一种基于预测安全控制的智能车路径规划与避障方法
本发明涉及智能车路径规划与避障领域,尤其涉及一种基于预测安全控制的智能车路径规划与避障方法。
背景技术:
1、近年来,随着现代科技的发展,无人驾驶汽车、无人机和服务机器人等自主移动设备在各个领域得到了广泛应用。这些自主系统的核心挑战之一是如何在复杂和动态的环境中安全地导航和避障。控制障碍函数(control barrier function,cbf)和预测安全控制(predictive safety control,psc)在自主导航和避障领域显示出巨大潜力。控制障碍函数是一种用于保证系统安全性的数学工具,通过设计适当的障碍函数,可以在控制输入的选择上施加约束,从而避免系统状态进入不安全区域。预测安全控制则是一种基于模型的预测控制策略,通过在每个控制时刻优化未来一段时间内的控制序列,以实现系统的最佳性能和安全性。预测安全控制具有较强的鲁棒性和实时性,适用于处理复杂的非线性系统和多约束问题。
2、目前,主流的避障技术主要包括基于预定规则的方法、基于路径规划的方法和基于人工势场的方法。基于预定规则的方法通常依赖于事先设定的固定规则来实现避障,但在面对动态变化的环境时往往显得僵化,难以灵活调整避障策略。基于路径规划的方法通过预先规划一条安全路径来实现避障,但全局路径规划方法通常计算复杂度高,难以在动态环境中实时更新,导致系统反应滞后,无法有效应对环境的动态变化。基于人工势场的方法利用势场函数来驱动系统避开障碍物,但容易陷入局部极小值,导致系统无法成功避障,影响系统的整体性能。
3、现有技术在自主导航和避障方面存在几个主要问题。首先,基于预定规则和路径规划的方法在面对动态环境时,缺乏灵活性和实时调整能力,容易导致系统无法及时避开新出现的障碍物。其次,全局路径规划方法在复杂环境中计算量大,难以实时更新路径,导致系统反应迟缓,无法保证安全。此外,许多现有方法在处理紧急避障时缺乏有效的安全保障机制,可能导致系统进入不安全状态,增加碰撞风险。最后,基于人工势场的方法容易陷入局部极小值,导致系统无法成功避障,影响系统整体性能和可靠性。
技术实现思路
1、为了解决传统方法中灵活性不足、实时性差、安全性低及局部极小值的问题,本发明提供了一种基于预测安全控制的智能车路径规划与避障方法,通过结合cbf和psc实时调整避障策略;降低计算复杂度,采用模型预测控制策略优化计算效率,确保在复杂环境中也能实时更新路径规划;增强安全性,通过控制障碍函数施加约束,确保系统在紧急情况下依然能够保持安全,避免进入不安全状态;以及解决局部极小值问题,通过综合应用cbf和psc,避免陷入局部极小值,确保系统能够成功避障,提高整体性能和可靠性。一种基于预测安全控制的智能车路径规划与避障方法,主要包括:
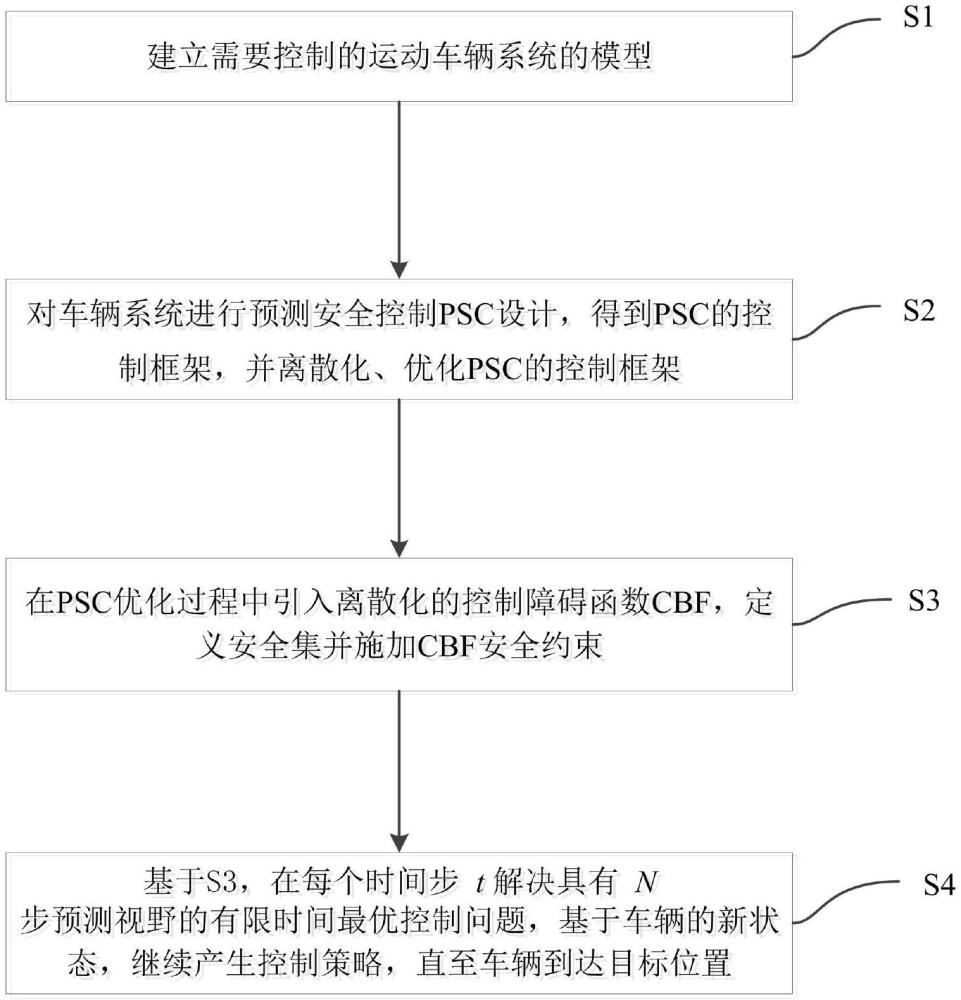
2、s1:建立需要控制的运动车辆系统的模型;
3、s2:对车辆系统进行预测安全控制psc设计,得到psc的控制框架,并离散化、优化psc的控制框架;
4、s3:在psc优化过程中引入离散化的控制障碍函数cbf,定义安全集并施加cbf安全约束;
5、s4:基于s3,在每个时间步t解决具有n步预测视野的有限时间最优控制问题,基于车辆的新状态,继续产生控制策略,直至车辆到达目标位置。
6、一种存储设备,所述存储设备存储指令及数据用于实现一种基于预测安全控制的智能车路径规划与避障方法。
