具有通信时滞的多智能体系统H无穷滞后编队控制方法
本发明属于协同控制领域,尤其涉及具有通信时滞的多智能体系统h无穷滞后编队控制方法。
背景技术:
1、作为多智能体系统协同控制的重要研究方向之一,编队控制的目的是设计合适的控制策略使得当时间趋于无穷时所有智能体保持一个预定的几何形状并且速度趋于相同。迄今为止,已经报道了许多关于多智能体系统编队控制的研究成果。事实上,每个智能体获取自身的状态信息明显落后于虚拟领导者状态信息的获取。鉴于此,进一步研究多智能体系统的滞后编队控制问题具有重要的理论意义。
2、在实现编队的过程中,智能体间的通信会由于许多因素(如信息拥塞,有限的传输速度等)的影响而导致时滞的产生。到目前为止,具有通信时滞的多智能体系统的编队控制问题已经被初步研究。此外,考虑到多智能体系统经常会遭受一些外部干扰的影响,例如风力、噪声、温度等。因此,一些研究人员也初步研究了具有通信时滞和外部干扰的多智能体系统的h无穷编队控制问题。
3、然而,根据现有的关于多智能体系统协同控制的研究结果来看,具有通信时滞和外部干扰的多智能体系统h无穷滞后编队控制问题还未被考虑过。显然,研究具有通信时滞和外部干扰的多智能体系统的h无穷滞后编队控制问题具有重要的理论意义和实际的应用价值。
技术实现思路
1、本发明实施例的目的在于提供具有通信时滞的多智能体系统h无穷滞后编队控制方法,旨在解决迄今尚未被考虑的具有通信时滞和外部干扰的多智能体系统的h无穷滞后编队控制问题。
2、本发明实施例是这样实现的,一种具有通信时滞的多智能体系统h无穷滞后编队控制方法,所述方法包括:
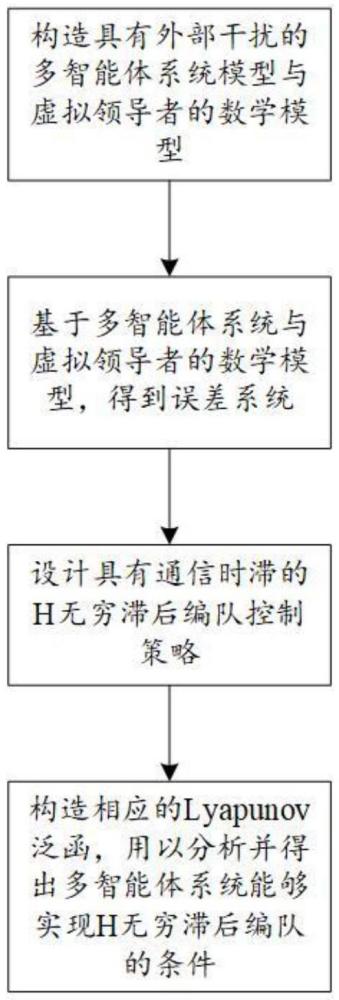
3、构造具有外部干扰的多智能体系统模型与虚拟领导者的数学模型;
4、基于多智能体系统与虚拟领导者的数学模型,得到误差系统;
5、设计具有通信时滞的h无穷滞后编队控制策略;
6、构造相应的lyapunov泛函,用以分析并得出多智能体系统能够实现h无穷滞后编队的条件。
7、一种具有通信时滞的多智能体系统h无穷滞后编队控制方法,步骤如下:
8、步骤1:构建具有外部干扰的多智能体系统数学模型如下:
9、
10、上式中,和分别表示智能体c的位置向量,速度向量和控制输入,和分别表示智能体c的位置向量和速度向量的导数,表示智能体的内部动态,t是时间变量,表示a维实向量,表示外部干扰并且满足
11、
12、对于任意的表示时间变量;是一个非线性函数并且满足以下不等式:
13、||δ(t,o1,o2)-δ(t,o3,o4)||≤q1||o1-o3||+q2||o2-o4||;
14、对于任意的其中q1和q2是正常数。
15、多智能体系统的虚拟领导者的数学模型表示如下:
16、
17、上式中,和分别表示虚拟领导者的位置向量和速度向量,和分别表示虚拟领导者的位置向量和速度向量的导数,表示虚拟领导者的内部动态,t是时间变量,表示a维实向量。
18、步骤2:所述的具有通信时滞的多智能体系统h无穷滞后编队定义如下:
19、
20、对于任意的s1表示时间变量,l表示多智能体系统中智能体的个数,其中m是一个正常数,和分别表示智能体c的位置向量和速度向量,和分别表示虚拟领导者的位置向量和速度向量,表示a维实向量,表示智能体c和虚拟领导者之间的时滞,和分别表示带有时滞α的虚拟领导者的位置向量和速度向量,是智能体c和虚拟领导者之间期望的相对位置,v(·)是一个非负函数,表示实数,表示外部干扰并且满足
