一种基于非正交云台的稳像方法与流程
本发明涉及云台设计,特别是一种基于非正交云台的稳像方法。
背景技术:
1、现有技术中多采用正交云台设计方法,正交云台虽然能够提供相互独立的运动轴,但在实际使用中,正交云台结构设计上不够紧凑,结构固频较低,控制带宽受限,无法满足云台尺寸日益缩小、控制精度要求日益提高的发展趋势,在某些应用场景中难以实现更高的稳定性和动态性能,进一步导致成像效果无法满足预期。
技术实现思路
1、为解决上述问题,本发明提出一种基于非正交云台的稳像方法,其可以在保证云台稳定性的同时,简化结构、降低成本,同时,本发明还可对非正交云台的三个运动轴进行解耦,以获取不同转动驱动组件的转动角速度,最终通过解耦后的转动角速度实现对转动驱动组件进行精确控制,以实现稳像控制。
2、为实现上述目的,本发明采用的技术方案是:
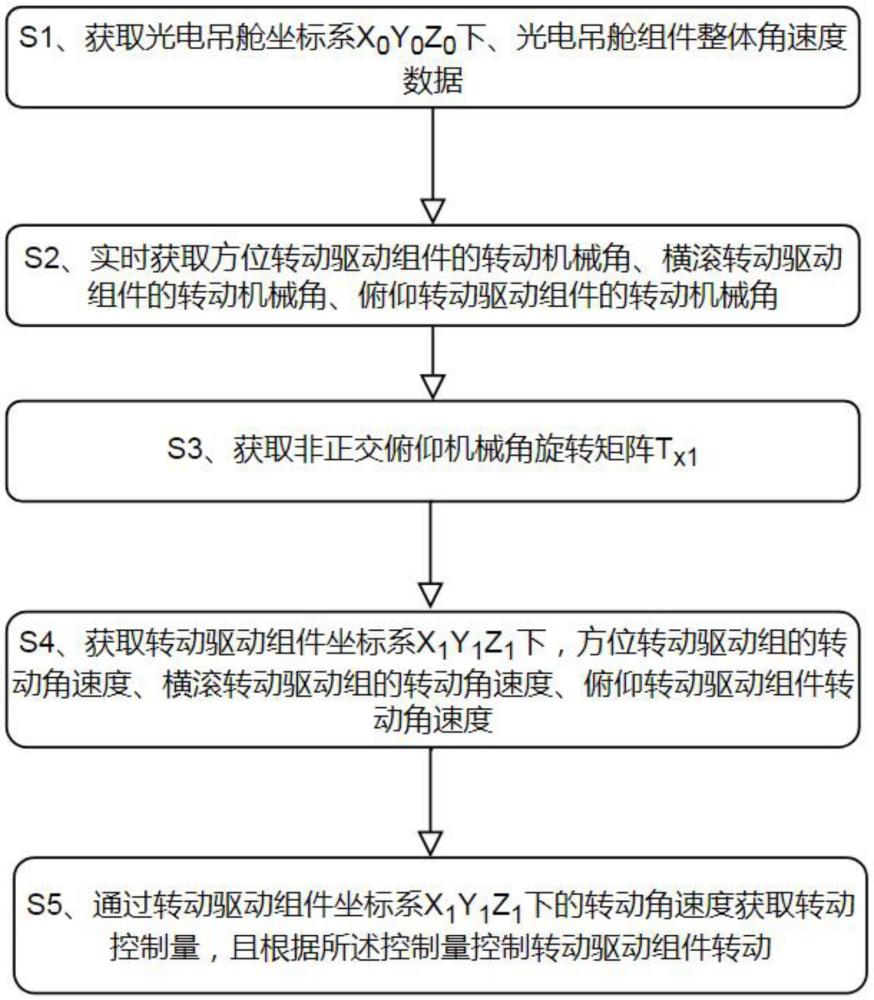
3、提供了一种基于非正交云台的稳像方法,其包括如下步骤:
4、获取光电吊舱坐标系x0y0z0下、光电吊舱组件整体的xyz三轴角速度数据;
5、获取俯仰转动驱动组件的转动机械角α;
6、按照公式(1)获取非正交俯仰机械角旋转矩阵tx1:
7、
8、根据所述俯仰机械角旋转矩阵tx1、光电吊舱组件整体在光电吊舱坐标系x0y0z0下的角速度数据获取转动驱动组件坐标系x1y1z1下,方位转动驱动组的转动角速度、横滚转动驱动组的转动角速度、俯仰转动驱动组件转动角速度,以完成非正交云台各转动驱动组件的解耦;
9、以及通过所述转动驱动组件坐标系x1y1z1下,方位转动驱动组的转动角速度、横滚转动驱动组的转动角速度、俯仰转动驱动组件的转动角速度中的一种或几种获取转动控制量,且根据所述控制量控制方位转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一种或几种转动。
10、优选的,根据公式(2)-(3)获取转动驱动组件坐标系x1y1z1下的方位转动驱动组件的转动角速度vz:
11、v0=tx*gyro (2)
12、vz=[v0]3,1 (3)
13、其中,v0为转动驱动组件坐标系x1y1z1下,方位转动驱动组件的转动角速度矩阵;tx为俯仰转动驱动组件的转动机械角α的旋转矩阵,且gyro为光电吊舱组件整体在光电吊舱坐标系x0y0z0下的xyz三轴角速度,且gyro=[gyrox,gyroy,gyroz]t,t表示矩阵转置,gyrox、gyroy、gyroz分别为x轴角速度、y轴角速度以及z轴角速度。
14、优选的,根据公式(4)获取转动驱动组件坐标系x1y1z1下,光电吊舱组件整体的三轴角速度v1:
15、v1=tx1*gyro (4)
16、根据公式(5)获取转动驱动组件坐标系x1y1z1下,横滚转动驱动组件的转动角速度量vy:
17、vy=[v1]2,1-vzsinα (5)。
18、优选的,根据公式(6)获取转动驱动组件坐标系x1y1z1下,俯仰转动驱动组件的转动角速度量vx;
