一种无人机导航定位系统的制作方法
本发明涉及无人机地面设施,尤其涉及一种无人机导航定位系统。
背景技术:
1、当前系留无人机技术发展迅速,被应用在各种领域,例如喷涂、灌溉和消防等,在工作过程中,作业环境等都对无人机的位置控制的精准性具备较高的要求,因此针对无人机的导航定位系统被人们所重视。
2、中国专利授权公告号:cn109250141a公开了一种多旋翼无人机配套的系留设备,包括系留模块端、系留地面端和平台端,所述系留模块端安装在平台端内部,所述系留地面端位于地面与220v交流电源电性连接;本发明使用了系留模块端,来替代原装的一个智能电池,接着将220v交流输送到飞机端,通过飞机端直接将220v交流转换成低压直流,大大降低了系留对地面端的依赖程度,不但成本降低了,使用的方便性也大大提高了,同时地面端的系留装置可以自动收放线,而且还能通过手机app来手动控制收放线,操作更加便捷。
3、但是,上述装置存在以下问题:对于作业精度需求较高的工作场景,由于无人机作业和飞行同时进行的复杂受力状态,不能在减小控制难度的同时保证无人机作业的定位精度。
技术实现思路
1、为此,本发明提供一种无人机导航定位系统,用以克服现有技术中由于无人机作业和飞行同时进行的复杂受力状态,不能在减小控制难度的同时保证无人机作业的定位精度的问题。
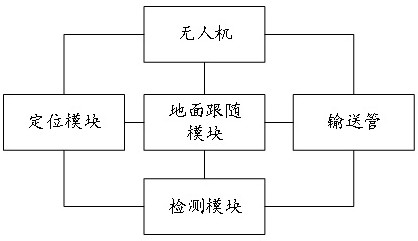
2、为实现上述目的,本发明提供一种无人机导航定位系统,包括:
3、无人机,用以向地面喷洒功能液体;
4、地面跟随模块,其与所述无人机连接,用以存储所述功能液体,以及向无人机输送电力,地面跟随模块包括限位环和转臂;
5、输送管,其分别与所述地面跟随模块和所述无人机连接且贯穿所述限位环,用以将地面跟随模块内的所述功能液体输送至无人机;
6、检测模块,包括沿周向设置在所述限位环上的用以检测所述输送管与限位环的碰撞次数的压力传感器,以及设置在所述输送管上与限位环所在平面相交位置,用以检测所述输送管在限位环内的移动路程的位移传感器;
7、定位模块,其分别与所述无人机、所述地面跟随模块和所述检测模块连接,用以根据所述碰撞次数和所述移动路程对无人机的飞行速度和输送管的输出长度进行调节。
8、进一步地,所述地面跟随模块还包括存储所述功能液体的水箱、与限位环固连的固定杆和与固定杆固连的转臂;
9、其中,地面跟随模块与无人机在水平方向以相同速度运行,转臂与水平面的夹角能够调节。
10、进一步地,所述地面跟随模块工作过程中,所述输送管处于拉直状态;
11、其中,所述拉直状态满足输送管无角度小于160°的弯折。
12、进一步地,所述定位模块在所述检测模块检测到所述输送管与所述限位环发生碰撞时控制所述无人机带动输送管向碰撞方向的反方向运动。
13、进一步地,所述定位模块根据单位时间内所述输送管与所述限位环的碰撞次数和输送管在限位环所在平面上的非重力路程确定所述无人机的稳定特征值;
14、所述稳定特征值与所述碰撞次数和所述非重力路程成负相关,所述非重力路程为所述输送管向远离地面方向的移动路程。
15、进一步地,所述定位模块根据所述稳定特征值判定是否调节无人机的飞行速度,在稳定特征值小于第一预设量值时判定结果为是,在稳定特征值大于等于第一预设量值时判定结果为否。
16、进一步地,所述定位模块在判定需调节无人机的飞行速度时根据所述稳定特征值对无人机的飞行速度进行减小调节;
17、其中,对无人机的飞行速度的减小量与所述稳定特征值成反比。
18、进一步地,所述定位模块根据所述输送管在限位环所在平面上的重力路程确定所述无人机的压力特征值;
19、其中,所述重力路程为所述输送管向靠近地面方向的移动路程,所述压力特征值与所述重力路程成正相关。
20、进一步地,所述定位模块根据所述无人机的所述压力特征值判定是否调节无人机的飞行状态,在压力特征值大于第二预设量值时判定结果为是,在压力特征值小于等于第二预设量值时判定结果为否。
21、进一步地,所述定位模块在判定需调节输送管的输出长度时,将输送管的输出长度根据所述压力特征值减小。
22、与现有技术相比,本发明的有益效果在于,通过设置地面跟随模块限制无人机的飞行方向,无人机在保持输送管拉直的同时保证输送管处于限位环内且避免和限位环的接触,能够通过控制地面跟随模块的移动实现对无人机的飞行路径的精确控制,控制地面跟随模块的移动比控制无人机的移动更易实现,简单有效,在减小控制难度的同时提高了无人机作业时的定位精度。
