一种基于遗传算法的无人机载穿墙三维SAR航迹规划方法
本发明属于穿墙雷达领域,尤其涉及对三维成像场景的航迹优化。
背景技术:
1、穿墙雷达是一种利用低频电磁波穿透特性探测建筑物结构和墙后目标的技术,可不受障碍物遮挡影响,对墙后遮蔽空间信息进行穿透感知。目前穿墙雷达的工作体制主要包括多发多收(multiple-input multiple-output,mimo)雷达和合成孔径雷达(syntheticaperture radar,sar)。mimo阵列穿墙雷达具有时效性高的特点,常用于墙后动目标检测、定位与跟踪等,在二维和三维成像上具有广泛的应用。与mimo穿墙雷达相比,二维穿墙sar具有观测范围广、分辨率高等优势,常用于建筑物结构布局重构和室内静目标成像。穿墙sar通常利用信号的超宽带提供距离向的高分辨率,利用水平方位向的合成孔径提供方位向高分辨率。三维穿墙sar成像能直观反映出目标高度维信息,在灾害救援等领域有着重要应用,近年来受到广泛关注。sar与mimo相结合可以提供水平方位向和高度向的高分辨率。目前,穿墙雷达还主要使用车载或手持平台,在城市复杂高层楼宇场景中,传统车载穿墙雷达通常在地面上运行,无法胜任不可达高楼层场景,例如高层火灾救援等;手持固定平台mimo穿墙雷达观测范围受限的局限性更为突出,无法对大规模场景进行探测与成像。相比之下,将无人机的灵活性与穿墙雷达的穿透能力相结合的机载穿墙雷达,可无视照射高度限制,能够对高层建筑进行穿透探测与成像,从而有效解决传统穿墙雷达探测高度受限问题,但目前还鲜有利用无人机载穿墙雷达在城市建筑遮蔽空间开展穿透探测的研究报道。
2、目前已有的无人机载三维层析sar通常采用多基线扫描式的飞行方式,即以多个密集的水平航过扫描同一区域进行成像(mb-sar,multi baseline sar)。这种飞行模式下,为避免高度向空域欠采样导致的栅瓣效应或高度模糊,其基线间距需要小于半波长,无人机在续航时间内只能完成对小片区域成像,无法满足城市楼宇大范围穿墙成像的需求。而使用大间距扫描以获得更大探测区域时,成像质量会因栅瓣效应而严重恶化。
技术实现思路
1、为解决上述问题,本发明提出一种基于遗传算法的无人机载穿墙三维sar航迹规划方法。本发明针对传统无人机三维层析sar多航过飞行耗时长、效率低、扫描面积小以及成像存在栅瓣效应等问题,将阵列优化抑制栅瓣的原理推广至无人机载穿墙sar中,基于遗传算法实现无人机飞行距离和三维sar成像质量的联合优化;针对高度向欠采样导致的栅瓣效应,提出三种优化飞行模式,在满足飞行效率条件下,实现对墙后目标的高质量成像。
2、本发明的技术解决方案如下:
3、一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,包括如下步骤:
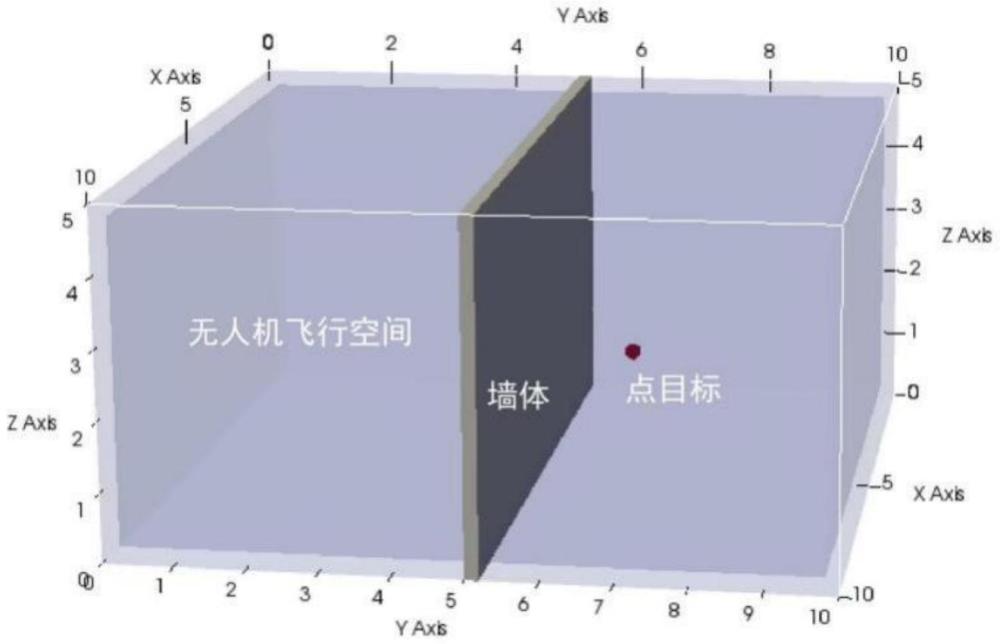
4、步骤1:建立墙后点目标回波模型;
5、根据实际需求设置三维场景方位向、距离向与高度向范围,确定墙体位置、厚度、介电常数等参数,并设置墙后点目标位置。
6、步骤2:设置遗传算法代价函数;
7、无人机载穿墙雷达的飞行方式会显著影响目标区域的成像质量,需要在有限的飞行距离下对三维成像的质量进行定量评估,最终结合雷达成像质量与飞行距离构造代价函数。
8、步骤3:构建三种飞行模式及基因型;
9、根据无人机飞行模式的不同,将其分为三种不同的飞行方式,分别为非等间距多行过飞行(umb,unequally-spaced multi baseline)、交叉飞行(cf-sar,cross flightsar)与斜线飞行(of-sar,oblique flight sar)。
10、步骤4:基于遗传算法进行迭代计算;
11、首先随机初始化种群,其中每个个体代表一条完整的飞行航迹,根据飞行航迹进行sar三维成像仿真,然后依据上述代价函数计算种群中所有个体的代价函数。根据代价函数的高低,带有随机地选择若干个体,两两交叉互换,繁殖得到下一代种群。不断重复这一过程,直至连续30次迭代中代价函数始终没有降低,停止迭代,输出该飞行模式下的最优航迹。
