基于机器视觉的机器人路径规划方法与流程
本公开涉及机器视觉,具体地,涉及一种基于机器视觉的机器人路径规划方法。
背景技术:
1、机器人路径规划是指在给定环境中,通过算法确定机器人从起点到目标点的最佳路径的过程,机器人的路径规划对于自主导航机器人、自动驾驶车辆等应用具有重要意义。
2、然而,传统的机器人路径规划方法主要基于几何学和规划算法,通常假设环境是静态的,即障碍物不会移动或发生变化。这种假设在实际场景中往往不成立,因为现实环境中障碍物可能会移动、出现、消失,需要实时适应环境变化。也就是说,传统规划方法往往依赖于静态地图信息进行路径规划,对于复杂、未知或动态变化的环境适应性较差,无法实现智能、灵活的路径规划。
3、因此,期望一种基于机器视觉的机器人路径规划方案。
技术实现思路
1、提供该
技术实现要素:
部分以便以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。该发明内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、第一方面,本公开提供了一种基于机器视觉的机器人路径规划方法,所述方法包括:
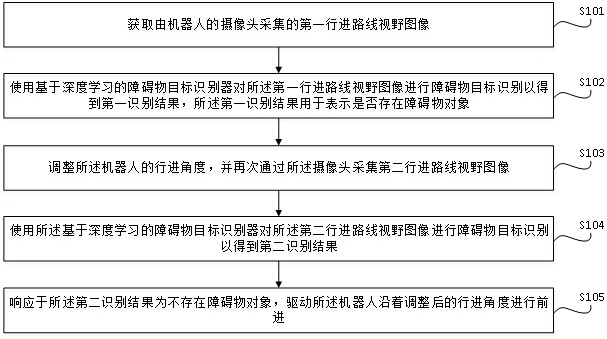
3、获取由机器人的摄像头采集的第一行进路线视野图像;
4、使用基于深度学习的障碍物目标识别器对所述第一行进路线视野图像进行障碍物目标识别以得到第一识别结果,所述第一识别结果用于表示是否存在障碍物对象;
5、调整所述机器人的行进角度,并再次通过所述摄像头采集第二行进路线视野图像;以及
6、使用所述基于深度学习的障碍物目标识别器对所述第二行进路线视野图像进行障碍物目标识别以得到第二识别结果;以及
7、响应于所述第二识别结果为不存在障碍物对象,驱动所述机器人沿着调整后的行进角度进行前进。
8、可选地,使用基于深度学习的障碍物目标识别器对所述第一行进路线视野图像进行障碍物目标识别以得到第一识别结果,所述第一识别结果用于表示是否存在障碍物对象,包括:对所述第一行进路线视野图像进行亮度补偿以得到亮度补偿后第一行进路线视野图像;通过深度神经网络对所述亮度补偿后第一行进路线视野图像进行特征提取以得到行进路线视野浅层特征图和行进路线视野语义特征图;将所述行进路线视野浅层特征图和所述行进路线视野语义特征图通过语音引导注意力特征选择网络以得到语义指导行进路线视野多尺度特征图;将所述语义指导行进路线视野多尺度特征图通过基于注意力机制的区域转移模块以得到前景凸显语义指导行进路线视野多尺度特征图;基于所述前景凸显语义指导行进路线视野多尺度特征图,确定所述第一识别结果。
9、可选地,所述深度神经网络为渐进特征金字塔网络。
10、可选地,将所述行进路线视野浅层特征图和所述行进路线视野语义特征图通过语音引导注意力特征选择网络以得到语义指导行进路线视野多尺度特征图,包括:将所述行进路线视野语义特征图中沿通道维度的各个特征矩阵进行全局均值池化处理以得到行进路线视野语义池化特征向量;将所述行进路线视野语义池化特征向量通过全连接模块以对所述行进路线视野语义池化特征向量进行全连接编码以得到行进路线视野语义全连接特征向量;将所述行进路线视野语义全连接特征向量和所述行进路线视野浅层特征图进行基于通道维度的加权融合以得到路线视野语义多层次融合特征图;将所述路线视野语义多层次融合特征图和所述行进路线视野语义特征图进行融合以得到所述语义指导行进路线视野多尺度特征图;其中,将所述行进路线视野语义特征图中沿通道维度的各个特征矩阵进行全局均值池化处理以得到行进路线视野语义池化特征向量,包括:计算所述行进路线视野浅层特征图中沿通道维度的每个特征矩阵的全局均值以得到所述行进路线视野语义池化特征向量;其中,将所述行进路线视野语义全连接特征向量和所述行进路线视野浅层特征图进行基于通道维度的加权融合以得到路线视野语义多层次融合特征图,包括:利用所述进路线视野语义全连接特征向量对所述行进路线视野浅层特征图进行沿通道维度的加权处理以得到所述路线视野语义多层次融合特征图。
11、可选地,将所述行进路线视野语义池化特征向量通过全连接模块以对所述行进路线视野语义池化特征向量进行全连接编码以得到行进路线视野语义全连接特征向量,包括:将所述行进路线视野语义池化特征向量与所述预定的权重系数矩阵进行矩阵相乘后,将获得的特征向量与预定的偏移向量进行按位置相加以得到调制后行进路线视野语义池化特征向量;使用激活函数对所述调制后行进路线视野语义池化特征向量进行激活以得到所述行进路线视野语义全连接特征向量。