23、进一步地,本发明通过地面跟随模块的结构设计同时实现为无人机供电、提供功能液体和无人机的位置控制,为无人机的定位导航提供了有效的支持,在减小控制难度的同时进一步提高了无人机作业时的定位精度。
24、进一步地,本发明地面跟随模块工作过程中,输送管处于拉直状态,输送管的拉直保证了限位环对于无人机的限位精度,为定位模块和地面输送模块的工作提供了有效的技术支持,在减小控制难度的同时进一步提高了无人机作业时的定位精度。
25、进一步地,本发明定位模块在检测模块检测到输送管与限位环发生碰撞时控制无人机带动输送管向碰撞方向的反方向运动,通过该功能,无人机能够通过有限次自动调整处于符合设定的运行方向的状态,且在无人机受气流或其他因素导致脱离运行方向后也能够通过该功能归位,在减小控制难度的同时进一步提高了无人机作业时的定位精度。
26、进一步地,本发明定位模块计算稳定特征值并根据稳定特征值对无人机的飞行速度进行调整,若无人机的非重力路程和碰撞次数较多,说明飞行速度过快导致无人机的稳定性降低,需对应减小无人机的飞行速度以保证作业质量,在减小控制难度的同时进一步提高了无人机作业时的定位精度。
27、进一步地,本发明定位模块计算压力特征值并根据压力特征值对无人机的飞行状态进行调整,若无人机的重力路程较多,说明输送管施加给无人机的重力过大,将输送管的输出长度根据压力特征值减小能够有效避免该问题,在减小控制难度的同时进一步提高了无人机作业时的定位精度。
技术特征:
1.一种无人机导航定位系统,其特征在于,包括;
2.根据权利要求1所述的无人机导航定位系统,其特征在于,所述地面跟随模块还包括存储所述功能液体的水箱、与限位环固连的固定杆和与固定杆固连的转臂;
3.根据权利要求2所述的无人机导航定位系统,其特征在于,所述地面跟随模块工作过程中,所述输送管处于拉直状态;
4.根据权利要求3所述的无人机导航定位系统,其特征在于,所述定位模块在所述检测模块检测到所述输送管与所述限位环发生碰撞时控制所述无人机带动输送管向碰撞方向的反方向运动。
5.根据权利要求4所述的无人机导航定位系统,其特征在于,所述定位模块根据单位时间内所述输送管与所述限位环的碰撞次数和输送管在限位环所在平面上的非重力路程确定所述无人机的稳定特征值;
6.根据权利要求5所述的无人机导航定位系统,其特征在于,所述定位模块根据所述稳定特征值判定是否调节无人机的飞行速度,在稳定特征值小于第一预设量值时判定结果为是,在稳定特征值大于等于第一预设量值时判定结果为否。
7.根据权利要求6所述的无人机导航定位系统,其特征在于,所述定位模块在判定需调节无人机的飞行速度时根据所述稳定特征值对无人机的飞行速度进行减小调节;
8.根据权利要求7所述的无人机导航定位系统,其特征在于,所述定位模块根据所述输送管在限位环所在平面上的重力路程确定所述无人机的压力特征值;
9.根据权利要求8所述的无人机导航定位系统,其特征在于,所述定位模块根据所述无人机的压力特征值判定是否调节输送管的输出长度,在压力特征值大于第二预设量值时判定结果为是,在压力特征值小于等于第二预设量值时判定结果为否。
10.根据权利要求9所述的无人机导航定位系统,其特征在于,所述定位模块在判定需调节输送管的输出长度时,将输送管的输出长度根据所述压力特征值减小。
技术总结
本发明涉及无人机地面设施技术领域,尤其涉及一种无人机导航定位系统,包括:无人机;地面跟随模块,其包括限位环;输送管用以将地面跟随模块内的功能液体输送至无人机;检测模块,包括沿周向设置在所述限位环上的用以检测输送管与限位环的碰撞次数的压力传感器,以及设置在输送管上与限位环所在平面相交位置,用以检测输送管在限位环内的移动路程的位移传感器;定位模块根据碰撞次数和移动路程对无人机的飞行速度和输送管的输出长度进行调节;通过设置地面跟随模块限制无人机的飞行方向,控制地面跟随模块的移动比控制无人机的移动更易实现,简单有效在减小控制难度的同时提高了无人机作业时的定位精度。
技术研发人员:张凯,孟凡春,高学勤
受保护的技术使用者:北京翼动科技有限公司
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!