19、vx=gyrox (6)。
20、优选的,通过所述转动驱动组件坐标系x1y1z1下,方位转动驱动组的转动角速度、横滚转动驱动组的转动角速度、俯仰转动驱动组件的转动角速度中的一种或几种获取转动控制量,且根据所述控制量控制方位转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一种或几种转动,包括如下步骤:
21、获取设定的姿态角期望角度与光电吊舱组件的姿态角之间的姿态角差值;
22、通过角度控制器等获取转动驱动组件坐标系x1y1z1下,方位转动驱动组的预期转动角速度vz0、横滚转动驱动组的预期转动角速度vy0、俯仰转动驱动组件的预期转动角速度vx0中的一种或几种;
23、获取俯仰转动驱动组件的预期转动角速度vx0、俯仰转动驱动组件的转动角速度量vx之间的俯仰转动角度差值,和/或,横滚转动驱动组的预期转动角速度vy0、横滚转动驱动组件的转动角速度量vy之间的横滚转动角度差值,和/或,方位转动驱动组的预期转动角速度vz0、方位转动驱动组件的转动角速度量vz之间的方位转动角度差值;
24、根据姿态角差值、俯仰转动角度差值、横滚转动角度差值、方位转动角度差值中的一项或几项生成转动控制量;
25、控制单元根据所述转动控制量控制转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一种或几种转动。
26、优选的,所述非正交云台包括:
27、转接单元,其连接可移动设备;
28、方位转动驱动组件,其连接所述转接单元;
29、方位支架,其连接所述方位转动驱动组件;
30、横滚转动驱动组件,其连接所述方位支架;
31、俯仰支架,其连接所述横滚转动驱动组件;
32、俯仰转动驱动组件,其连接所述俯仰支架;
33、以及光电吊舱组件,其连接所述俯仰转动驱动组件;
34、所述方位转动驱动组件用于带动方位支架、横滚转动驱动组件、俯仰支架、俯仰转动驱动组件、光电吊舱组件同步在方位角方向转动;所述横滚转动驱动组件用于带动俯仰支架、俯仰转动驱动组件、光电吊舱组件同步在横滚角方向转动,所述俯仰转动驱动组件用于带动光电吊舱组件在横滚角方向转动;
35、所述方位转动驱动组件的中心轴线、横滚转动驱动组件的中心轴线不垂直;所述横滚转动驱动组件的中心轴线与俯仰转动驱动组件处于零位时,光电吊舱组件的中心轴线之间形成一锐角。
36、优选的,所述俯仰转动驱动组件的中心轴线与横滚转动驱动组件的中心轴线、方位转动驱动组件的中心轴线均垂直。
37、优选的,所述光电吊舱组件包括:
38、控制模块,其分别连接所述方位转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一项或几项;
39、载荷模块,其连接所述控制模块,用于获取图像信息和/或距离信息。
40、优选的,所述载荷模块包括可见光相机、红外相机、激光测距设备、雷达中的一种或几种。
