用于矿山无人驾驶区域的便携式协同系统及工作方法、装置、存储介质与流程
本发明涉及一种用于矿山无人驾驶区域的便携式协同系统及工作方法、装置、存储介质,属于无人驾驶。
背景技术:
1、当前露天矿山无人驾驶系统中,无人驾驶车辆基本上在封闭和半封闭区域内工作,而在无人驾驶车辆作业区域内的辅助车辆均需安装协同系统,协同系统包含定位、显示和通信模块,无人驾驶系统可识别安装协同系统的辅助车辆的位置及状态信息,以保证辅助车辆在无人驾驶区域的安全作业。
2、现有协同系统均加装在辅助车辆,通过支架等形式装配固定于辅助车辆上,适用于固定配合无人驾驶系统的协同车辆,其定位模块、显示模块和通讯模块多为分体式,通过其网络信号将车辆状态位置等信息发生给无人驾驶平台,目前存在如下问题:协同系统与辅助车辆采用一对一固定安装,移动不便且价值量较大,适用于固定配合无人驾驶系统的协同设备。而在矿山实际生产过程中,无人驾驶系统工作区域经常面临检修车、爆破车、洒水车、班车、以及参观车等其他车辆的临时进入,而该类车辆具有临时性和不确定性,如果每台临时车辆都加装协同系统,其经济和时间成本都较高,且协同系统的利用率较低,并且在加装过程中对临时车辆有一定的损伤。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种用于矿山无人驾驶区域的便携式协同系统及工作方法、装置、存储介质,安装方便,有效保证辅助车辆和行人的安全。
2、为了实现上述目的,本发明采用的一种用于矿山无人驾驶区域的便携式协同系统的工作方法,包括以下步骤:
3、s1、将协同系统放置在辅助车辆上或由行人携带,开机,检测网络信号是否正常;
4、s2、设置协同系统的工作模式,所述工作模式包括大型车辆模式、中型车辆模式、小型车辆模式、行人模式或自定义模式,根据不同工作模式,设置不同尺寸的保护包围圈;
5、s3、当携带协同系统的辅助车辆或行人在无人驾驶区域内,协同系统根据无人驾驶车辆的状态和协同系统设置的保护包围圈尺寸,提示操作人员附近的车辆情况,并根据其保护包围圈尺寸,急停进入保护包围圈内的无人驾驶车辆;
6、s4、在协同系统工作过程中如出现故障,显示器显示故障内容并发出声光报警,并根据故障内容等级,提示操作人员谨慎行驶或离开无人驾驶区域;
7、s5、辅助车辆或行人离开无人驾驶区域后,将协同系统关机。
8、在一些实施例中,所述步骤s2中根据设置的工作模式,显示器显示相应的尺寸参数,操作人员确认尺寸参数是否合适。
9、在一些实施例中,所述尺寸参数包括l1、l2、l3、l4、w1、w2或r;
10、其中,l1和l2为协同系统在辅助车辆上的安装位置与车辆前端、尾端的距离,l3为辅助车辆前端与保护包围圈前侧的距离,l4为辅助车辆尾端与保护包围圈后侧的距离,w1和w2为协同系统在辅助车辆上的安装位置与保护包围圈左、右侧的距离;r为行人保护包围圈的半径。
11、在一些实施例中,所述工作模式还包括跟车模式、路径规划及导航模式。
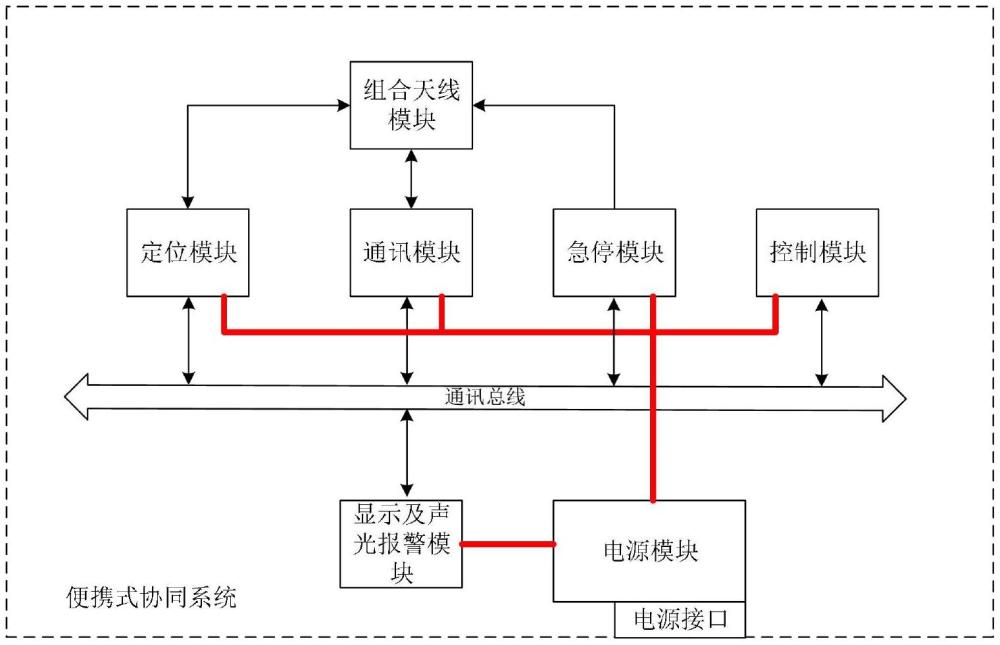
12、本发明的第二方面,提供一种用于矿山无人驾驶区域的便携式协同系统,用以实施所述的工作方法,包括:
13、定位模块,用于接收定位信号和计算协同系统的位置,并将位置信号发送给控制模块;
14、通讯模块,用于协同系统内多个模块之间通信,并将协调设备与无人驾驶云端和无人驾驶车端的数据进行交互通信;
15、急停模块,用于控制车辆进行急停;
