无人驾驶车辆远程控制方法、装置、电子设备及存储介质与流程
本发明涉及无人驾驶,尤其涉及一种无人驾驶车辆远程控制方法、装置、电子设备及存储介质。
背景技术:
1、自动驾驶技术融合了智能联网、人工智能感知与决策、雷达定位与感知数据融合、高精地图定位、车辆传感监控等技术,使得车辆可以在无人干预的情况下行驶,近年来随着自动驾驶技术的发展,无人公交、无人出租车等智能交通工具逐渐开始运营。
2、然而,由于自动驾驶系统以及实际运营路段的路况具有较高的复杂度,通常会针对无人驾驶车辆配备安全员以处理突发异常问题,产生了较高的人力成本的同时,也不利于记录异常问题发生时车辆的运行状态以及路况,不利于后续自动驾驶系统的迭代升级;由于人为对车辆进行监控或者通过显示器同时监控多个车辆的运行状况,这就造成无法兼顾多个无人驾驶车辆的监控,导致无法准确判断无人驾驶车辆的状态与行驶路况环境,从而造成无人驾驶车辆处理不及时的问题。
技术实现思路
1、本发明提供了一种无人驾驶车辆远程控制方法、装置、电子设备及存储介质,以解决无法兼顾多个无人驾驶车辆的监控,导致无法准确判断无人驾驶车辆的状态与行驶路况环境,从而造成无人驾驶车辆处理不及时的问题。
2、根据本发明的一方面,提供了一种无人驾驶车辆远程控制方法,包括:
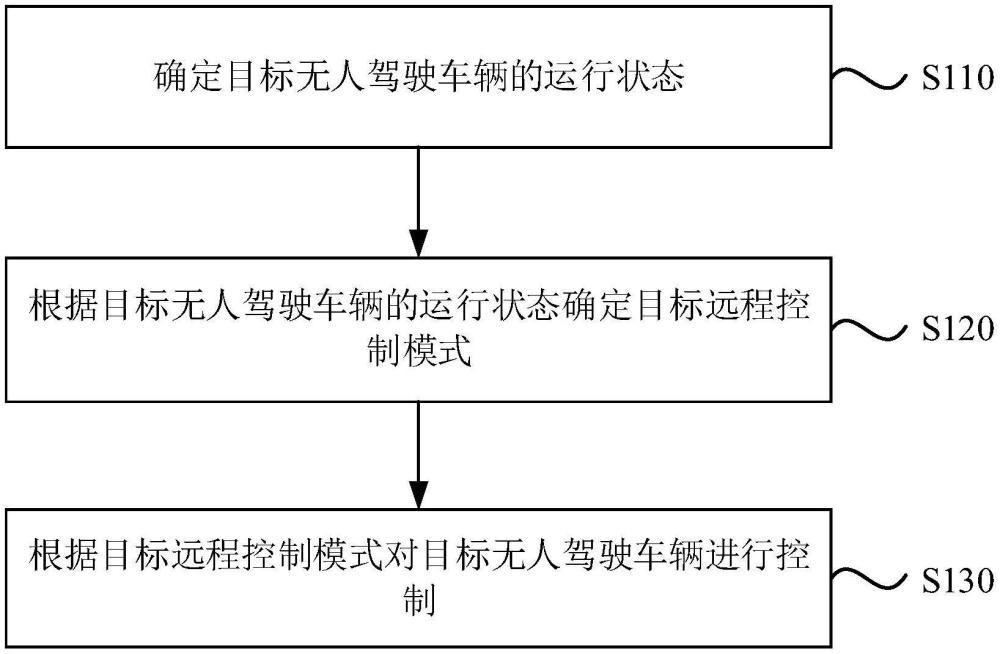
3、确定目标无人驾驶车辆的运行状态,所述目标无人驾驶车辆的运行状态用于对所述目标无人驾驶车辆异常运行状态进行描述,所述目标无人驾驶车辆的异常运行状态包括:设备故障状态与运行故障状态,所述设备故障状态为目标无人驾驶车辆在运行过程中软件或者硬件发生故障时的状态,所述运行故障状态为目标无人驾驶车辆在运行过程中遇到无法通过路障时的状态;
4、根据所述目标无人驾驶车辆的运行状态确定目标远程控制模式,所述目标远程控制模式为对目标无人驾驶车辆进行远程控制的模式,所述目标远程控制模式包括:第一控制模式和第二控制模式,所述第一控制模式为通过远程控制座舱直接对目标无人驾驶车辆进行远程控制的模式,所述第二控制模式为通过接管判定模块触发远程控制,并通过远程控制座舱对目标无人驾驶车辆进行远程控制的模式;
5、根据所述目标远程控制模式对所述目标无人驾驶车辆进行控制。
6、根据本发明的另一方面,提供了一种目标无人驾驶车辆远程控制装置,包括:
7、运行状态确定模块,用于确定目标无人驾驶车辆的运行状态,所述目标无人驾驶车辆的运行状态用于对所述目标无人驾驶车辆异常运行状态进行描述,所述目标无人驾驶车辆的异常运行状态包括:设备故障状态与运行故障状态,所述设备故障状态为目标无人驾驶车辆在运行过程中软件或者硬件发生故障时的状态,所述运行故障状态为目标无人驾驶车辆在运行过程中遇到无法通过路障时的状态;
8、控制模式确定模块,用于根据所述目标无人驾驶车辆的运行状态确定目标远程控制模式,所述目标远程控制模式为对目标无人驾驶车辆进行远程控制的模式,所述目标远程控制模式包括:第一控制模式和第二控制模式,所述第一控制模式为通过远程控制座舱直接对目标无人驾驶车辆进行远程控制的模式,所述第二控制模式为通过接管判定模块触发远程控制,并通过远程控制座舱对目标无人驾驶车辆进行远程控制的模式;