21、
22、对于任意的表示时间变量。
23、步骤3:所述的具有通信时滞的h无穷滞后编队控制策略设计如下:
24、
25、上式中,c=1,2,…,l,l表示多智能体系统中智能体的个数,表示智能体c的控制输入,表示控制器参数,和分别表示智能体c的位置向量和速度向量,和分别表示虚拟领导者的位置向量和速度向量,t是时间变量,表示a维实向量,表示智能体c和虚拟领导者之间的时滞,是智能体c和虚拟领导者之间期望的相对位置,是智能体i和虚拟领导者之间期望的相对位置,表示智能体之间的通信时滞,和分别表示带有时滞β的智能体i的位置向量和速度向量,为智能体之间的耦合权重矩阵,若智能体c与智能体i之间有通信,那么否则此外,表示l×l维实矩阵,是一个非线性函数并且满足以下不等式:
26、||δ(t,o1,o2)-δ(t,o3,o4)||≤q1||o1-o3||+q2||o2-o4||;
27、对于任意的其中q1和q2是正常数。
28、与现有技术相比,本发明的有益效果是:提出了一种具有通信时滞的多智能体系统h无穷滞后编队控制方法;考虑到每个智能体获取自身的状态信息明显落后于虚拟领导者状态信息的获取以及多智能体系统会遭受外部干扰和通信时滞的影响,本发明首次提出了具有通信时滞和外部干扰的多智能体系统h无穷滞后编队控制方法。从实现角度考虑,本发明所需的计算资源更少并且所需控制量更容易获取;具有通信时滞的多智能体系统h无穷滞后编队控制方法适用于任何由本发明所考虑的单个智能体的数学模型来建模的实际系统,应用范围广泛。
技术特征:
1.一种具有通信时滞的多智能体系统h无穷滞后编队控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的具有通信时滞的多智能体系统h无穷滞后编队控制方法,其特征在于,构建具有外部干扰的多智能体系统数学模型如下:
3.根据权利要求1所述的具有通信时滞的多智能体系统h无穷滞后编队控制方法,其特征在于,所述虚拟领导者的数学模型为:
4.根据权利要求1所述的具有通信时滞的多智能体系统h无穷滞后编队控制方法,其特征在于,h无穷滞后编队定义如下:
5.根据权利要求1所述的具有通信时滞的多智能体系统h无穷滞后编队控制方法,其特征在于,具有通信时滞的h无穷滞后编队控制策略设计如下:
技术总结
本发明主要针对协同控制领域,公开了一种具有通信时滞的多智能体系统H无穷滞后编队控制方法,该方法包括如下步骤:首先,构造具有外部干扰的多智能体系统模型与虚拟领导者的数学模型;其次,基于多智能体系统与虚拟领导者的数学模型,得到误差系统;然后,设计具有通信时滞的H无穷滞后编队控制策略;最后,构造相应的Lyapunov泛函,用以分析并得出多智能体系统能够实现H无穷滞后编队的条件。从实现的角度考虑,本发明所需的计算资源更少并且所需控制量更容易获取。
技术研发人员:王金亮,凌坤,文晓璐,任顺燕
受保护的技术使用者:天津工业大学
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!