一种分布驱动式EPS控制系统及控制方法与流程
本发明涉及车辆转向控制,尤其涉及一种分布驱动式eps控制系统及控制方法。
背景技术:
1、现有的eps控制器一般由mcu、预驱动、三相桥、tas扭角传感器数据处理、can收发器、rps电机转子角度传感器组成。
2、但是现有的eps控制器的传感器信号、can通信等的数据处理和电机控制系统的pi调节和foc矢量控制算法集中在一个mcu内,对mcu的性能要求以及软件处理事务的效率和协调性的要求较高,另外eps控制器由单个mcu同时进行数据处理和实现电机控制pid调节和foc控制算法难度大,不理想,导致eps控制器进行数据处理和实现电机控制pid调节和foc控制算法难度大,控制效果差,控制器负荷较大。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。为此,本发明提供一种分布驱动式eps控制系统及控制方法。
2、本发明第一方面提供一种分布驱动式eps控制系统,包括:
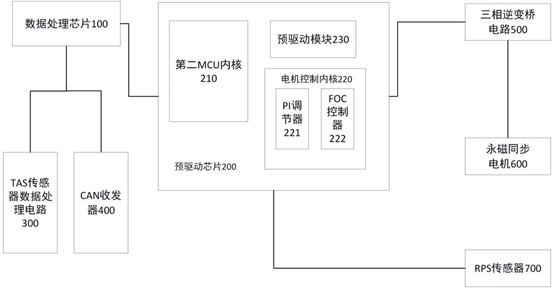
3、数据处理芯片、预驱动芯片;
4、所述数据处理芯片基于第一mcu内核建立,所述第一mcu内核用于接收车辆运行数据并根据所述车辆运行数据计算电机q轴给定电流输出至所述预驱动芯片;
5、所述预驱动芯片包括第二mcu内核、电机控制内核及预驱动模块,所述第二mcu内核用于采集电机三相电流,还用于接收电机转子角度数据,根据所述电机转子角度数据计算电机d轴给定电流,所述电机控制内核用于根据所述q轴给定电流及所述d轴给定电流调节控制电机q轴电流及电机d轴电流,并输出控制信号至所述预驱动模块以驱动电机。
6、根据本发明提供的一种分布驱动式eps控制系统,所述车辆运行数据包括:tas扭矩数据、tas角度数据、车速数据及发动机转速数据。
7、根据本发明提供的一种分布驱动式eps控制系统,还包括:
8、tas传感器数据处理电路、can收发器;
9、所述tas传感器数据处理电路及所述can收发器分别与所述数据处理芯片电连接;
10、所述tas传感器数据处理电路用于采集所述tas扭矩数据及所述tas角度数据并发送至所述数据处理芯片,所述can收发器用于接收所述车速数据及所述发动机转速数据并发送至所述数据处理芯片。
11、根据本发明提供的一种分布驱动式eps控制系统,还包括:
12、三相逆变桥电路、永磁同步电机、rps传感器;
13、所述rps传感器用于采集所述电机转子角度数据并通过abz模式发送至所述预驱动芯片,所述三相逆变桥电路用于接收所述预驱动芯片输出的控制信号进行功率放大,并发送至所述永磁同步电机,所述三相逆变桥电路还用于反馈自身传输的三相电流至所述预驱动芯片。
14、根据本发明提供的一种分布驱动式eps控制系统,所述电机控制内核包括:
15、pi调节器、foc控制器;
16、所述pi调节器用于对所述电机q轴电流、所述电机d轴电流进行pi调节,所述foc控制器根据所述电机q轴电流、所述电机d轴电流、所述电机转子角度数据及所述三相电流对电机进行foc控制。
17、根据本发明提供的一种分布驱动式eps控制系统,所述数据处理芯片与所述预驱动芯片间通过spi通信。
18、本发明第二方面还提供一种分布驱动式eps控制方法,基于以上任一项所述的一种分布驱动式eps控制系统实现,包括:
19、s1:数据处理芯片接收车辆运行数据,并根据所述车辆运行数据计算获得电机q轴给定电流输出至预驱动芯片;
20、s2:预驱动芯片中的第二mcu内核接收电机转子角度数据,根据所述电机转子角度数据计算获得电机d轴给定电流;
21、s3:预驱动芯片中的第二mcu内核调用电机控制内核对电机q轴电流及电机d轴电流进行调节控制,输出控制信号至预驱动模块;
22、s4:预驱动模块根据所述控制信号进行三相桥控制,以实现电机驱动。
