基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法
本发明涉及电机控制与机器人,具体涉及一种基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法。
背景技术:
1、工业机器人技术被广泛地应用到交通运输、智能制造、航空航天等领域的喷涂、搬运任务等。在打磨、抛光等作业中,控制的主要任务是机器人对未知环境的适应及接触力控制。但在实际情况下,操作环境的相关参数是较难直接测量,并且零件刚度和表面位置变化,导致接触环境动态变化,难以建立准确的物理模型。
2、当前研究已提出了多种控制方法:采用扩展卡尔曼滤波估计环境刚度,计算出参考轨迹,并设计了最优的lqr力交互模型;构造控制器,灵活地修改参考轨迹,能够控制机器人与环境之间的交互力;提出改进的q-learning方法,调整机器人期望轨迹,对未知环境进行力交互;在阻抗控制基础上,设计在线轨迹生成器,对环境进行跟踪柔顺接触。此外,有研究成果根据环境参数变化,动态地改变阻抗参数,以实现对环境进行力控制:提出基于近似动态反演和建模不确定性的阻抗控制方法,验证了pid型可变阻抗误差的稳定性;基于模糊变阻抗控制器,将接触力、位置和速度误差作为输入,实时调整阻抗参数,实现对环境阻抗的自适应;针对环境参数动态变化导致力跟踪效果差的问题,采用rbf神经网络自适应调整阻抗参数;提出模糊神经网络控制框架,将其应用于与未知环境交互的约束控制器,自适应阻抗参数应对与环境相互作用的最优问题;利用模糊控制器选出最优的阻抗参数,实现机器人末端的位置和操作力之间的动态平衡关系。然而,以上方法均是从参考轨迹不准确、模型不确定性及阻抗参数不适合等方向进行改进研究,提高力控制的自适应调整能力,但系统的控制精度却有待进一步提高。
技术实现思路
1、本发明所要解决的是工业机器人在打磨过程中环境刚度和位置未知,传统的阻抗控制中的刚度系数和阻尼系数难以准确获得,从而直接影响打磨质量的问题,提供一种基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法。
2、为解决上述问题,本发明是通过以下技术方案实现的:
3、基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法,包括步骤如下:
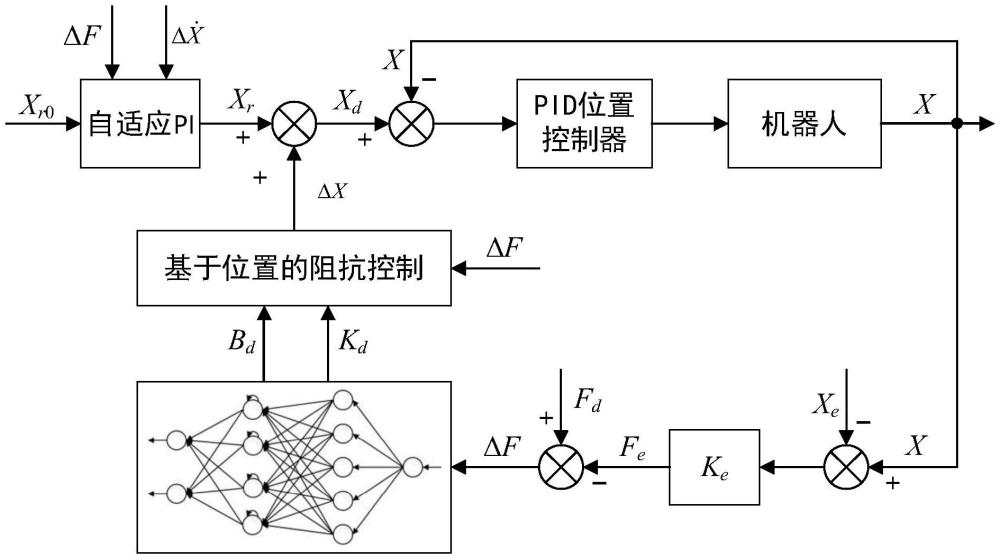
4、步骤1、根据力传感器所采集到的机器人末端与环境之间的接触力fe和设定的机器人末端与环境之间的期望力fd,计算机器人末端与环境之间的接触力误差δf,其中δf=fd-fe;
5、步骤2、构建刚度阻尼特征的神经网络模型;该刚度阻尼特征的神经网络模型由输入层、第一隐含层、第二隐含层和输出层构成;其中第一隐含层为刚度阻尼神经网络,第二隐含层为递归神经网络;
6、步骤3、将步骤1所得到的接触力误差δf送入到步骤2所构建的刚度阻尼特征的神经网络模型中,得到阻尼系数bd和刚度系数kd;
7、步骤4、将步骤1所得到的接触力误差δf、步骤3所得到的阻尼系数bd和刚度系数kd、以及设定的质量系数md一并送入到基于位置的阻抗控制模型中,计算接触力误差δf对应的位置误差δx;其中基于位置的阻抗控制模型为:
8、
