本申请属于人工智能领域,尤其涉及一种运动规划确定方法、装置、设备、介质及产品。
背景技术:
1、运动对象运动规划和控制,常应用于制造、医疗保健、农业等多个领域等领域。然而,在部分或完全未知的环境中,特别是在被许多障碍物占据的特定区域中,运动对象的导航仍然存在问题。
2、在现有技术中,运动对象的运动规划通常被拆解成两部分,包括规划和控制。规划是在给定的地图中,先搜索出能够到达目标位置的离散路径点,然后再将这些路径点进行参数化来得到轨迹。在获得轨迹之后再通过使用常用的控制方式来控制运动对象跟踪这个轨迹。另外一些基于局部反馈控制的方式,多用于进行局部避障。该方式能够结合传感器数据,先将得到的传感器数据进行处理,然后根据这些信息求出可行的控制量。但是上述运动规划方式应用于复杂环境时需要预先知道障碍物形状并需要大量的计算支持提取生成路径图,算繁琐导致导航的实时性降低。
3、由此可见,如何设计出一种在面对复杂环境时计算负载低、实时性好的运动对象运动规划方法,成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本申请实施例提供一种运动规划确定方法、装置、设备、介质及产品,能够面对复杂环境时实现计算负载低、实时性好的运动规划。
2、一方面,本申请实施例提供一种运动规划确定方法,方法包括:
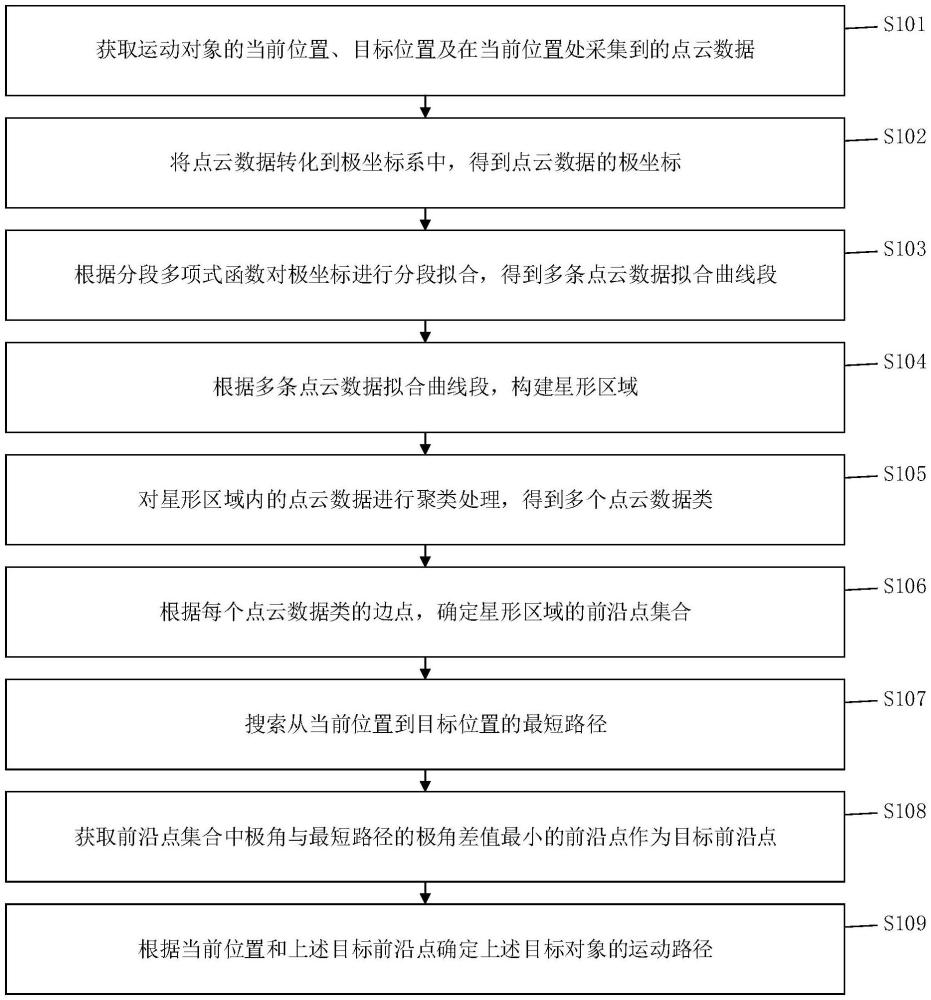
3、获取运动对象的当前位置、目标位置及在上述当前位置处采集到的点云数据;
4、将上述点云数据转化到极坐标系中,得到点云数据的极坐标;
5、根据分段多项式函数对上述极坐标进行分段拟合,得到多条点云数据拟合曲线段;
6、根据上述多条点云数据拟合曲线段,构建星形区域,上述星形区域内存在至少一个特征点,上述特征点到上述星形区域内任意一点的连线仍然在上述星形区域内;
7、对上述星形区域内的点云数据进行聚类处理,得到多个点云簇;
8、根据每个上述点云簇的边点,确定上述星形区域的前沿点集合;
9、搜索从当前位置到上述目标位置的最短路径;
10、从当前位置沿星形区域构建成的星状图到目标位置由一系列前沿点组成的最短路径;
11、根据上述当前位置和上述局部前沿点确定上述目标对象的运动规划。
12、另一方面,本申请实施例提供了一种运动规划确定装置,装置包括:
13、获取模块,用于获取运动对象的当前位置、目标位置及在上述当前位置处采集到的点云数据;
14、极坐标转换模块,用于将上述点云数据转化到极坐标系中,得到点云数据的极坐标;
15、拟合模块,用于根据分段多项式函数对上述极坐标进行分段拟合,得到多条点云数据拟合曲线段;
16、星形区域构建模块,用于根据上述多条点云数据拟合曲线段,构建星形区域,上述星形区域内存在至少一个特征点,上述特征点到上述星形区域内任意一点的连线仍然在上述星形区域内;
17、聚类模块,用于对上述星形区域内的点云数据进行聚类处理,得到多个点云簇;
18、前沿点确定模块,用于根据每个上述点云簇的边点,确定上述星形区域的前沿点集合;
19、最短路径确定模块,用于搜索从当前位置到上述目标位置的最短路径;
20、局部前沿点确定模块,从当前位置沿星形区域构建成的星状图到目标位置由一系列前沿点组成的最短路径;
21、运动规划确定模块,用于根据上述当前位置和上述局部前沿点确定上述目标对象的运动规划。
22、再一方面,本申请实施例提供了一种运动规划确定设备,设备包括:
23、处理器以及存储有计算机程序指令的存储器;
24、上述处理器执行上述计算机程序指令时实现上述的运动规划确定方法。
