一种平台平衡控制方法、装置、电子设备及存储介质与流程
本发明涉及自动控制,尤其涉及一种平台平衡控制方法、装置、电子设备及存储介质。
背景技术:
1、传统的三点平台升降是通过三个支点来保持运动水平的,其中两个支点位于平台的一侧,另一个支点位于平台的对角线上,当平台升降时,这三个支点的相同速度共同作用,保持井盖在运动过程中保持水平。
2、然而,由于平台在升降过程中只有三个支点,容易受到外部因素的影响而造成不稳定,导致平台在运动过程中晃动或倾斜。
技术实现思路
1、有鉴于此,有必要提供一种平台平衡控制方法、装置、电子设备及存储介质,用以解决三点平台升降过程中受到外部因素的影响,导致三点平台晃动或倾斜的技术问题。
2、为了解决上述问题,本发明提供一种平台平衡控制方法,用于控制三点平台平衡升降,包括:
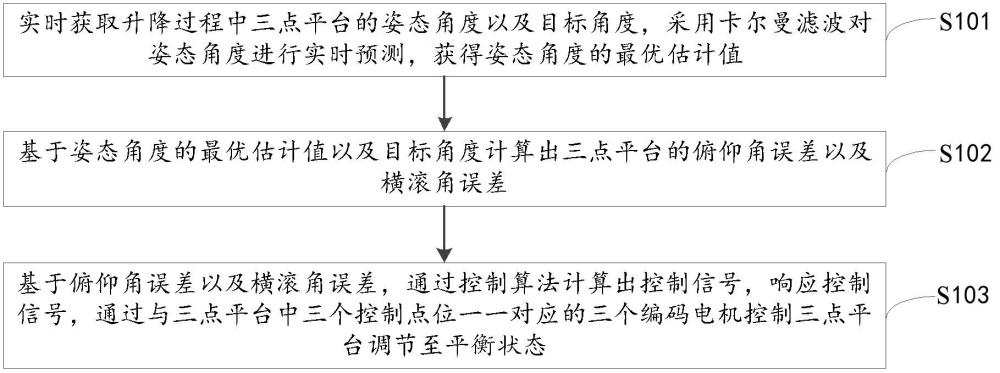
3、实时获取升降过程中三点平台的姿态角度以及目标角度,采用卡尔曼滤波对所述姿态角度进行实时预测,获得所述姿态角度的最优估计值;
4、基于所述姿态角度的最优估计值以及目标角度计算出所述三点平台的俯仰角误差以及横滚角误差;
5、基于所述俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,响应所述控制信号,通过与所述三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态。
6、在一种可能的实现方式中,所述实时获取升降过程中三点平台的姿态角度,包括:
7、通过陀螺仪传感器实时获取三点平台的姿态角度,其中,所述姿态角度包括俯仰角和横滚角。
8、在一种可能得实现方式中,所述采用卡尔曼滤波对所述姿态角度进行实时预测,获得所述姿态角度的最优估计值,包括:
9、构建考虑三点平台平衡状态的状态方程以及以姿态角度为测量向量的测量方程;
10、采用卡尔曼滤波对所述状态方程以及测量方程进行预测,获得当前时刻姿态角度的最优估计值;
11、基于所述当前时刻姿态角度的最优估计值更新所述状态方程,基于所述当前时刻姿态角度的最优估计值、更新后的状态方程以及测量方程获得下一时刻姿态角度的最优估计值,直至所述三点平台处于平衡状态。
12、在一种可能的实现方式中,所述基于所述姿态角度的最优估计值以及目标角度计算出所述三点平台的俯仰角误差以及横滚角误差,包括:
13、基于姿态角度的最优估计值获得所述三点平台的俯仰角以及横滚角,确定目标角度的俯仰角以及横滚角;
14、基于所述三点平台的俯仰角以及目标角度的俯仰角计算出俯仰角误差;
15、基于所述三点平台的横滚角以及目标角度的横滚角计算出横滚角误差。
16、在一种可能的实现方式中,所述控制信号包括第一pwm脉宽、第二pwm脉宽以及第三pwm脉宽;所述基于所述俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,包括:
17、基于所述俯仰角误差,通过pid控制算法计算出第一pwm脉宽;
18、基于所述横滚角误差,通过pid控制算法计算出第三pwm脉宽,其中,所述第二pwm脉宽为固定值。
19、在一种可能的实现方式中,所述第一pwm脉宽的计算式为:
20、,
21、其中,为第一pwm脉宽,为当前时刻横滚角误差,为上一时刻横滚角误差,为比例参数,为微分参数;
22、所述第三pwm脉宽的计算式为:
23、,
24、其中,为第三pwm脉宽,为当前时刻俯仰角误差,为上一时刻俯仰角误差,为比例参数,为微分参数。
25、在一种可能的实现方式中,所述三个编码电机包括第一编码电机、第二编码电机以及第三编码电机,所述第一编码电机对应所述三点平台的第一点位,所述第二编码电机对应所述三点平台的第二点位,所述第三编码电机对应所述三点平台的第三点位;所述响应所述控制信号,通过与所述三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态,包括:
26、基于所述三点平台的姿态角度的最优估计值确定所述三点平台是否处于水平状态,当所述三点平台未处于水平状态时,响应所述控制信号,获得升降过程中第一编码电机的第一pwm脉宽、第二编码电机的第二pwm脉宽以及第三编码电机的第三pwm脉宽;
27、基于所述第二pwm脉宽确定所述第二编码电机的电压信号,基于所述第二编码电机的电压信号确定所述第二编码电机的实际速度,基于所述第二编码电机的实际速度调节所述三点平台的第二点位的升降速度;
28、基于所述第二编码电机的实际速度确定所述第一编码电机的速度,基于所述第一pwm脉宽确定所述第一编码电机的电压信号,基于所述第一编码电机的电压信号、三点平台的俯仰角以及第一编码电机的速度确定所述第一编码电机的实际速度以及平台的第一点位的角度;