12、可选地,将所述语义指导行进路线视野多尺度特征图通过基于注意力机制的区域转移模块以得到前景凸显语义指导行进路线视野多尺度特征图,包括:计算所述语义指导行进路线视野多尺度特征图的语义指导行进路线视野空间注意特征矩阵;基于预定阈值对所述语义指导行进路线视野空间注意特征矩阵进行掩码化处理以得到掩码化语义指导行进路线视野空间注意特征矩阵;计算所述语义指导行进路线视野多尺度特征图中沿通道维度的各个特征矩阵与所述掩码化语义指导行进路线视野空间注意特征矩阵之间的按位置点乘以得到所述前景凸显语义指导行进路线视野多尺度特征图。
13、可选地,计算所述语义指导行进路线视野多尺度特征图的语义指导行进路线视野空间注意特征矩阵,包括:对所述语义指导行进路线视野多尺度特征图进行沿通道维度的全局均值池化处理以得到语义指导行进路线视野全局均值池化特征矩阵;将所述语义指导行进路线视野全局均值池化特征矩阵输入sigmoid激活单元以得到所述语义指导行进路线视野空间注意特征矩阵。
14、可选地,基于预定阈值对所述语义指导行进路线视野空间注意特征矩阵进行掩码化处理以得到掩码化语义指导行进路线视野空间注意特征矩阵,包括:响应于所述语义指导行进路线视野空间注意特征矩阵中的各个位置特征值大于或等于所述预定阈值,取该位置特征值的原值,否则置为零。
15、可选地,基于所述前景凸显语义指导行进路线视野多尺度特征图,确定所述第一识别结果,包括:将所述前景凸显语义指导行进路线视野多尺度特征图通过分类器以得到所述第一识别结果。
16、采用上述技术方案,通过获取由机器人的摄像头采集的第一行进路线视野图像,然后使用基于深度学习的障碍物目标识别器进行障碍物目标识别以得到第一识别结果;调整所述机器人的行进角度,并再次通过所述摄像头采集第二行进路线视野图像;使用所述基于深度学习的障碍物目标识别器进行障碍物目标识别以得到第二识别结果;以及,响应于所述第二识别结果为不存在障碍物对象,驱动所述机器人沿着调整后的行进角度进行前进。这样,可以使机器人能够通过感知外界环境来作出相应路径规划调整,从而更有效地避开障碍物并达到目标位置,提高了机器人路径规划的灵活性和智能化程度。
17、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种基于机器视觉的机器人路径规划方法,其特征在于,包括:
2.根据权利要求1所述的基于机器视觉的机器人路径规划方法,其特征在于,所述深度神经网络为渐进特征金字塔网络。
3.根据权利要求2所述的基于机器视觉的机器人路径规划方法,其特征在于,将所述行进路线视野浅层特征图和所述行进路线视野语义特征图通过语音引导注意力特征选择网络以得到语义指导行进路线视野多尺度特征图,包括:
4.根据权利要求3所述的基于机器视觉的机器人路径规划方法,其特征在于,将所述行进路线视野语义池化特征向量通过全连接模块以对所述行进路线视野语义池化特征向量进行全连接编码以得到行进路线视野语义全连接特征向量,包括:
5.根据权利要求4所述的基于机器视觉的机器人路径规划方法,其特征在于,将所述语义指导行进路线视野多尺度特征图通过基于注意力机制的区域转移模块以得到前景凸显语义指导行进路线视野多尺度特征图,包括:
6.根据权利要求5所述的基于机器视觉的机器人路径规划方法,其特征在于,计算所述语义指导行进路线视野多尺度特征图的语义指导行进路线视野空间注意特征矩阵,包括:
7.根据权利要求6所述的基于机器视觉的机器人路径规划方法,其特征在于,基于预定阈值对所述语义指导行进路线视野空间注意特征矩阵进行掩码化处理以得到掩码化语义指导行进路线视野空间注意特征矩阵,包括:
8.根据权利要求7所述的基于机器视觉的机器人路径规划方法,其特征在于,基于所述前景凸显语义指导行进路线视野多尺度特征图,确定所述第一识别结果,包括:将所述前景凸显语义指导行进路线视野多尺度特征图通过分类器以得到所述第一识别结果。
技术总结
本公开涉及一种基于机器视觉的机器人路径规划方法。该方法包括:获取由机器人的摄像头采集的第一行进路线视野图像,然后使用基于深度学习的障碍物目标识别器进行障碍物目标识别以得到第一识别结果;调整所述机器人的行进角度,并再次通过所述摄像头采集第二行进路线视野图像;使用所述基于深度学习的障碍物目标识别器进行障碍物目标识别以得到第二识别结果;以及,响应于所述第二识别结果为不存在障碍物对象,驱动所述机器人沿着调整后的行进角度进行前进。这样,可以使机器人能够通过感知外界环境来作出相应路径规划调整,从而更有效地避开障碍物并达到目标位置,提高了机器人路径规划的灵活性和智能化程度。
技术研发人员:刘国营,葛继,席云斌,郑瑜
受保护的技术使用者:无锡图创智能科技有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!