25、再一方面,本申请实施例提供了一种计算机存储介质,上述计算机可读存储介质上存储有计算机程序指令,上述计算机程序指令被处理器执行时实现上述的运动规划确定方法。
26、再一方面,本申请实施例提供了一种计算机程序产品,上述计算机程序产品中的指令由电子设备的处理器执行时,使得上述电子设备执行上述的运动规划确定方法。
27、本申请实施例的运动规划确定方法、装置、设备、介质及产品,能够通过获取运动对象的当前位置、目标位置及当前位置的点云数据,确定对应的星状区域,再得到星形区域的局部前沿点。也即直接获取可以通行的位置,不必对障碍物进行检测,相比于现有技术不需要提前获取障碍物的形状。然后将局部前沿点与当前位置的路径作为运动目标路径。实时生成路径规划,不必提前生成路径地图,减轻了计算负担,提高了计算效率,使得一些小的设备也能利用本申请中的规划方式。
技术特征:1.一种运动规划确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据每个所述点云簇的边点,确定所述星形区域的前沿点集合,包括:
3.根据权利要求1所述的方法,其特征在于,在得到从当前位置沿星形区域构建成的星状图到目标位置由一系列前沿点组成的最短路径的第一个前沿点作为局部前沿点之后,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述根据分段多项式函数对所述极坐标进行分段拟合,得到多条点云数据拟合曲线段,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述当前位置和所述局部前沿点确定所述目标对象的运动方向之后,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述m(p)的表达式如下:
7.根据权利要求5所述的方法,其特征在于,所述星形区域为多个,所述根据所述第二速度向量引导所述运动对象从所述当前位置运动到所述局部前沿点,包括:
8.根据权利要求7所述的方法,其特征在于,所述根据距离,确定每个星形区域的权重,包括:
9.根据权利要求7所述的方法,其特征在于,所述距离的计算公式如下:
10.一种运动规划确定装置,其特征在于,所述装置包括:
11.一种运动规划确定设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器;
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如权利要求1-9任意一项所述的运动规划确定方法。
13.一种计算机程序产品,其特征在于,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如权利要求1-9任意一项所述的运动规划确定方法。
技术总结本申请提供了一种运动规划确定方法、装置、设备、介质及产品,其中运动规划确定方法包括:将点云数据转化到极坐标系中,得到点云数据的极坐标;根据分段多项式函数对极坐标进行分段拟合,得到多条点云数据拟合曲线段,构建星形区域;并对星形区域内的点云数据进行聚类处理,得到多个点云簇;根据每个点云簇的边点,确定星形区域的前沿点集合;搜索从当前位置沿星形区域构建成的星状图到目标位置由一系列前沿点组成的最短路径;然后获取将该路径中的第一个路径点作为局部前沿点;根据当前位置和局部前沿点完成目标对象的局部导航。实时反应式控制,不必提前生成路径和地图,减轻计算负担提高计算效率,使得小的设备也能利用本申请中的控制方式。
技术研发人员:陈凯,马骏
受保护的技术使用者:香港科技大学(广州)
技术研发日:技术公布日:2024/10/31