蝶阀开度的控制方法、控制器、系统和存储介质与流程
本公开涉及气体压力控制,尤其涉及一种蝶阀开度的控制方法、控制器、系统和存储介质。
背景技术:
1、蝶阀是能够改变气流方向、调节气流量大小、切断或接通管路的真空系统元件,由于真空蝶阀具有运行稳定、响应快等特点,因此其被广泛应用控制腔体的内部压力。
2、现有技术中,通过比例、积分和微分(proportion integral differential,pid)控制算法来计算蝶阀的阀门开度,然后根据计算出的蝶阀开度值调节蝶阀的阀门位置,进而实现腔体内部压力的控制。
3、然后,在气体压力控制系统中,由于压力控制具有非线性、纯滞后等特性,且气体具有可压缩性和运用环境的多变性,大大降低了其可控性,因此,传统pid控制算法不适用于高精度的气体压力控制。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种蝶阀开度的控制方法、控制器、系统和存储介质,引用模糊处理和修正参数对pid参数进行修正,解决气体压力控制系统中的非线性、滞后性等特性,和气体的可压缩性对控制系统的影响,提高气体压力的控制精度。
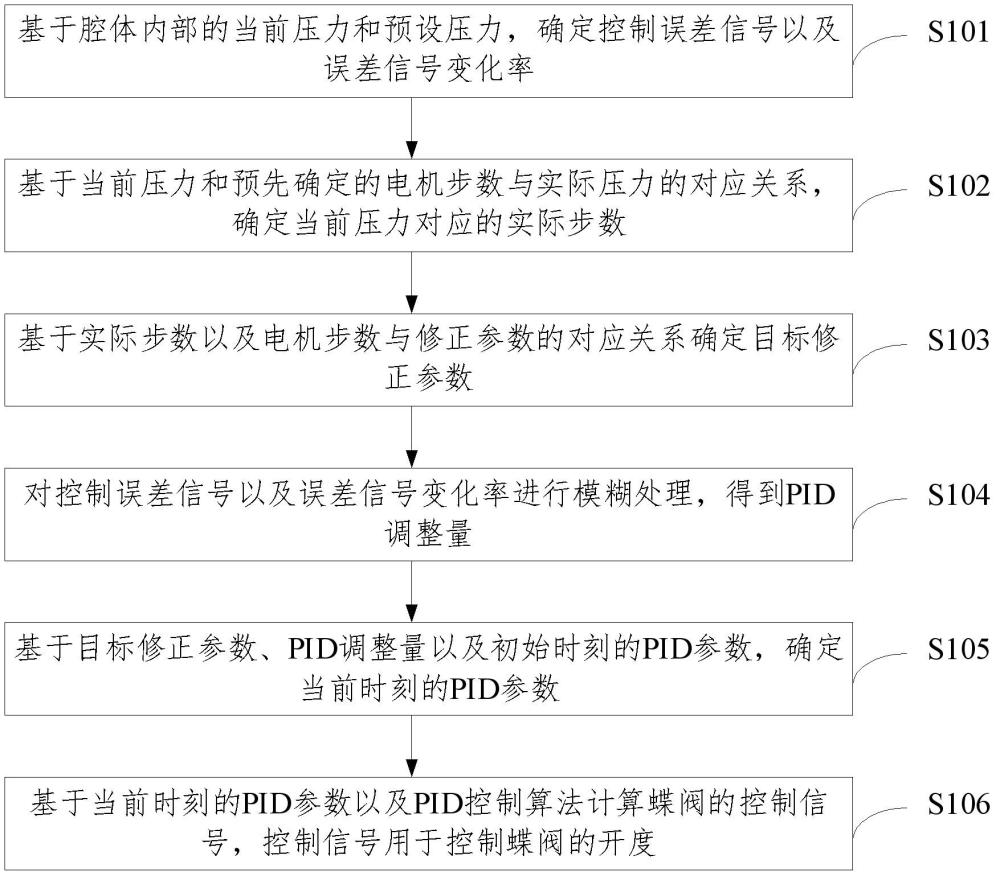
2、第一方面,本公开提供了一种蝶阀开度的控制方法,蝶阀与腔体连接,该方法包括:基于腔体内部的当前压力和预设压力,确定控制误差信号以及误差信号变化率;基于当前压力和预先确定的电机步数与实际压力的对应关系,确定当前压力对应的实际步数;基于实际步数以及电机步数与修正参数的对应关系确定目标修正参数;对控制误差信号以及误差信号变化率进行模糊处理,得到pid调整量;基于目标修正参数、pid调整量以及初始时刻pid参数,确定当前时刻的pid参数;基于当前时刻的pid参数以及pid控制算法计算蝶阀的控制信号,控制信号用于控制蝶阀的开度。
3、第二方面,本公开提供了一种蝶阀开度的控制装置,该装置包括:误差信号确定模块,用于基于腔体内部的当前压力和预设压力,确定控制误差信号以及误差信号变化率;实际步数确定模块,用于基于当前压力和预先确定的电机步数与实际压力的对应关系,确定当前压力对应的实际步数;目标修正参数确定模块,用于基于实际步数以及电机步数与修正参数的对应关系确定目标修正参数;pid调整量模块,用于对控制误差信号以及误差信号变化率进行模糊处理,得到pid调整量;pid参数确定模块,用于基于目标修正参数、pid调整量以及初始时刻pid参数,确定当前时刻的pid参数;控制信号确定模块,用于基于当前时刻的pid参数以及pid控制算法计算蝶阀的控制信号,控制信号用于控制蝶阀的开度。
4、第三方面,本公开提供了一种蝶阀开度控制器,该控制器包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如上述第一方面中的蝶阀开度的控制方法。
5、第四方面,本公开提供了一种蝶阀开度的控制系统,所述蝶阀开度的控制系统包括:腔体、压力传感器、蝶阀开度控制器、步进电机、蝶阀其中,所述腔体,用于存储气体;所述压力传感器,用于监测所述腔体内的当前压力,并向所述蝶阀开度控制器发送所述当前压力;所述蝶阀开度控制器,用于基于所述当前压力执行如上述第一方面中任一项所述的蝶阀开度的控制方法,得到所述蝶阀的控制信号;所述步进电机,用于基于所述控制信号带动所述蝶阀的阀门转动;所述蝶阀,用于基于所述蝶阀的阀门位置控制进入所述腔体内部的气体流量。
