一种电动车控制器的参数优化方法及系统与流程
本发明涉及电动车,特别是指一种电动车控制器的参数优化方法及系统。
背景技术:
1、对混合动力电动车(hybrid electric vehicle, hev)的控制器参数进行优化,在提高车辆性能、经济性、环保性和用户体验等方面具有重要意义,是实现高效、环保和智能化交通工具的关键技术之一。
2、当前对于混合动力电动车的控制器进行参数优化过程中,往往将行驶速度与能源优化进行同时考虑,采用一步式求解方法可以更接近全局最优解,而不是局部最优解,从而提高燃料经济性和行驶性能。
3、然而采用一步式求解方法将面对更为复杂的多目标优化问题,计算复杂度较高,在实际驾驶过程中,控制器需要实时计算最优速度和能源管理策略,一步式求解方法对计算能力和响应速度提出了更高的要求,导致计算成本的提升。
技术实现思路
1、为了解决现有技术存在的采用一步式求解方法将面对更为复杂的多目标优化问题,计算复杂度较高,在实际驾驶过程中,控制器需要实时计算最优速度和能源管理策略,一步式求解方法对计算能力和响应速度提出了更高的要求,导致计算成本的提升的技术问题,本发明提供了一种电动车控制器的参数优化方法及系统。
2、本发明实施例提供的技术方案如下:
3、第一方面:
4、本发明实施例提供的一种电动车控制器的参数优化方法,包括:
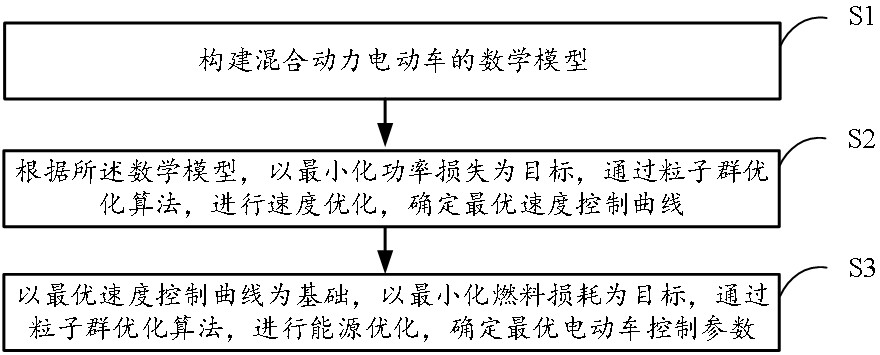
5、s1:构建混合动力电动车的数学模型;
6、所述混合动力电动车包括主动力系统、次动力系统、负载以及车轮,所述主动力系统用于将化学燃料转化为机械能,所述次动力系统用于将电能与机械能进行相互转化,所述主动力系统与所述次动力系统通过所述负载与所述车轮动力连接;
7、s2:根据所述数学模型,以最小化功率损失为目标,通过粒子群优化算法,进行速度优化,确定最优速度控制曲线;
8、s3:以最优速度控制曲线为基础,以最小化燃料损耗为目标,通过粒子群优化算法,进行能源优化,确定最优电动车控制参数。
9、第二方面:
10、本发明实施例提供的一种电动车控制器的参数优化系统,包括:
11、处理器;
12、存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如第一方面所述的电动车控制器的参数优化方法。
13、第三方面:
14、本发明实施例提供的一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的电动车控制器的参数优化方法。
15、本发明实施例提供的技术方案带来的有益效果至少包括:
16、在本发明中,采用两步式优化方案,首先以最小化功率损失为目标,通过粒子群优化算法,进行速度优化,确定出最优速度控制曲线,之后以最优速度控制曲线为基础,以最小化燃料损耗为目标,通过粒子群优化算法,进行能源优化,再确定最优电动车控制参数。简化了计算过程,大幅降低了计算复杂度较高,降低了计算成本,提升了再实际驾驶过程中优化实时性。
技术特征:
1.一种电动车控制器的参数优化方法,其特征在于,包括:
2.根据权利要求1所述的电动车控制器的参数优化方法,其特征在于,所述混合动力电动车的数学模型具体包括:运动学方程、功率分配动态方程、功率分配方案、功率损耗方程、燃料损耗方程以及约束条件。
3.根据权利要求2所述的电动车控制器的参数优化方法,其特征在于,所述运动学方程具体为:
4.根据权利要求2所述的电动车控制器的参数优化方法,其特征在于,所述功率分配动态方程具体为:
5.根据权利要求2所述的电动车控制器的参数优化方法,其特征在于,所述功率损耗方程具体包括:
6.根据权利要求2所述的电动车控制器的参数优化方法,其特征在于,所述燃料损耗方程具体为:
7.根据权利要求2所述的电动车控制器的参数优化方法,其特征在于,所述约束条件具体包括:
8.根据权利要求1所述的电动车控制器的参数优化方法,其特征在于,所述s2具体包括:
9.根据权利要求1所述的电动车控制器的参数优化方法,其特征在于,所述s3具体包括:
10.一种电动车控制器的参数优化系统,其特征在于,包括:
技术总结
本发明提供一种电动车控制器的参数优化方法及系统,涉及电动车技术领域,方法包括:构建混合动力电动车的数学模型;混合动力电动车包括主动力系统、次动力系统、负载以及车轮,主动力系统用于将化学燃料转化为机械能,次动力系统用于将电能与机械能进行相互转化,主动力系统与次动力系统通过负载与车轮动力连接;根据数学模型,以最小化功率损失为目标,通过粒子群优化算法,进行速度优化,确定最优速度控制曲线;以最优速度控制曲线为基础,以最小化燃料损耗为目标,通过粒子群优化算法,进行能源优化,确定最优电动车控制参数。本发明简化了计算过程,大幅降低了计算复杂度较高,降低了计算成本,提升了再实际驾驶过程中优化实时性。
技术研发人员:郭孝天
受保护的技术使用者:无锡钇诚电子科技有限公司
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!