医疗保健环境中用于多机器人机群控制的系统与方法与流程
本申请涉及用于在医疗保健环境中控制多机器人机群的系统和方法
背景技术:
1、移动机器人可以提高医疗保健环境(如,医院)中的运送效率,从而提高医务人员的工作效率。然而,当将移动机器人机群应用于医疗保健环境中时,会遇到一些挑战。
2、第一,医疗保健环境运行在严格的安全协议和功能之下。为物流系统或户外环境设计的现有机群控制系统无法满足医疗保健环境的安全要求。例如,应用于仓库物流系统的机群交通规则没有按照医疗紧急情况下的协议和路线规划而设计。如果将其应用于医院,尤其是应用于急诊室或手术室,会存在诸多问题。第二,目前还没有可为安全可靠的机器人机群管理系统提供规则的既定标准。现有的机群管理系统的标准与整个系统的结构有关,例如操作系统、任务调度器、机器人控制器等。第三,现有的机器人控制系统专注于单个机器人的导航、障碍物检测以及路径规划的能力。这些系统没有考虑在室内医疗保健环境中整合多种类型的机器人。
3、因此,需要有一种能够在医疗保健环境中控制多机器人机群且在医疗紧急情况下能够执行既定协议的系统。
技术实现思路
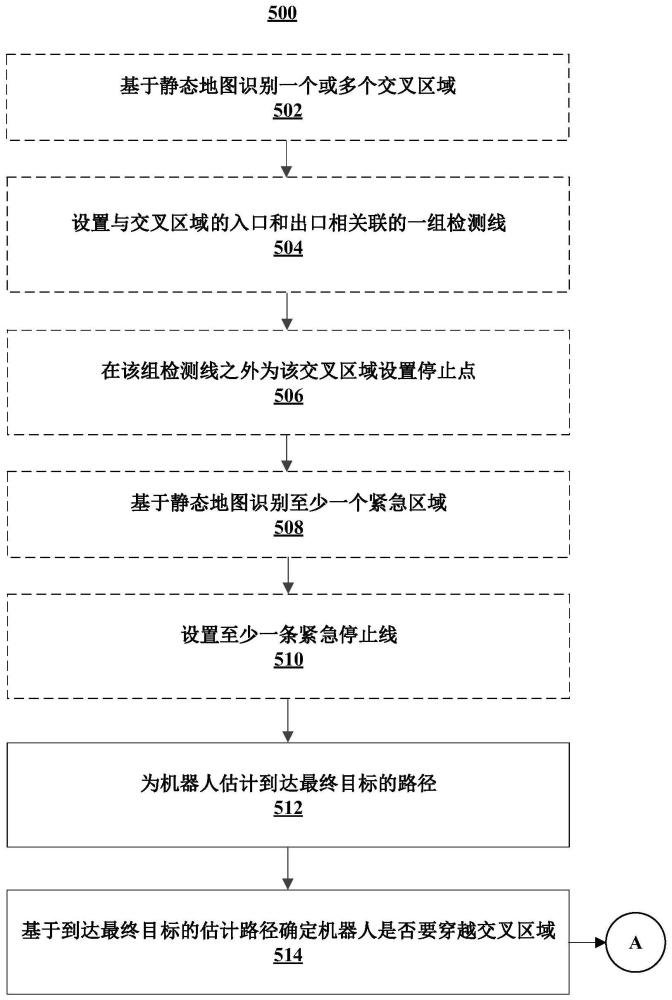
1、本申请实施例一方面提供了一种在医疗保健环境中通过网络设备执行的用于多机器人机群控制的方法,所述多机器人机群包括多个机器人。在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,所述方法可以包括:通过处理器估计机器人到达最终目标的路径。在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,所述方法可以包括:通过所述处理器基于估计出的到达所述最终目标的路径,确定所述机器人是否要穿越交叉区域。在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,所述方法可以包括:在确定所述机器人要穿越所述交叉区域时,通过所述处理器更新所述机器人的停止列表,以使得所述停止列表包括所述交叉区域对应的停止点。在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,所述方法可以包括:通过所述处理器控制所述机器人移动到并停在所述交叉区域对应的所述停止点上,直到所述多机器人机群中先于所述机器人到达所述交叉区域的任何其他机器人离开所述交叉区域。
2、本申请实施例另一方面提供了一种用于多机器人机群控制的设备,所述多机器人机群包括多个机器人。所述设备可以包括:处理器以及存储有多个指令的存储器。所述多个指令在被所述处理器执行时,使得所述处理器,在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,估计机器人到达最终目标的路径。所述多个指令在被所述处理器执行时,使得所述处理器,在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,基于估计出的到达所述最终目标的路径,确定所述机器人是否要穿越交叉区域。