41、优选的,所述光电吊舱组件还包括:姿态测量模块,其连接所述控制模块,用于获取光电吊舱组件整体的姿态信息。
42、使用本发明的有益效果是:
43、本申请中的云台的各运动轴之间为非正交结构设计,其可以在保证云台稳定性的同时,简化结构、降低成本,同时,本发明还可对非正交云台的三个运动轴进行解耦,以获取不同转动驱动组件的转动角速度,最终通过解耦后的转动角速度实现对转动驱动组件进行精确控制,以提高云台稳定性,并达到良好的稳像效果。
技术特征:
1.一种基于非正交云台的稳像方法,其特征在于,包括如下步骤:
2.如权利要求1所述的稳像方法,其特征在于,根据公式(2)-(3)获取转动驱动组件坐标系x1y1z1下的方位转动驱动组件的转动角速度vz:
3.如权利要求1所述的稳像方法,其特征在于,根据公式(4)获取转动驱动组件坐标系x1y1z1下,光电吊舱组件整体的三轴角速度v1:
4.如权利要求2所述的稳像方法,其特征在于,根据公式(6)获取转动驱动组件坐标系x1y1z1下,俯仰转动驱动组件的转动角速度量vx;
5.如权利要求2所述的稳像方法,其特征在于,通过所述转动驱动组件坐标系x1y1z1下,方位转动驱动组的转动角速度、横滚转动驱动组的转动角速度、俯仰转动驱动组件的转动角速度中的一种或几种获取转动控制量,且根据所述控制量控制方位转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一种或几种转动,包括如下步骤:
6.如权利要求1所述的稳像方法,其特征在于,所述非正交云台包括:
7.如权利要求6所述的稳像方法,其特征在于,所述俯仰转动驱动组件的中心轴线与横滚转动驱动组件的中心轴线、方位转动驱动组件的中心轴线均垂直。
8.如权利要求6所述的稳像方法,其特征在于,所述光电吊舱组件包括:
9.如权利要求8所述的稳像方法,其特征在于,所述载荷模块包括可见光相机、红外相机、激光测距设备、雷达中的一种或几种。
10.如权利要求8所述的稳像方法,其特征在于,所述光电吊舱组件还包括:姿态测量模块,其连接所述控制模块,用于获取光电吊舱组件整体的姿态信息。
技术总结
本发明涉及一种基于非正交云台的稳像方法,其包括如下步骤:获取光电吊舱组件整体的XYZ三轴角速度数据;获取俯仰转动驱动组件的转动机械角;获取非正交俯仰机械角旋转矩阵;获取转动驱动组件的转动角速度;以及通过转动驱动组件的转动角速度获取转动控制量,且所述控制量控制方位转动驱动组件、横滚转动驱动组件、俯仰转动驱动组件中的一种或几种转动。本发明可以在保证云台稳定性的同时,简化结构、降低成本,同时,本发明还可对非正交云台的三个运动轴进行解耦,以获取不同转动驱动组件的转动角速度,最终通过解耦后的转动角速度实现对转动驱动组件进行精确控制,以实现稳像控制。
技术研发人员:黄立,余哲,张磊,陈虎,薛源,胡倩
受保护的技术使用者:普宙科技有限公司
技术研发日:
技术公布日:2024/9/5
- 还没有人留言评论。精彩留言会获得点赞!