9、控制模块,用于根据所述目标远程控制模式对所述目标无人驾驶车辆进行控制。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的无人驾驶车辆远程控制方法。
14、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的无人驾驶车辆远程控制方法。
15、本发明实施例的技术方案,通过目标无人驾驶车辆的运行状态确定目标远程控制模式,根据目标远程控制模式对目标无人驾驶车辆进行控制,能够及时根据目标无人驾驶车辆的运行状态匹配对应的控制模式对目标无人驾驶车辆进行控制,提高了目标无人驾驶车辆行驶的安全性。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种无人驾驶车辆远程控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定目标无人驾驶车辆的运行状态,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述目标无人驾驶车辆车身周围预设范围内的环境数据确定所述目标无人驾驶车辆是否遇到路障,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述目标无人驾驶车辆的运行状态确定目标远程控制模式,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标远程控制模式对所述目标无人驾驶车辆进行控制,包括:
6.根据权利要求5所述的方法,其特征在于,所述若需要,则所述目标无人驾驶车辆进入第二控制模式,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述目标远程控制模式对所述目标无人驾驶车辆进行控制后,包括:
8.一种目标无人驾驶车辆远程控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的目标无人驾驶车辆远程控制方法。
技术总结
本发明公开了一种无人驾驶车辆远程控制方法、装置、电子设备及存储介质。该方法包括:确定目标无人驾驶车辆的运行状态;根据目标无人驾驶车辆的运行状态确定目标远程控制模式;根据目标远程控制模式对目标无人驾驶车辆进行控制。该方法通过目标无人驾驶车辆的运行状态确定目标远程控制模式,根据目标远程控制模式对目标无人驾驶车辆进行控制,能够及时根据目标无人驾驶车辆的运行状态匹配对应的控制模式对目标无人驾驶车辆进行控制,提高了目标无人驾驶车辆行驶的安全性。
技术研发人员:孙高鹏,黄硕,周琳,刘慧刚,王红良
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!