9、步骤5、在初始参考轨迹xr0的基础上,基于步骤1所得到的接触力误差δf对参考轨迹进行自适应pi补偿,得到当前参考轨迹xr,其中:
10、
11、式中,kp为比例项系数,ki为积分项系数;
12、步骤6、根据步骤4所得到的位置误差δx与步骤5得到的当前参考轨迹xr,计算机器人的位置控制量xd,其中xd=xr+δx;
13、步骤7、利用步骤6所得的位置控制量xd与位置传感器所采集到的机器人的实际位置x的偏差进行pid位置控制,实现机器人接触力的控制。
14、上述步骤2中,刚度阻尼特征的神经网络模型的数学描述为:
15、
16、式中,fi(k)为第一隐含层的第i个神经元在k时刻的输出,ci和bi分别为第一隐含层的第i个神经元的高度和宽度,δf为接触力误差;nj(k)为第二隐含层的第j个神经元在k时刻的输入,wij为第一隐含层的求和权重系数;yj(k)为第二隐含层的第j个神经元在k时刻的中间输出,yj(k-1)为第二隐含层的第j个神经元在k-1时刻的中间输出,uj为第二隐含层的第j个神经元的滤波权重系数,bj为第二隐含层的第j个神经元的偏置;zj(k)为第二隐含层的第j个神经元在k时刻的输出;bd为阻尼系数,wj1为第二隐含层的第一求和权重系数;kd为刚度系数,wj2为第二隐含层的第二求和权重系数;p为第一隐含层的神经元数量,q为第二隐含层的神经元数量。
17、上述步骤5中,积分项系数ki为:
18、
19、式中,ki0为积分项系数初值,λ为调整因子,δf为接触力误差,为位置误差δx的一次微分。
20、与现有技术相比,本发明针对由于环境参数未知导致参考轨迹不易确定问题,构造了一个自适应pi(proportional-integral,比例与积分)控制器,进行参考轨迹补偿,减少力跟踪的稳态误差;此外,根据力误差对刚度系数及阻尼系数的统一调节规律即刚度阻尼特征,设计了一个描述接触力误差与刚度阻尼特征关系的激活函数,构建自适应刚度阻尼特征神经网络模型。本发明基于参考轨迹补偿与刚度阻尼特征神经网络模型,实现自适应阻抗控制。
技术特征:
1.基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法,其特征是,包括步骤如下:
2.根据权利要求1所述的基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法,其特征是,步骤2中,刚度阻尼特征的神经网络模型的数学描述为:
3.根据权利要求1所述的基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法,其特征是,步骤5中,积分项系数ki为:
技术总结
本发明公开一种基于刚度阻尼特征的神经网络建模的自适应阻抗控制方法,针对由于环境参数未知导致参考轨迹不易确定问题,构造了一个自适应PI控制器,进行参考轨迹补偿,减少力跟踪的稳态误差;此外,根据力误差对刚度系数及阻尼系数的统一调节规律即刚度阻尼特征,设计了一个描述接触力误差与刚度阻尼特征关系的激活函数,构建自适应刚度阻尼特征神经网络模型。本发明基于参考轨迹补偿与刚度阻尼特征神经网络模型,实现自适应阻抗控制。
技术研发人员:党选举,黄伟健,原翰玫
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!