一种面向应急救灾的无人机集群自适应航线规划方法
本发明涉及遥感无人机航线规划,具体是一种面向应急救灾的无人机集群自适应航线规划方法。
背景技术:
1、无人机航线规划技术是一种根据无人机的性能、任务需求以及环境约束,为其生成一条从起点到终点,满足各种约束条件的最优飞行路径的技术。这种技术在无人机执行灾区勘测,应急救援等多种任务中扮演着至关重要的角色。
2、但是目前的航线规划采用单一的分割方法,没有考虑灾害内部的严重性主次关系,导致整体无人机勘测精度差。同时,现有的航线规划采用无法自适应的遗传算法,只能考虑单一时段局部最优,无法实现面向灾区情况的自适应航线规划,严重影响了应急救灾的实时性。
技术实现思路
1、本发明的目的在于提供一种面向应急救灾的无人机集群自适应航线规划方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种面向应急救灾的无人机集群自适应航线规划系统,包括算法模块,所述算法模块包括改进的速构包络算法、德洛内三角剖分法和自适应进化搜索算法,所述算法模块供灾害区域划分;
3、覆盖模块,所述覆盖模块根据灾害严重程度对灾害区域进行z形覆盖、螺旋覆盖和多边形覆盖,所述覆盖模块供无人机航迹的初步规划;以及
4、规划模块,所述规划模块以实践和航迹路程为标准生成地面高程模型,解算出最优自适应航线后导出三维kml数据。
5、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,包括
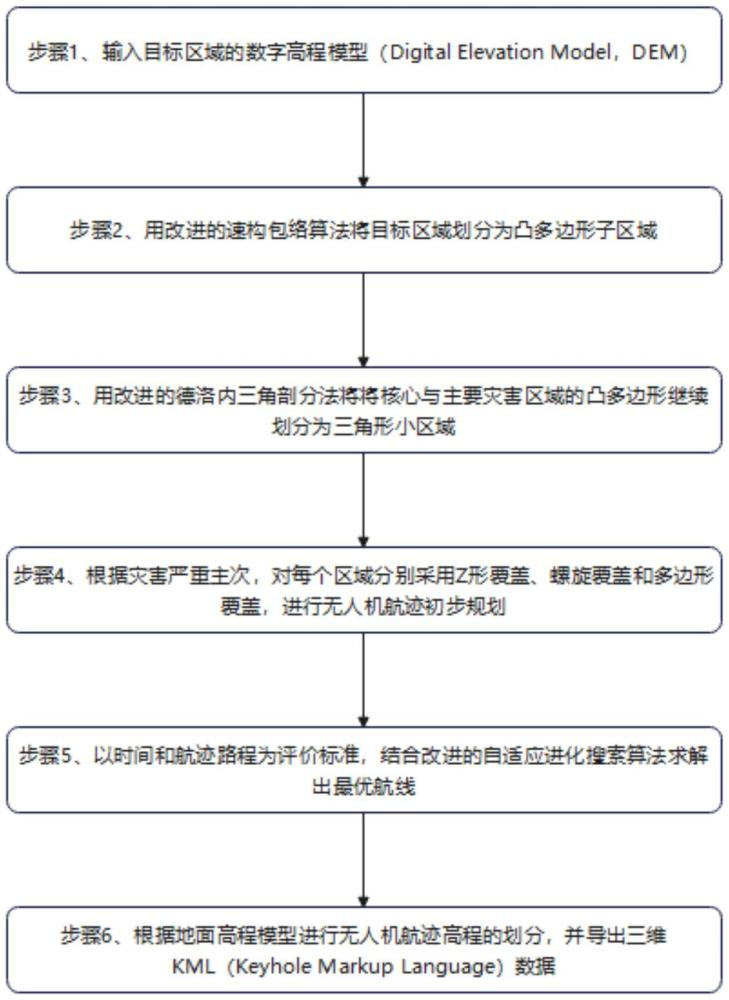
6、步骤s1:输入目标区域的数字高程模型;
7、步骤s2:用改进的速构包括算法将目标区域划分为凸多边形子区域;
8、步骤s3:用改进的德洛内三角剖分法将核心与主要灾害区域的凸多边形划分为多三角形小区域;
9、步骤s4:根据灾害严重程度对各区域分别采用z形覆盖、螺旋覆盖和多边形覆盖,以进行无人机航迹的初步规划;
10、步骤s5:以时间和航迹路程为评价标准,结合改进的自适应进化搜索方法求出最优航线;
11、步骤s6:根据地面高程模型进行无人机航迹高程的划分并导出三维kml数据。
12、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,所述步骤s2包括
13、步骤s21:根据灾害周界信息对周界内进行均匀点的划分并设立包含有灾害点二维向量的灾害点集合;
14、步骤s22:设置凸包边界点集合并对其作初始化处理;
15、步骤s23:从初始灾害点集合中寻找二维向量的记录点;
16、步骤s24:使用线段plpr将初始灾害点集合进行点集划分,使得点集分别位于上凸多边形和下凸多边形中;
17、步骤s25:对每个子集均进行plpr解算;
18、步骤s26:重复步骤s24和步骤s25以构建线段plpr最远点的凸包;
19、步骤s27:连接凸包中的点并将区域划分为包含最少点的凸多边形;
20、步骤s28:对所有凸多边形进行灾害严重主次判断并设置灾害数。
21、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,所述步骤s3包括
22、步骤s31:设立多边形所有点的集合并对每个点进行二维坐标的赋值;
23、步骤s32:选择点集中可构建初始三角形的三个点;
24、步骤s33:通过最近邻搜索对点集中剩余的点进行三角形规划;
25、步骤s34:迭代计算任意点到三角形的外接圆距离;
26、步骤s35:对满足德洛内条件的图形计算停止迭代并输出结果。
27、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,所述步骤s4包括
