一种超声速飞行器横向解耦补偿控制方法
本发明属于航空航天,具体涉及一种超声速飞行器横向解耦补偿控制方法的设计。
背景技术:
1、超声速飞行器在进行较大的机动过程中,需要保持滚转通道控制指令跟踪稳定和姿态稳定。较大的飞行攻角α对滚转通道产生较大的运动耦合,较大的偏航舵偏角δy对滚转通道产生较大的操纵耦合,这两种耦合都会对滚转通道的控制带来附加的干扰力矩,产生符号相同或者相反的滚转角速度,导致滚转通道不能实现精准控制,控制指令也无法准确的跟踪,造成滚转通道振荡甚至发散。此外,不同大小的攻角和偏航舵偏角带来的滚转通道耦合的大小也不一样,耦合的程度随着飞行器飞行状态的变化而变化。确保飞行安全是飞行任务的重中之重,如何保证超声速飞行器在滚转通道受到较大的耦合干扰时,滚转通道仍能保持控制稳定,是超声速飞行器研制的一项关键技术。
技术实现思路
1、本发明的目的是为了解决超声速飞行器在滚转通道受到较大的耦合干扰时,滚转通道无法保持控制稳定的问题,提出了一种超声速飞行器横向解耦补偿控制方法。
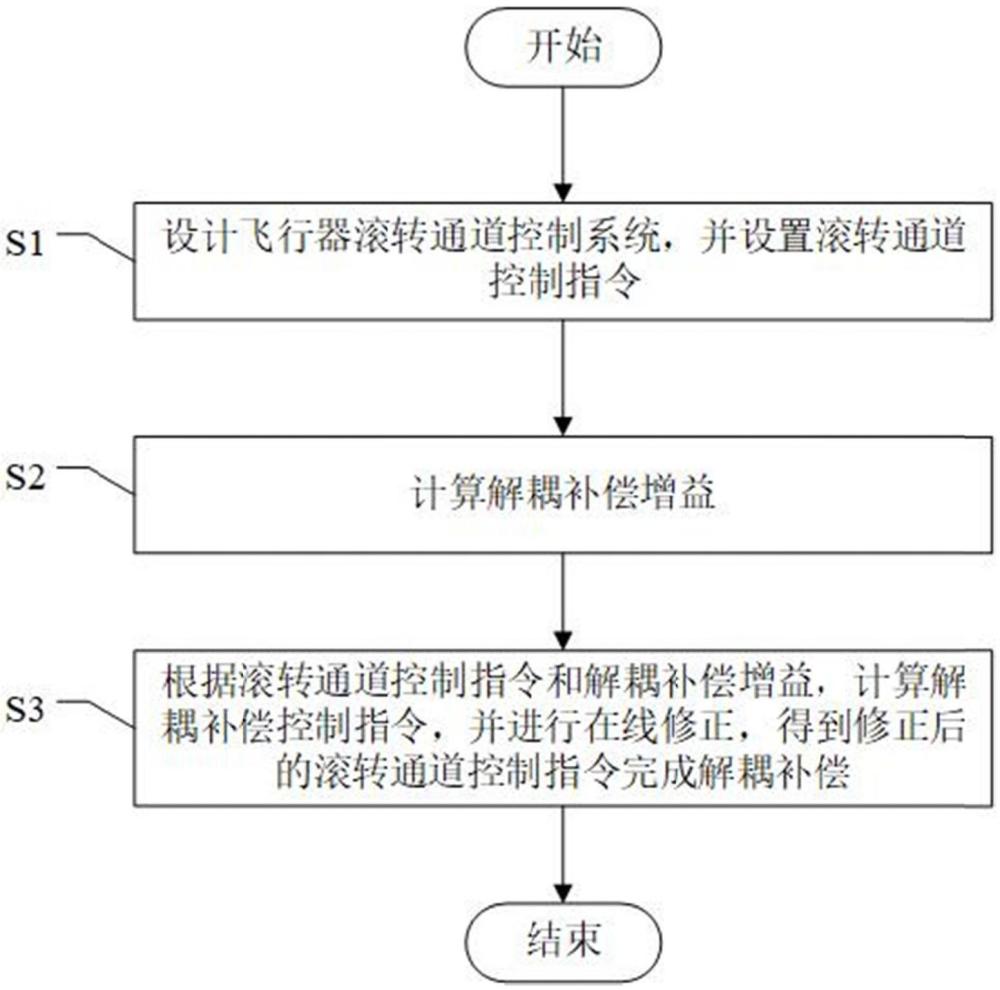
2、本发明的技术方案为:一种超声速飞行器横向解耦补偿控制方法,包括以下步骤:
3、s1.设计飞行器滚转通道控制系统,并设置滚转通道控制指令δxc1;
4、s2.计算解耦补偿增益;
5、s3.根据滚转通道控制指令δxc1和解耦补偿增益,计算解耦补偿控制指令δδx,并进行在线修正,得到修正后的滚转通道控制指令δxc完成解耦补偿。
6、本发明的有益效果是:
7、1.在超声速持续大过载机动输出偏航舵偏控制指令易引发滚转通道操纵耦合的情况下,通过设计指令生成器,在线修正滚转通道控制指令,来抑制飞行器持续大过载机动过程中的横侧向操纵耦合,确保机动过程中飞行安全。
8、2.本发明工作方式简洁可靠,指令修正方法易操作且效果明显。
9、作为优选,步骤s1中所述飞行器滚转通道控制系统包括滚转通道滚转角自动驾驶仪;所述滚转通道滚转角自动驾驶仪包括增稳回路、滚转角反馈回路和解耦补偿结构;所述增稳回路由滚转角速率反馈回路组成。
10、上述优选方案的有益效果:
11、设计滚转通道滚转角自动驾驶仪并引入解耦补偿结构通过滚转通道滚转角自动驾驶仪解算滚转舵控制指令,抑制滚转角速度振荡现象,提高了控制精度。
12、作为优选,所述步骤s1具体包括以下步骤:
13、s11.设计滚转角反馈回路的控制参数;
14、s12.基于滚转角反馈回路的控制参数,设置滚转通道控制指令δxc1。
15、上述优选方案的有益效果是:
16、通过设计滚转通道滚转角自动驾驶仪中的滚转角反馈回路的控制参数,并选取不同高度、不同速度滚转角反馈回路控制增益和角速率反馈回路控制增益,以及计算滚转通道控制指令δxc1完成飞行器滚转通道控制系统的设计,使得飞行器完成飞行任务。
17、作为优选,步骤s2中所述解耦补偿增益的计算公式为:
18、
19、其中,α表示飞行攻角;δy表示偏航舵偏角;k表示解耦补偿增益,为由攻角和偏航舵偏角插值的二维插值表;表示滚转力矩系数对偏航舵偏角的导数;表示滚转力矩系数对滚转舵偏角的导数。
20、上述优选方案的有益效果是:
21、通过计算解耦补偿增益对滚转通道控制指令δxc1进行修正,防止飞行器的滚转通道在飞行过程中因攻角引起的运动耦合和偏航舵偏引起的操纵耦合而不稳定,确保飞行安全性。