23、根据本发明提供的一种分布驱动式eps控制方法,步骤s3进一步包括:
24、s31:第二mcu内核接收三相逆变桥电路反馈的三相电流;
25、s32:第二mcu内核调用电机控制内核对所述电机q轴给定电流、所述电机d轴给定电流、所述电机转子角度数据及采集到的三相电流,进行q轴电流及d轴电流的pi调节及foc控制,输出控制信号。
26、根据本发明提供的一种分布驱动式eps控制方法,步骤s32中的所述控制信号为svpwm信号。
27、根据本发明提供的一种分布驱动式eps控制方法,步骤s4进一步包括:
28、s41:预驱动模块接收电机控制内核调节控制后输出的控制信号,并将所述控制信号输出至三相逆变桥电路;
29、s42:三相逆变桥电路将所述控制信号进行功率方大,驱动永磁同步电机。
30、本发明提供的一种分布驱动式eps控制系统及控制方法,有别与传统的集中式的eps控制器的整个数据处理与电机控制集中在一个mcu内的处理方式,本发明eps控制器是分布式的,数据处理由mcu完成,而电机控制由集成mcu内核和电机控制硬件模块内核的电机预驱动芯片完成。
31、本发明通过第一mcu内核作为主控mcu负责处理数据,集成第二mcu内核和电机控制内核的预驱动芯片负责控制电机的分布驱动式方案解决了mcu负荷重、选型难的问题,将数据处理和电机控制分布在不同的mcu芯片中,能够提高电机控制的稳定性,另外数据处理和电机控制同时进行,电机控制由预驱芯片内置mcu核调用内部pi硬件单元和foc硬件单元实现,比纯软件算法实现要稳定可靠,简单易操作,最后将六路svpwm信号在芯片内传递给预驱动模块,能够减少故障点,节省pcb空间。
32、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种分布驱动式eps控制系统,其特征在于,包括:
2.根据权利要求1所述的一种分布驱动式eps控制系统,其特征在于,所述车辆运行数据包括:tas扭矩数据、tas角度数据、车速数据及发动机转速数据。
3.根据权利要求2所述的一种分布驱动式eps控制系统,其特征在于,还包括:
4.根据权利要求1所述的一种分布驱动式eps控制系统,其特征在于,还包括:
5.根据权利要求4所述的一种分布驱动式eps控制系统,其特征在于,所述电机控制内核包括:
6.根据权利要求1所述的一种分布驱动式eps控制系统,其特征在于,所述数据处理芯片与所述预驱动芯片间通过spi通信。
7.一种分布驱动式eps控制方法,基于权利要求1-6任一项所述的一种分布驱动式eps控制系统实现,其特征在于,包括:
8.根据权利要求7所述的一种分布驱动式eps控制方法,其特征在于,步骤s3进一步包括:
9.根据权利要求8所述的一种分布驱动式eps控制方法,其特征在于,步骤s32中的所述控制信号为svpwm信号。
10.根据权利要求8所述的一种分布驱动式eps控制方法,其特征在于,步骤s4进一步包括:
技术总结
本发明提供一种分布驱动式EPS控制系统及控制方法,该系统包括:基于第一MCU内核建立的数据处理芯片,用于接收车辆运行数据,并根据车辆运行数据计算电机Q轴给定电流;集成第二MCU内核、电机控制内核及预驱动模块的预驱动芯片,用于接收电机转子角度数据计算电机D轴给定电流,并采集电机三相电流,结合接收到的Q轴给定电流和计算到的D轴给定电流以及采集到的转子角度,对电机Q轴电流及电机D轴电流进行PI调节,并对电机进行FOC控制,输出6路PWM控制信号至预驱动模块以进行三相桥控制,进而驱动电机。本发明能够降低EPS系统中的MCU负载,提升了电机控制的稳定性。
技术研发人员:崔建霞,周振强,李志杰,张相如,王豪
受保护的技术使用者:天津德星智能科技有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!