6、第五方面,本公开提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一方面中的蝶阀开度的控制方法。
7、本公开实施例提供的技术方案与现有技术相比具有如下优点:
8、本公开实施例提供了一种蝶阀开度的控制方法、控制器、系统和存储介质,该方法包括:基于腔体内部的当前压力和预设压力,确定控制误差信号以及误差信号变化率;基于当前压力和预先确定的电机步数与实际压力的对应关系,确定当前压力对应的实际步数;基于实际步数以及电机步数与修正参数的对应关系确定目标修正参数;对控制误差信号以及误差信号变化率进行模糊处理,得到pid调整量;基于目标修正参数、pid调整量以及初始时刻pid参数,确定当前时刻的pid参数;基于当前时刻的pid参数以及pid控制算法计算蝶阀的控制信号,控制信号用于控制蝶阀的开度。由于引用模糊处理和修正参数对pid参数进行修正,解决气体压力控制系统中的非线性、滞后性等特性,和气体的可压缩性对控制系统的影响,提高气体压力的控制精度。
技术特征:
1.一种蝶阀开度的控制方法,其特征在于,所述蝶阀与腔体连接,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述当前压力和预先确定的电机步数与实际压力的对应关系,确定所述当前压力对应的实际步数,包括:
3.根据权利要求2所述的方法,其特征在于,所述常量参数a、b、c通过粒子群算法以及所述电机最大步数对应的实际压力确定。
4.根据权利要求1所述的方法,其特征在于,所述电机步数与修正参数的对应关系,包括:所述修正参数与所述电机步数成正比例关系。
5.根据权利要求4所述的方法,其特征在于,所述电机步数与修正参数的对应关系通过修正函数的形式表示;
6.根据权利要求1所述的方法,其特征在于,所述对所述控制误差信号以及所述误差信号变化率进行模糊处理,得到pid调整量,包括:
7.根据权利要求1所述的方法,其特征在于,所述当前时刻的pid参数是所述目标修正参数与第一和值的乘积,所述第一和值为所述初始时刻pid参数与pid调整量的和值。
8.一种蝶阀开度控制器,其特征在于,所述控制器包括:
9.一种蝶阀开度的控制系统,其特征在于,所述蝶阀开度的控制系统包括:腔体、压力传感器、蝶阀开度控制器、步进电机、蝶阀;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的蝶阀开度的控制方法。
技术总结
本公开涉及气体压力控制技术领域,尤其提供一种蝶阀开度的控制方法、控制器、系统和存储介质,该方法包括:基于腔体内部的当前压力和预设压力,确定控制误差信号以及误差信号变化率;基于当前压力和预先确定的电机步数与实际压力的对应关系,确定当前压力对应的实际步数;基于实际步数以及电机步数与修正参数的对应关系确定目标修正参数;对控制误差信号以及误差信号变化率进行模糊处理,得到PID调整量;基于目标修正参数、PID调整量以及初始时刻PID参数,确定当前时刻的PID参数;基于当前时刻的PID参数以及PID控制算法计算蝶阀的控制信号,控制信号用于控制蝶阀的开度。可以提高气体压力的控制精度。
技术研发人员:罗磊,托乎提努尔,胡强,何斌,郭晓东,苏艮英,刘凯翔
受保护的技术使用者:季华实验室
技术研发日:
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!