28、步骤s41:对核心灾害区域采用z形覆盖并进行高限定性无人机飞行巡逻;
29、步骤s42:对主要灾害区域采用螺旋覆盖并进行中限定性无人机飞行巡逻;
30、步骤s43:对一般灾害区域采用多边形覆盖并进行低限定性无人机飞行巡逻。
31、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,所述步骤s5包括
32、步骤s51:记录单架无人机数量以及其航线覆盖的多边形;
33、步骤s52:设置初始个体并计算出个体的初始码;
34、步骤s53:对个体进标准打分并筛选出优越个体;
35、步骤s54:以设定的条件淘汰种群中不良个体;
36、步骤s55:依据设定的变异概率随机确定变异个体并执行变异操作;
37、步骤s56:重复步骤s53-s55的步骤并计算出满意规划路径;
38、步骤s57:重复步骤s52-s56以对设置的自适应时间节点进行更新。
39、作为本发明再进一步的方案:一种面向应急救灾的无人机集群自适应航线规划方法,所述步骤s6包括
40、步骤s61:导入数字高程模型;
41、步骤s62:导入目标区域事实障碍物高程;
42、步骤s63:根据公式解算无人机航线高程;
43、步骤s64:以kml形式导出无人机三维高程航线。
44、与现有技术相比,本发明的有益效果是:
45、本申请在不改变无人机投入的情况下对无人机集群勘测方法的速度进行有效优化,具体通过利用改进速构包络算法、改进德洛内三角剖分法、改进自适应进化搜索算法和地面高程模型,求解满足目标区域全覆盖的最快观测方案,达到解算最优自适应航线的要求,大幅提升灾害救援的时效性。
技术特征:
1.一种面向应急救灾的无人机集群自适应航线规划系统,其特征在于,包括算法模块,所述算法模块包括改进的速构包络算法、德洛内三角剖分法和自适应进化搜索算法,所述算法模块供灾害区域划分;
2.根据权利要求1所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,包括
3.根据权利要求2所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,所述步骤s2包括
4.根据权利要求3所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,所述步骤s3包括
5.根据权利要求4所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,所述步骤s4包括
6.根据权利要求5所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,所述步骤s5包括
7.根据权利要求6所述的一种面向应急救灾的无人机集群自适应航线规划方法,其特征在于,所述步骤s6包括
技术总结
本发明提供一种面向应急救灾的无人机集群自适应航线规划方法,首先用改进的速构包络算法将目标区域划分为凸多边形子区域,接着采用改进的德洛内三角剖分法将核心与主要灾害区域的凸多边形继续划分为三角形小区域,然后根据灾害严重主次,对每个区域分别采用Z形覆盖、螺旋覆盖和多边形覆盖,进行无人机航迹初步规划,再以时间和航迹路程为评价标准,本发明通过利用改进速构包络算法、改进德洛内三角剖分法、改进自适应进化搜索算法和地面高程模型,解算最优自适应航线,大幅度提升了规划速度和精度,同时减少了无人机任务路程和时间,满足灾害救援实时性和应急性的特点,为灾害救援领域提供了一种行之有效的自适应航线规划方法。
技术研发人员:杨天明,孟庆祥,全心逸,赵子谦
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!