融合深度学习的无人艇模型预测控制方法和装置
本申请涉及水面无人艇,特别是涉及一种融合深度学习的无人艇模型预测控制方法和装置。
背景技术:
1、水面无人艇(unmanned surface vehicle,简称usv)作为我国海上力量的重要组成部分,在海上巡逻、军事侦察、环境检测、岛礁测量等方面有着越来越重要的应用。
2、目前,水面无人艇的航行环境不断的变化,而往往不断变化的环境与气象具有高度的复杂、不确定、难以预测和不可穷尽性等特征。
3、因此,如何建立精确的无人艇的动力学模型实现水面无人艇的准确控制成为当下亟待解决的技术问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高控制精确度的融合深度学习的无人艇模型预测控制方法和装置。
2、第一方面,本申请提供了一种融合深度学习的无人艇模型预测控制方法,该方法包括:
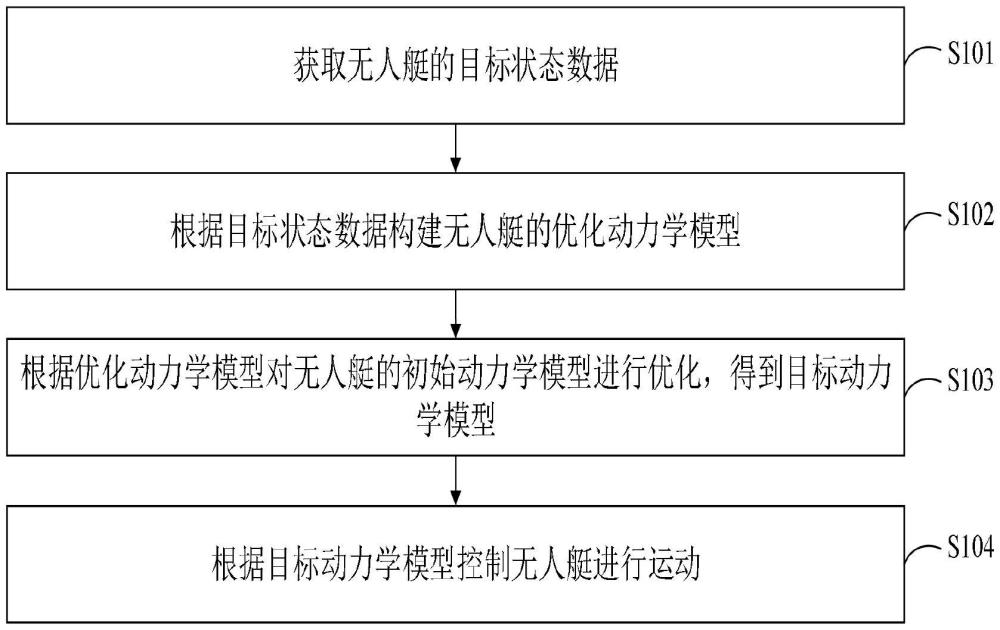
3、获取无人艇的目标状态数据;
4、根据目标状态数据构建无人艇的优化动力学模型;
5、根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型;
6、根据目标动力学模型控制无人艇进行运动。
7、在其中一个实施例中,根据目标状态数据构建无人艇的优化动力学模型,包括:
8、将目标状态数据输入至预先训练好的长短期记忆神经网络中进行预测,得到无人艇的运动参数;
9、将运动参数代入到数据驱动模型中,构建得到优化动力学模型。
10、在其中一个实施例中,获取无人艇的目标状态数据,包括:
11、获取无人艇的状态数据;
12、将状态数据输入至预选训练好的变分自编码器网络进行预处理,得到目标状态数据。
13、在其中一个实施例中,变分自编码器网络包括编码子网络和解码子网络,将状态数据输入至预选训练好的变分自编码器网络进行预处理,得到目标状态数据,包括:
14、将状态数据输入至编码子网络进行特征提取,得到中间数据;
15、将中间数据输入至解码子网络进行降维处理和数据重构,得到目标状态数据。
16、在其中一个实施例中,根据目标动力学模型控制无人艇进行运动,包括:
17、以目标动力学模型对应的代价函数最小为原则,根据约束条件求解目标动力学模型,得到控制量和状态量;
18、根据控制量和状态量控制无人艇进行运动。
19、在其中一个实施例中,约束条件包括一致性条件线性化矩阵、成本函数线性化矩阵、连续化条件线性化矩阵。
20、第二方面,本申请还提供了一种融合深度学习的无人艇模型预测控制装置,该装置包括:
21、获取模块,用于获取无人艇的目标状态数据;
22、构建模块,用于根据状态数据构建无人艇的优化动力学模型;
23、优化模块,用于根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型;
24、控制模块,用于根据目标动力学模型控制无人艇进行运动。
25、第三方面,本申请还提供了一种计算机设备,该计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现以下步骤:
26、获取无人艇的目标状态数据;
27、根据目标状态数据构建无人艇的优化动力学模型;
28、根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型;
29、根据目标动力学模型控制无人艇进行运动。
30、第四方面,本申请还提供了一种计算机可读存储介质,该计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
31、获取无人艇的目标状态数据;
32、根据目标状态数据构建无人艇的优化动力学模型;
33、根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型;
34、根据目标动力学模型控制无人艇进行运动。
35、第五方面,本申请还提供了一种计算机程序产品,该计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
36、获取无人艇的目标状态数据;
37、根据目标状态数据构建无人艇的优化动力学模型;
38、根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型;
39、根据目标动力学模型控制无人艇进行运动。
40、上述融合深度学习的无人艇模型预测控制方法和装置,该方法通过获取无人艇的目标状态数据,然后根据目标状态数据构建无人艇的优化动力学模型,以及根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型,再根据目标动力学模型控制无人艇进行运动。上述方法通过优化动力学模型对现有的初始动力学模型进行优化,得到目标动力学模型,相比于现有的动力学模型,上述方法中利用优化后的目标动力学模型进行无人艇控制时,能够准确的实现无人艇的控制,可以一定程度上提高无人艇的动力学模型的控制精度。
技术特征:
1.一种融合深度学习的无人艇模型预测控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标状态数据构建所述无人艇的优化动力学模型,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述获取无人艇的目标状态数据,包括:
4.根据权利要求3所述的方法,其特征在于,所述变分自编码器网络包括编码子网络和解码子网络,所述将所述状态数据输入至预选训练好的变分自编码器网络进行预处理,得到所述目标状态数据,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标动力学模型控制所述无人艇进行运动,包括:
6.根据权利要求5所述的方法,其特征在于,所述约束条件包括一致性条件线性化矩阵、成本函数线性化矩阵、连续化条件线性化矩阵。
7.一种融合深度学习的无人艇模型预测控制装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种融合深度学习的无人艇模型预测控制方法和装置,该方法通过获取无人艇的目标状态数据,然后根据目标状态数据构建无人艇的优化动力学模型,以及根据优化动力学模型对无人艇的初始动力学模型进行优化,得到目标动力学模型,再根据目标动力学模型控制无人艇进行运动。上述方法通过优化动力学模型对现有的初始动力学模型进行优化,得到目标动力学模型,相比于现有的动力学模型,上述方法中利用优化后的目标动力学模型进行无人艇控制时,能够准确的实现无人艇的控制,可以一定程度上提高无人艇的动力学模型的控制精度。
技术研发人员:宫新乐,张浩东,李星宇,钟志华
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!