29、基于所述第二编码电机的实际速度确定所述第三编码电机的速度,基于所述第三pwm脉宽确定所述第三编码电机的电压信号,基于所述第三编码电机的电压信号、三点平台的横滚角以及第三编码电机的速度确定所述第三编码电机的实际速度以及平台的第三点位的角度;
30、基于所述第二编码电机的实际速度、平台的第一点位的角度以及平台的第三点位的角度控制所述三点平台调节至水平状态。
31、另一方面,本发明还提供一种平台平衡控制装置,用于控制三点平台平衡升降,包括:
32、姿态角度预测模块,用于实时获取升降过程中三点平台的姿态角度以及目标角度,采用卡尔曼滤波对所述姿态角度进行实时预测,获得所述姿态角度的最优估计值;
33、角度误差确定模块,用于基于所述姿态角度的最优估计值以及目标角度计算出所述三点平台的俯仰角误差以及横滚角误差;
34、平衡状态调节模块,用于基于所述俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,响应所述控制信号,通过与所述三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态。
35、另一方面,本发明还提供一种电子设备,包括:处理器和存储器;
36、所述存储器上存储有可被所述处理器执行的计算机可读程序;
37、所述处理器执行所述计算机可读程序时实现如上所述的平台平衡控制方法中的步骤。
38、另一方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现如上所述的平台平衡控制方法中的步骤。
39、本发明的有益效果是:采用卡尔曼滤波对姿态角度进行实时预测,获得姿态角度的最优估计值,降低了外部环境对数据的干扰,基于俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,响应控制信号,通过与三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态,确保了三点平台的稳定性,避免了平台的晃动或倾斜。
技术特征:
1.一种平台平衡控制方法,其特征在于,用于控制三点平台平衡升降,包括:
2.根据权利要求1所述的平台平衡控制方法,其特征在于,所述实时获取升降过程中三点平台的姿态角度,包括:
3.根据权利要求2所述的平台平衡控制方法,其特征在于,所述采用卡尔曼滤波对所述姿态角度进行实时预测,获得所述姿态角度的最优估计值,包括:
4.根据权利要求3所述的平台平衡控制方法,其特征在于,所述基于所述姿态角度的最优估计值以及目标角度计算出所述三点平台的俯仰角误差以及横滚角误差,包括:
5.根据权利要求4所述的平台平衡控制方法,其特征在于,所述控制信号包括第一pwm脉宽、第二pwm脉宽以及第三pwm脉宽;所述基于所述俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,包括:
6.根据权利要求5所述的平台平衡控制方法,其特征在于,所述第一pwm脉宽的计算式为:
7.根据权利要求5所述的平台平衡控制方法,其特征在于,所述三个编码电机包括第一编码电机、第二编码电机以及第三编码电机,所述第一编码电机对应所述三点平台的第一点位,所述第二编码电机对应所述三点平台的第二点位,所述第三编码电机对应所述三点平台的第三点位;所述响应所述控制信号,通过与所述三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态,包括:
8.一种平台平衡控制装置,其特征在于,用于控制平台水平升降至目标位置,包括:
9.一种电子设备,其特征在于,包括存储器和处理器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现如权利要求1-7任意一项所述的平台平衡控制方法中的步骤。
技术总结
本发明涉及一种平台平衡控制方法、装置、电子设备及存储介质,属于自动控制技术领域,其中,平台平衡控制方法,用于控制三点平台平衡升降,该方法包括:实时获取升降过程中三点平台的姿态角度以及目标角度,采用卡尔曼滤波对所述姿态角度进行实时预测,获得所述姿态角度的最优估计值,基于姿态角度的最优估计值以及目标角度计算出三点平台的俯仰角误差以及横滚角误差;基于俯仰角误差以及横滚角误差,通过控制算法计算出控制信号,响应控制信号,通过与三点平台中三个控制点位一一对应的三个编码电机控制所述三点平台调节至平衡状态,确保了三点平台的稳定性,避免了平台的晃动或倾斜。
技术研发人员:肖龙,吴成,项为民,朱纯午,刘天睿,翟佳寅
受保护的技术使用者:武汉道小飞科技有限公司
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!