一种电控手柄死区参数标定的方法及系统与流程
本发明涉及一种电控手柄死区参数标定的方法及系统,属于电控手柄。
背景技术:
1、手柄是实现工程机械人机交互的关键装置,其操控性能直接影响主机体验。总线型手柄节约线束且差分信号可靠,霍尔型非接触测量使用寿命长,总线输出霍尔型手柄具有更好的性能和价值。电控手柄使用can输出手柄的工作行程信号,多采用sae j1939协议(美国汽车工程协会 j1939),少数采用定制化的canopen协议,canopen协议是一种架构在控制局域网路(controller area network,can)上的高层通讯协定。
2、根据手柄的不同工作场景和用户需求,需要配置手柄的中位死区和饱和死区,中位死区的范围对手柄开启响应速度有影响,且中位死区可以防止车辆振动对手柄误操作的影响;饱和死区与手柄的二次行程功能相关。
3、电控手柄在实际操控过程中存在死区等非线性特性,该特性对操控的精准性产生直接的影响。
4、因此,手柄在生产阶段需要根据手柄功能调试标定手柄的中位死区、饱和死区;测量手柄的线性度指标,需要配备相应的标定台、标定设备及操作人员。
5、现有的关于手柄标定的方法多采取根据特定位置,如中位、最大位、最小位,采用电位计或霍尔芯片感应手柄工作角度输出相应的电压值,手柄内的mcu进行电压采集,采集到的电压模拟信号在给定范围内,则认为标定合格。对于死区的设置方法,手柄在死区范围内的电压阈值的获取,需要借助标定台,让手柄静止在指定角度,mcu进行电位计或霍尔芯片输出电压的采集,该方法对标定台的工作精度以及安装工装有要求,难度大成本高;对目标位置点电压值进行n次采样值,均值为目标值,方差为目标值的死区范围,该方法并未考虑目标位置的死区范围的大小与摇杆的工作角度没有对应关系。
6、因此,本领域技术人员急需要解决电控手柄死区参数标定存在的死区不准确、标定过程麻烦,不易操作,标定过程耗时长等问题。
技术实现思路
1、目的:为了克服现有技术中存在的不足,本发明提供一种电控手柄死区参数标定的方法及系统。
2、技术方案:为解决上述技术问题,本发明采用的技术方案为:
3、第一方面,一种电控手柄死区参数标定的方法,具体包括:
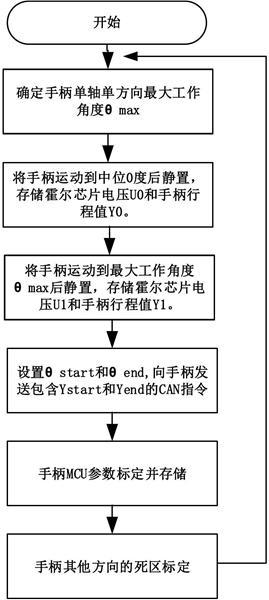
4、步骤1:获取手柄单方向最大工作角度θmax。
5、步骤2:获取手柄运动到中位0度时,对应的霍尔芯片输出电压u0以及can信号手柄行程值y0。
6、步骤3:获取手柄运动到单方向最大工作角度θmax度时,对应的霍尔芯片输出电压u1以及can信号手柄行程值y1。
7、步骤4:获取中位死区结束、线性行程开启角度θstart以及线性行程结束、饱和死区开启角度θend。
8、步骤5:根据θmax、u0、y0、u1、y1、θstart以及θend,计算参数、,得到标定后的u与y的函数模型。
9、作为优选方案,所述手柄单方向,包括:单轴手柄的前方向和后方向,或者单轴手柄的左方向和右方向。
10、作为优选方案,所述手柄单方向,包括:双轴手柄的前方向、后方向、左方向和右方向。
11、作为优选方案,所述手柄单方向,包括:多轴手柄的任一方向。
12、作为优选方案,所述手柄单方向最大工作角度θmax通过查询手柄产品手册获取。
13、作为优选方案,手柄行程值根据sae j1939协议获取。
14、作为优选方案,所述θstart、θend根据工作场景需求调整。
15、作为优选方案,所述步骤5,具体包括:
16、步骤5.1:根据y1、θmax和θstart,计算θstart对应的手柄行程值ystart,计算公式如下:
17、
18、步骤5.2:根据y1、θmax和θend,计算θend对应的手柄行程值yend,计算公式如下:
19、
20、步骤5.3:根据u0、u1、y1和ystart,计算ystart对应的输出电压ustart,计算公式如下:
21、
22、步骤5.4:根据u0、u1、y1和yend,计算yend对应的输出电压uend,计算公式如下:
23、
24、步骤5.5:根据y1、uend、ustart,计算参数、,计算公式如下:
25、
26、
27、步骤5.6:根据参数、,得到标定后的u与y的函数模型,计算公式如下:
28、
29、其中,y表示can信号手柄行程值,u表示霍尔芯片输出电压。
30、第二方面,一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现如第一方面中任一所述的一种电控手柄死区参数标定的方法。
31、第三方面,一种计算机设备,包括:
32、存储器,用于存储指令。
33、处理器,用于执行所述指令,使得所述计算机设备执行如第一方面中任一所述的一种电控手柄死区参数标定的方法的操作。
34、有益效果:本发明提供的一种电控手柄死区参数标定的方法及系统,针对电控手柄,包括但不限于单轴、双轴、多轴,采用软件标定算法,可以根据用户需求,结合工作场景,快速标定手柄死区参数,优化线性度,通过在muc中获取电压与行程的映射关系,实现手柄操控角度和手柄can输出手柄行程信号的映射关系;本发明可提高手柄的性能和操作舒适性,同时手柄标定流程简单,易操作,可缩短手柄在生产阶段的调试工时,具有较高的应用价值。
技术特征:
1.一种电控手柄死区参数标定的方法,其特征在于:具体包括:
2.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述手柄单方向,包括:单轴手柄的前方向和后方向,或者单轴手柄的左方向和右方向。
3.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述手柄单方向,包括:双轴手柄的前方向、后方向、左方向和右方向。
4.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述手柄单方向,包括:多轴手柄的任一方向。
5.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述手柄单方向最大工作角度θmax通过查询手柄产品手册获取。
6.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:手柄行程值根据sae j1939协议获取。
7.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述θstart、θend根据工作场景需求调整。
8.根据权利要求1所述的一种电控手柄死区参数标定的方法,其特征在于:所述步骤5,具体包括:
9.一种计算机可读存储介质,其特征在于:其上存储有计算机程序,该计算机程序被处理器执行时,实现如权利要求1至8中任一所述的一种电控手柄死区参数标定的方法。
10.一种计算机设备,其特征在于:包括:
技术总结
本发明公开了一种电控手柄死区参数标定的方法及系统,针对电控手柄,包括但不限于单轴、双轴、多轴,采用软件标定算法,可以根据用户需求,结合工作场景,快速标定手柄死区参数,优化线性度,通过在MUC中获取电压与行程的映射关系,实现手柄操控角度和手柄CAN输出手柄行程信号的映射关系;本发明可提高手柄的性能和操作舒适性,同时手柄标定流程简单,易操作,可缩短手柄在生产阶段的调试工时,具有较高的应用价值。
技术研发人员:张桓,安卡,刘佩军
受保护的技术使用者:江苏汇智高端工程机械创新中心有限公司
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!