一种无人机数据采集系统的飞行轨迹规划方法
本发明涉及无线通信,具体是一种无人机数据采集系统的飞行轨迹规划方法。
背景技术:
1、无人机具有高移动性、部署灵活、成本低等优点,可以作为空中基站提供灵活、高效的通信解决方案,满足多种场景下的通信需求。在偏远山区或灾难发生时,无人机可以充当移动的通信中继站,快速地搭建应急通信网络。在野外森林、草原等人迹罕至的地方,可以灵活地部署无人机进行数据采集与监测。在大型活动举办或人员拥挤地区,无人机可以提供额外的通信容量,满足高峰时段的通信需求。此外,无人机还可以应用于星地融合网络、全息系统、边缘计算网络等。
2、在无人机执行任务时,合理的轨迹规划可以改善其与地面用户的通信质量,减少任务执行时间和能耗,也会提升其飞行的安全性与灵活性,因而十分重要。基于内容感知,《电子与信息学报》(“基于内容感知的无人机轨迹规划和资源分配联合优化方法”,电子与信息学报,2023,45(5):1644-1650)联合优化了无人机轨迹规划和无线资源分配,以最大化最小用户平均服务速率,同时满足了每个用户的内容需求。针对无人机辅助的分簇非正交多址系统,美国《国际电气与电子工程师协会物联网期刊》
3、(“uav-supportedclusterednomafor6g-enabledinternetofthings:trajectoryplanningandresourceallocation”,ieeeinternetofthings,2021,8(20):15041–15048)协同规划了无人机轨迹和子时隙分配策略,在无人机移动性受到约束的条件下,最大限度地提高物联网终端的上行平均可达和速率。
4、目前很多研究都是假设无人机飞行能量无限,但是实际工作中其能量往往是受限的,很明显,考虑到无人机能量受限这一因素是更加贴近实用场景的,其飞行轨迹规划尚存在较大的研究空间,针对能量受限无人机辅助的数据采集系统,本发明提出了一种无人机飞行轨迹规划方法,以期无人机能够收集到尽可能大的数据量。
技术实现思路
1、本发明的目的在于提供一种无人机数据采集系统的飞行轨迹规划方法,在无人机能量受限的条件下,通过规划无人机的飞行轨迹,能够显著地提升系统的数据采集量。
2、本发明的目的可以通过以下技术方案实现:
3、本申请提供了一种无人机数据采集系统的飞行轨迹规划方法,包括如下步骤:
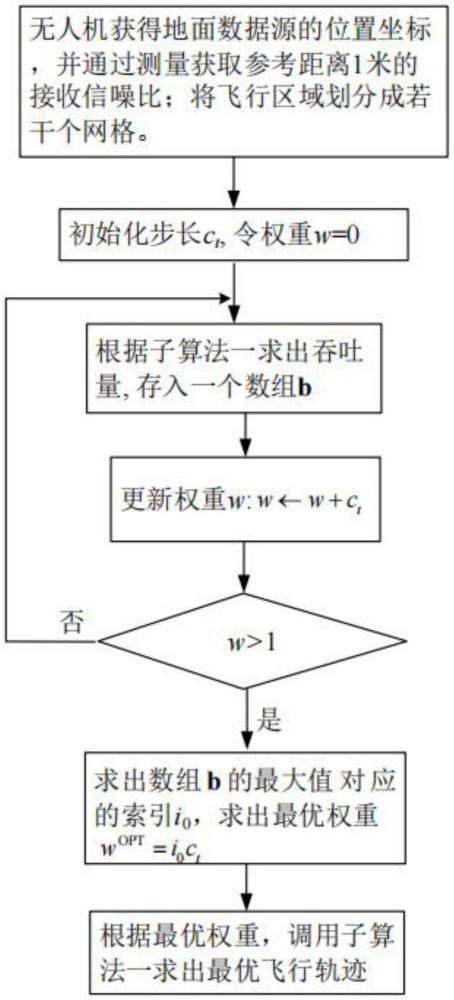
4、s1、无人机获得地面数据源的位置坐标,并且通过测量获取参考距离1米的接收信噪比;将无人机飞行区域划分成若干个网格;
5、s2、初始化步长和权重;
6、s3、根据子算法求出吞吐量,存入一个数组;
7、s4、更新权重,若权重大于1,则终止循环,否则返回s3;
8、s5、求出数组的最大值和相应索引,求出最优权重;
9、s6、根据最优权重,调用子算法求出最优飞行轨迹。
10、优选的,所述步骤s1的将无人机飞行区域划分成若干个网格,无人机飞行的矩形区域表示为:
11、ω={(x,y),x∈[0,xmax],y=∈[0,ymax]};被划分成个网格ix×iy个网格,每个网格尺寸是δl×δl,
12、优选的,所述步骤s2的初始化操作,初始化步长ct∈(0,1),权重w=0。
13、优选的,所述步骤s3的子算法,内容包括:
14、s301:初始化搜索策略因子ε=(0.5,1),搜寻门限0<εth≤0.1,衰减因子β∈(0.9,1);奖励折扣率0<γ<1,学习率0<α<1,动作-值函数这里s是状态空间,a是动作空间;构造结构数组traj用以存放飞行轨迹;标识符ifg=0;
15、s302:初始化时间索引n=0;无人机初始位置z(n)=[x(0)y(0)]t,无人机能量e=e0;系统吞吐量th=0;若ifg=1,把z(0)放入traj中;
16、s303:根据ε-贪婪策略选择动作a(n);
17、s304:无人机执行动作a(n),状态改变为z(n+1),得到奖励rn+1,若ifg=1,把z(n+1)放入traj中;
18、s305:更新若干参数,
19、
20、数据采集量th∶th+dδ,无人机能量e∶=e-dδ,这里dδ、eδ是一个时隙的数据采集量和能耗;
21、s306:若e>0,令n:=n+1,转入s303;若e≤0且ifg=0,终止循环,进入下一步骤s307;若e≤0且ifg=1,输出飞行轨迹traj和数据采集量th,终止整个程序;
22、s307:ε:=ε×β,若ε≤εth,令ifg=1,转入s302。
23、优选的,所述步骤s4的权重更新,表示为:w:=w+ct。
24、优选的,所述步骤s6的最优权重,先找到数组的最大值对应的索引,记为i0,则最优权重为wopt=i0 ct。