22、作为优选,所述步骤s3具体包括以下步骤:
23、s31.根据解耦补偿增益,计算解耦补偿控制指令δδx;
24、s32.根据解耦补偿控制指令δδx对滚转通道控制指令δxc1进行在线修正,得到修正后的滚转通道控制指令δxc;
25、s33.将修正后的滚转通道控制指令δxc送入飞行器滚转通道控制系统中的弹上控制系统,弹上控制系统根据修正后的滚转通道控制指令δxc控制飞行器飞行,实现解耦补偿。
26、作为优选,步骤s31中所述解耦补偿控制指令δδx的计算公式为:
27、δδx=kαδy
28、其中,k表示解耦补偿增益;α表示飞行攻角;δy表示偏航舵偏角。
29、作为优选,步骤s32中所述修正后的滚转通道控制指令δxc的计算公式为:
30、δxc=δxc1+δδx。
31、上述优选方案的有益效果是:
32、通过计算解耦补偿增益对滚转通道控制指令δxc1进行修正,实时生成飞行器当前修正后的滚转通道控制指令δxc,防止飞行器的滚转通道在飞行过程中因攻角引起的运动耦合和偏航舵偏引起的操纵耦合而不稳定,确保飞行安全性。
技术特征:
1.一种超声速飞行器横向解耦补偿控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的超声速飞行器横向解耦补偿控制方法,其特征在于:步骤s1中所述飞行器滚转通道控制系统包括滚转通道滚转角自动驾驶仪;所述滚转通道滚转角自动驾驶仪包括增稳回路、滚转角反馈回路和解耦补偿结构;所述增稳回路由滚转角速率反馈回路组成。
3.根据权利要求2所述的超声速飞行器横向解耦补偿控制方法,其特征在于,所述步骤s1具体包括以下步骤:
4.根据权利要求1所述的超声速飞行器横向解耦补偿控制方法,其特征在于,步骤s2中所述解耦补偿增益的计算公式为:
5.根据权利要求1所述的超声速飞行器横向解耦补偿控制方法,其特征在于,所述步骤s3具体包括以下步骤:
6.根据权利要求5所述的超声速飞行器横向解耦补偿控制方法,其特征在于,步骤s31中所述解耦补偿控制指令δδx的计算公式为:
7.根据权利要求6所述的超声速飞行器横向解耦补偿控制方法,其特征在于,步骤s32中所述修正后的滚转通道控制指令δxc的计算公式为:
技术总结
本发明属于航空航天技术领域,具体公开了一种超声速飞行器横向解耦补偿控制方法,包括设计飞行器滚转通道控制系统,并计算滚转通道控制指令δ<subgt;xc1</subgt;;计算解耦补偿增益;根据滚转通道控制指令δ<subgt;xc1</subgt;和解耦补偿增益,计算解耦补偿控制指令δ<subgt;Δx</subgt;,并进行在线修正,得到修正后的滚转通道控制指令δ<subgt;xc</subgt;完成解耦补偿。超声速飞行器在攻角和偏航舵偏角带来的操纵耦合的情况下,通过设计指令生成器,在线修正滚转通道控制指令,来抑制飞行器持续大过载机动过程中的横侧向操纵耦合,确保机动过程中飞行安全,工作方式简洁可靠,指令修正方法易操作且效果明显。解决了超声速飞行器在滚转通道受到较大的耦合干扰时,滚转通道无法保持控制稳定的问题。
技术研发人员:董皓含,凡永华,樊朋飞,王蕊华,张卓立,陈成林,张涛,胡靖琨,李田丰,凡文帅
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!