7、一种基于预测安全控制的智能车路径规划与避障设备,包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现一种基于预测安全控制的智能车路径规划与避障方法。
8、本发明提供的技术方案带来的有益效果是:本发明提供的路径规划与避障方法,解决了现有技术在动态环境中灵活性不足、实时性差、安全性低及局部极小值问题,通过结合控制障碍函数和预测安全控制技术,定义安全区域并施加约束,确保系统状态始终处于安全区域。同时,预测安全控制动态优化控制输入,提高系统在复杂环境中的实时性和鲁棒性,避免局部极小值问题,确保系统成功避障。本发明显著提升了自主移动设备的性能和可靠性,提高了系统的整体性能和在动态环境中的适应能力,具有重要的应用前景和广泛的实际价值。
技术特征:
1.一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:包括:
2.如权利要求1所述的一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:s1中,自动驾驶中的车辆系统的模型简化为二维平面上运动的刚体结构,考虑因素包括车辆的位姿、速度、前轮转角,车辆的位姿包括位置坐标、航向角;任意时刻车辆的状态表示为状态量ξ=[x(t),y(t),θ(t)],控制量为u=[v(t),δ(t)],(x(t),y(t))表示车辆轴心的位置坐标,θ(t)表示航向角,δ(t)表示转向角度。
3.如权利要求1所述的一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:s2中,在每个离散时刻的优化目标为:
4.如权利要求1所述的一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:s3中,控制障碍函数h(x)为:
5.如权利要求1所述的一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:s3中,定义的安全集为:
6.如权利要求1所述的一种基于预测安全控制的智能车路径规划与避障方法,其特征在于:s4中,在每个时间步t解决具有n步预测视野的有限时间最优控制问题:
7.一种存储设备,其特征在于:所述存储设备存储指令及数据用于实现权利要求1~6任一项所述的基于预测安全控制的智能车路径规划与避障方法。
8.一种基于预测安全控制的智能车路径规划与避障设备,其特征在于:包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现权利要求1~6任一项所述的基于预测安全控制的智能车路径规划与避障方法。
技术总结
本发明提供了一种基于预测安全控制的智能车路径规划与避障方法,涉及智能车路径规划与避障领域,该方法包括,建立需要控制的运动车辆系统的模型;对车辆系统进行预测安全控制PSC设计,得到PSC的控制框架,并离散化、优化PSC的控制框架;在PSC优化过程中引入离散化的控制障碍函数CBF,定义安全集并施加CBF安全约束;基于此,在每个时间步t解决具有N步预测视野的有限时间最优控制问题,基于车辆的新状态,继续产生控制策略,直至车辆到达目标位置。本发明的有益效果是:本发明提供的路径规划与避障方法,解决了现有技术在动态环境中灵活性不足、实时性差、安全性低及局部极小值问题,显著提升了自主移动设备的性能和可靠性。
技术研发人员:翟超,王婧怡,张和洪
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!