25、优选的,所述步骤s301的状态空间s和动作空间a,
26、s={z∶z=[x y]t,x=iδl,y=jδl,i=0~ix,j=0~iy,
27、其中ix=xmax/δl,iy=ymax/δl,上标t是转置操作,a={a∶a=0,1,2,3,4},这里0~4分别代表悬停、向东、向南、向西、向北这五个动作。
28、优选的,所述步骤s303的ε-贪婪策略,产生随机数v∈[0,1];若v<ε,随机选择a(n)∈a,否则
29、优选的,所述步骤s304的奖励函数,奖励函数是单位时隙飞行能耗和数据采集量的加权之和,并给定奖励函数的加权因子;
30、
31、其中,0≤w≤1是权重,δt=δl/v0是一个飞行时隙时长,v0是飞行速度,pfly、phov分别是无人机飞行功率和悬停功率,cr和ce是两个常数,rσ(n)是在n时刻的通信速率,表示为:
32、
33、其中,h0是无人机飞行高度,k是数据源个数,b是每个数据源分配的带宽,βrev,k是针对数据源k的、在参考距离1米处的基站接收信噪比,zs,k=[xs,k ys,k]是数据源k的坐标,z(n)=x(n)y(n)t是在时刻n无人机投影到地面的坐标,‖.‖表示向量的模。
34、优选的,所述步骤s305的dδ和eδ,其中若n时刻的动作是悬停,eδ=phovδt,否则eδ=pflyδt。
35、本发明的有益效果为:
36、本发明基于地面数据源的坐标位置信息反馈,为无人机数据采集系统提供了一种飞行轨迹规划方法,该方法能够在满足无人机能量受限约束的同时,有效地提升系统数据采集量m相比若干基线对比方案,如“静止不动”和“贪婪飞行”方案,该方法取得的数据采集量更高,本发明还具有反馈量小、系统开销小的优点。
技术特征:
1.一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:
2.根据权利要求1所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:
3.根据权利要求1所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s2的初始化操作,初始化步长ct∈(0,1),权重w=0。
4.根据权利要求1所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s3的子算法,内容包括:
5.根据权利要求1所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s4的权重更新,表示为:w:=w+ct。
6.根据权利要求1所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s6的最优权重,先找到数组的最大值对应的索引,记为i0,则最优权重为wopt=i0ct。
7.根据权利要求4所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s301的状态空间s和动作空间a,
8.根据权利要求4所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s303的ε-贪婪策略,产生随机数v∈[0,1];若v<ε,随机选择a(n)∈a,否则
9.根据权利要求4所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s304的奖励函数,奖励函数是单位时隙飞行能耗和数据采集量的加权之和,并给定奖励函数的加权因子;
10.根据权利要求4所述的一种无人机数据采集系统的飞行轨迹规划方法,其特征在于:所述步骤s305的dδ和eδ,其中若n时刻的动作是悬停,eδ=phovδt,否则eδ=pflyδt。
技术总结
本发明公开了一种无人机数据采集系统的飞行轨迹规划方法,涉及无线通信技术领域,包括一个无人机和若干个数据源,无人机作为空中基站采集地面数据源产生的数据,在无人机能量受限的条件下,优化其飞行轨迹使得数据采集量最大化,通过获得地面数据源的位置坐标,并且测量获取参考距离1米的接收信噪比,再把问题建模成马尔科夫决策过程,确定状态、动作、奖励三要素,其中奖励函数是单位时隙飞行能耗和数据采集量的加权之和,给定奖励函数的加权因子,求出飞行轨迹和数据采集量;把加权因子从0到1按照一定步长遍历,寻找到最大的数据采集量,对应的飞行轨迹即为所求,与静止不动方案、贪婪策略相比,在相同条件下本方法取得的数据采集量更高。
技术研发人员:周雯,缪玲,许艺瀚,花敏
受保护的技术使用者:广州航海学院
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!