所述多个指令在被所述处理器执行时,使得所述处理器,在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,在确定所述机器人要穿越所述交叉区域时,更新所述机器人的停止列表,以使得所述停止列表包括所述交叉区域对应的停止点。所述多个指令在被所述处理器执行时,使得所述处理器,在所述多机器人机群的正常操作模式期间,针对所述多个机器人中的每一个机器人,控制所述机器人移动到并停在所述交叉区域对应的所述停止点上,直到所述多机器人机群中先于所述机器人到达所述交叉区域的任何其他机器人离开所述交叉区域。
3、本申请实施例再一方面提供了一种非暂时性计算机可读介质,其上存储有用于多机器人机群控制的多个指令,所述多机器人机群包括多个机器人。所述多个指令在被至少一个处理器执行时,实现上述一种在医疗保健环境中通过网络设备执行的用于多机器人机群控制的方法中的各步骤。
4、应当理解的是,上述的一般性描述和以下的详细描述都只是示例性的和解释性的,并不构成对本发明的限制。
技术特征:
1.一种在医疗保健环境中通过网络设备执行的用于多机器人机群控制的方法,所述多机器人机群包括多个机器人,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,控制所述机器人停在所述交叉区域对应的所述停止点上,直到所述多机器人机群中先于所述机器人到达所述交叉区域的任何其他机器人离开所述交叉区域,包括:
3.如权利要求1所述的方法,其特征在于,控制所述机器人停在所述交叉区域对应的所述停止点上,直到所述多机器人机群中先于所述机器人到达所述交叉区域的任何其他机器人离开所述交叉区域,包括:
4.如权利要求1所述的方法,其特征在于,所述方法还包括:
5.如权利要求4所述的方法,其特征在于,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种用于多机器人机群控制的设备,所述多机器人机群包括多个机器人,其特征在于,所述设备包括:
9.如权利要求8所述的设备,其特征在于,使得所述处理器,控制所述机器人停在所述交叉区域对应的所述停止点上,直到所述多机器人机群中先于所述机器人到达所述交叉区域的任何其他机器人离开所述交叉区域,包括:使得所述处理器,
10.一种非暂时性计算机可读介质,其特征在于,其上存储有用于多机器人机群控制的多个指令,所述多机器人机群包括多个机器人,所述多个指令在被至少一个处理器执行时,实现如权利要求1至7中的任一项所述的方法中的各步骤。
技术总结
本申请在一个方面提供了一种通过网络设备执行的多机器人机群控制方法。该方法可包括估计机器人到达最终目标的路径。该方法可包括基于估计出的到达最终目标的路径,确定机器人是否要穿越交叉区域。该方法可包括当确定机器人要穿越交叉区域时,更新机器人的停止列表,以使得停止列表包括交叉区域对应的停止点。该方法可包括控制机器人移动到并停在交叉区域对应的停止点上,直到多机器人机群中先于机器人到达交叉区域的任何其他机器人离开交叉区域。该方法可包括控制机器人在紧急操作模式期间移动到并停在紧急停止线上。
技术研发人员:刘志鹏,杜华光,赵方韵,张呈昆,谭欢
受保护的技术使用者:优创未来美国公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!