一种加工控制方法及装置与流程
本公开涉及生产线,更具体地,本公开涉及一种加工控制方法及装置。
背景技术:
1、随着现代工业的发展,自动化设备在工业生产领域得到广泛的应用。在生产过程中,通常需要机床对工件进行加工。
2、但是,现有的生产线中,通常是由工作人员指定加工工件的机床,导致机床的任务负荷差异较大,部分机床待机造成机床利用率低下,机床单位产值低。
技术实现思路
1、本公开的一个目的是提供一种加工控制方法及装置。
2、根据本公开的第一方面,提供了一种加工控制方法,包括:
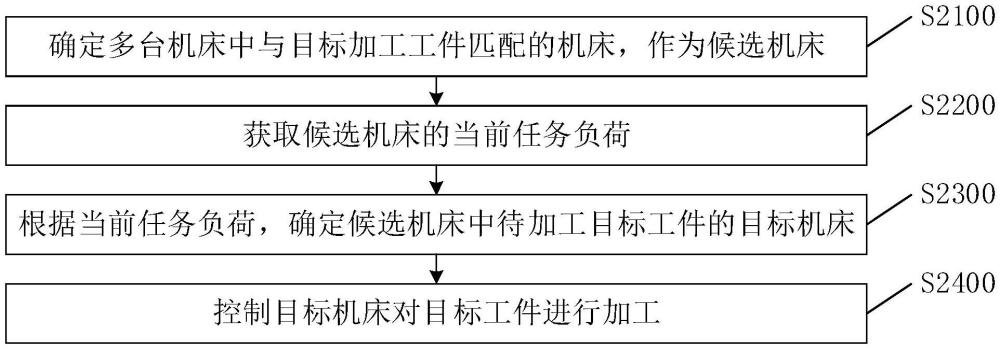
3、确定多台机床中与目标加工工件匹配的机床,作为候选机床;
4、获取所述候选机床的当前任务负荷;
5、根据所述当前任务负荷,确定所述候选机床中待加工所述目标工件的目标机床;
6、控制所述目标机床对所述目标工件进行加工。
7、可选的,所述方法还包括:
8、获取所述候选机床所装载刀具的刀具信息、所述目标工件的目标加工任务,还根据所述刀具信息和所述目标加工任务确定所述目标机床。
9、可选的,所述还根据所述刀具信息和所述目标加工任务确定所述目标机床,包括:
10、根据所述当前任务负荷,确定所述候选机床的预计完成加工时间;
11、根据所述预计完成加工时间,确定所述候选机床的第一权重;
12、根据所述刀具信息和所目标加工任务,确定所述候选机床中刀具与所述加工任务的匹配度;
13、根据所述匹配度确定所述候选机床的第二权重;
14、根据所述第一权重和所述第二权重,确定所述候选机床中的目标机床。
15、可选的,所述根据所述第一权重和所述第二权重,确定所述候选机床中的目标机床,包括:
16、根据所述第一权重和所述第二权重,得到所述候选机床的第三权重;
17、确定第三权重最大的候选机床,作为所述目标机床。
18、可选的,所述方法还包括:
19、获取放置在工件料架上的目标工件的标识信息,根据所述标识信息确定所述目标工件的加工数据;所述加工数据包括加工用刀具、工件加工交期
20、确定与所述目标工件规格相同且无绑定工件的工装位置,作为目标工装位置;
21、根据所述工件料架和所述目标工装位置,创建第一搬运任务;
22、将所述第一搬运任务发送至第一机器人,以使所述第一机器人执行所述第一搬运任务,将所述目标工件由所述工件料架搬运至所述目标工装位置上。
23、可选的,所述方法还包括:
24、根据所述目标工件的加工数据生成所述目标工件的目标加工任务。
25、可选的,所述控制所述目标机床对所述目标工件进行加工之前,所述方法还包括:
26、在所述目标机床中为所述目标工件的至少一个加工程式匹配对应的目标刀具。
27、可选的,所述在所述目标机床中为所述目标工件的至少一个加工程式匹配对应的目标刀具,包括:
28、遍历所述至少一个加工程式,确定当前遍历的加工程式所对应的当前刀具类型;
29、确定所述目标机床上是否装配有与所述当前刀具类型相同的第一刀具;
30、在所述目标机床上装配有所述第一刀具的情况下,根据所述第一刀具的寿命信息,从所述第一刀具中匹配与所述当前遍历的加工程式对应的目标刀具,并继续执行遍历所述至少一个加工程式,确定当前遍历的加工程式所对应的当前刀具类型的步骤;
31、在所述目标机床上未装配有所述第一刀具的情况下,确定刀具料架上是否有与所述当前刀具类型相同的第二刀具;
32、在所述刀具料架上有所述第二刀具的情况下,控制第二机器人将所述第二刀具搬运、并装载至所述目标机床上,匹配为与所述当前遍历的加工程式对应的目标刀具,并继续执行遍历所述至少一个加工程式,确定当前遍历的加工程式所对应的当前刀具类型的步骤;
33、在所述刀具料架上没有所述第二刀具的情况下,发出报警信息,并停止遍历所述至少一个加工程式。
34、可选的,所述方法还包括:
35、响应于用户将与所述当前刀具类型相同的刀具装载至所述目标机床上的情况下所触发的第一操作,重新执行所述遍历所述至少一个加工程式,确定当前遍历的加工程式所对应的当前刀具类型的步骤;或者,