12、步骤5:得到并验证不同飞行模式下的最优航迹;
13、为验证穿墙场景下所提方法的有效性,电磁波需要穿过较为复杂的墙体介质,使用解析公式获取穿墙场景的雷达回波存在一定困难,使用开源有限时域差分数值仿真软件gprmax生成雷达回波数据,对上述所提umb-sar、cf-sar和of-sar飞行模式航迹优化结果进行验证。在实际的仿真雷达回波数据的生成过程中,直接使用gprmax发射大脉宽调频连续波信号将导致仿真时间过长,故设置雷达天线发射信号为无载波的冲激脉冲波形,所得回波近似为系统冲激响应。仿真场景可视为一个线性时不变系统,将冲激响应与线性调频信号相卷积,从而得到对应于输入线性调频信号的仿真穿墙场景回波信号。对该回波进行脉冲压缩,并经过距离插值、后向投影、相干累加等过程,最终得到三维后向投影成像结果。
14、有益效果
15、本发明提出了一种基于遗传算法的无人机载穿墙雷达三维sar成像的航迹规划方法。本发明提出三种可能的飞行方式,建立相应的基因型,以遗传算法兼顾无人机的飞行距离与成像质量,求解多约束条件下的非凸优化。经过仿真实验与实测实验的验证,本方法在相同飞行距离下,相较于传统多基线飞行有显著提升,属于一种高效的穿墙探测方法。
技术特征:
1.一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,包括如下步骤:
2.如权利要求1所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤2中代价函数中飞行距离部分设计为分段函数形式,如下式所示:
3.如权利要求1所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤2中无人机载穿墙sar航迹规划问题可描述为带有约束条件的最优化问题:
4.如权利要求1所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤3中根据无人机飞行模式的不同,将其分为三种不同的飞行方式,分别为非等间距多行过飞行(umb,unequally-spaced multi baseline)、交叉飞行(cf-sar,crossflight sar)与斜线飞行(of-sar,oblique flight sar)。
5.如权利要求4所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤3中umb-sar基因型设置为长度为500的01向量;确保基线最短间距大于半波长,即对于基因型的下标而言,任意两个“1”的下标差应大于固定值c,如下式所示:
6.如权利要求4所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤3中cf-sar基因型设置为长度为1500的01向量,前500部分表征水平方向飞行,后1000部分表征竖直方向飞行;为保证航过最短间距大于半波长,限制条件如下式所示:
7.如权利要求4所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤3中总航过数目为n,of-sar基因型为行数为n1、列数为3的二维矩阵,每行数据对应一个路径点的三维坐标;对单个基线的长度限制为必须大于最短距离lmin,如下式所示:
8.如权利要求1所述的一种基于遗传算法的无人机载穿墙三维sar航迹规划方法,其特征在于,步骤5中通过开源有限时域差分数值仿真软件gprmax生成雷达回波数据进行验证。
技术总结
本发明公开了一种基于遗传算法的无人机载穿墙雷达三维SAR成像的航迹规划方法。本发明从BP成像公式出发,提出三种可能的飞行方式,以遗传算法兼顾无人机的飞行距离与成像质量,求解多约束条件下的非凸优化。经过仿真实验与实测实验的验证,本方法在相同飞行距离下,相较于传统多基线飞行有显著提升,验证了方法的有效性。
技术研发人员:杨小鹏,马忠杰,钟世超,渠晓东,曾小路
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!