36、响应于用户将与所述当前刀具类型相同的刀具放至所述刀具料架上的情况下所触发的第二操作,继续执行所述确定刀具料架上是否有与所述当前刀具类型相同的第二刀具的步骤。
37、可选的,所述控制所述目标机床对所述目标工件进行加工,包括:
38、获取所述目标机床的状态;
39、在所述目标机床的状态满足加工条件的情况下,生成第二搬运任务,并将所述第二搬运任务发送至第二机器人,以使所述第二机器人执行所述第二搬运任务,将所述目标工件从目标工装位置上搬运至所述目标机床上;
40、将所述加工程式上传至与所述目标机床对应的目标路径下,并设置所述加工程式中的初始程式;
41、控制所述目标机床由所述初始程式开始执行所述加工程式,以对所述目标工件进行加工。
42、可选的,所述方法还包括:
43、获取所述机床的加工参数;
44、根据所述加工参数监测所述目标工件是否加工完成;
45、在所述目标工件加工完成的情况下,控制所述目标机床打开防护门;
46、生成第三搬运任务,并将所述第三搬运任务发送至所述第二机器人,以使所述第二机器人执行所述第三搬运任务,将所述目标工件从所述目标机床上搬运至所述目标工装位置上。
47、根据本公开的第二方面,提供了一种加工控制装置,包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于在所述计算机程序的控制下,执行根据本公开第一方面所述的方法。
48、通过本公开的实施例的加工控制方法,根据候选机床的当前任务负荷、目标工件的目标加工任务,确定候选机床中待加工目标工件的目标机床,并控制目标机床对目标工件进行加工,这样,可以使得目标工件完成加工时间的最早,提高机床的稼动率使得多个机床的任务负荷更加均衡,还可以提高目标工件的加工效率。
49、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种加工控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述还根据所述刀具信息和所述目标加工任务确定所述目标机床,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述第一权重和所述第二权重,确定所述候选机床中的目标机床,包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述控制所述目标机床对所述目标工件进行加工之前,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,所述在所述目标机床中为所述目标工件的至少一个加工程式匹配对应的目标刀具,包括:
9.根据权利要求8所述的方法,其特征在于,所述方法还包括:
10.根据权利要求1所述的方法,其特征在于,所述控制所述目标机床对所述目标工件进行加工,包括:
11.根据权利要求10所述的方法,其特征在于,所述方法还包括:
12.一种加工控制装置,包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于在所述计算机程序的控制下,执行根据权利要求1-11中任一项所述的方法。
技术总结
本公开提供了一种加工控制方法及装置,所述方法包括:确定多台机床中与目标加工工件匹配的机床,作为候选机床;获取所述候选机床的当前任务负荷、所述候选机床所装载刀具的刀具信息、所述目标工件的目标加工任务;根据所述当前任务负荷、所述刀具信息、所述目标加工任务,确定所述候选机床中待加工所述目标工件的目标机床;控制所述目标机床对所述目标工件进行加工。
技术研发人员:陈付梦,刘文帅,尹玮文,谭港,胡文基,汤小兵,王鑫岩
受保护的技术使用者:歌尔股份有限公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!