16、显示及声光报警模块,用于显示协同系统当前模式和附近无人驾驶车辆的位置,以及发出声光报警信息;
17、控制模块,用于实时分析附近无人驾驶车辆的状态,结合自身位置和速度,计算并动态调整自身保护包围圈的尺寸;并用于根据设置的目标点,结合无人驾驶车辆当前工作状态和当前任务,动态规划辅助车辆的行驶路径、当前推荐速度以及当前推荐车辆位置,并将以上信息通过显示及声光报警模块展示给辅助车辆的司机;
18、组合天线模块,包括gnss天线、5g天线、v2v天线和无线电天线,所述gnss天线用于接收卫星定位信号结合5g天线接收的rtk信号,并将信号传递给定位模块;所述5g天线用于与无人驾驶平台通讯和rtk信号的接收;所述v2v天线用于协同系统与附近的无人驾驶车辆通讯,接收对方车辆信息并发送相关急停信号;所述无线电天线用于将协同系统的急停信号广播到附近无人驾驶车辆;
19、电源模块,用于为定位模块、控制模块、通讯模块、急停模块、显示与声光报警模块提供电源。
20、在一些实施例中,所述v2v天线接收对方的车辆信息,包括车速、方向、载重和坡度信息。
21、在一些实施例中,所述急停模块由操作人员通过按钮触发急停信号,并由组合天线模块的无线电天线发送到附近车辆,该急停信号还通过通讯总线发送到控制模块,由控制模块经通讯模块和组合天线模块发送至附近车辆。
22、在一些实施例中,所述电源模块包括蓄电池和点烟器接头外接电源。
23、在一些实施例中,当携带协同系统的辅助车辆的行驶路径与无人驾驶车辆一致时,选择辅助跟车功能,平台将前方无人驾驶车辆的规划行驶路径、车速、航向角参数发给协同系统显示界面并发送当前辅助车辆的建议车速和建议位置。
24、本发明的第三方面,提供一种用于矿山无人驾驶区域的便携式协同装置,包括:
25、处理器;
26、以及耦接至所述处理器的存储器,用于存储指令,所述指令被所述处理器执行时,使所述处理器执行如所述的用于矿山无人驾驶区域的便携式协同系统的工作方法。
27、本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如所述的用于矿山无人驾驶区域的便携式协同系统的工作方法。
28、与现有技术相比,本发明的有益效果是:
29、1)免安装,只需将协同系统的设备放置在辅助车辆上或行人随身携带即可,移动性强,降低协同系统的需求数量,降低经济成本。
30、2)适配性强,可以适配检修车、爆破车、洒水车、班车、参观车以及行人等不同的作业单元。
31、3)可通过网络、无线电以及v2x等方式同时发出急停信号,提高远程急停功能的可靠性,并在附近的无人驾驶车辆靠近时有声音报警功能,提高辅助车辆的安全性。
32、4)不仅可以配合辅助车辆使用,也可以由进入无人驾驶区域的人员随身携带,可对人员进行安全保护。
技术特征:
1.一种用于矿山无人驾驶区域的便携式协同系统的工作方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于矿山无人驾驶区域的便携式协同系统的工作方法,其特征在于,所述步骤s2中根据设置的工作模式,显示器显示相应的尺寸参数,操作人员确认尺寸参数是否合适。
3.根据权利要求2所述的一种用于矿山无人驾驶区域的便携式协同系统的工作方法,其特征在于,所述尺寸参数包括l1、l2、l3、l4、w1、w2或r;
4.根据权利要求1所述的一种用于矿山无人驾驶区域的便携式协同系统的工作方法,其特征在于,所述工作模式还包括跟车模式、路径规划及导航模式。
5.一种用于矿山无人驾驶区域的便携式协同系统,其特征在于,用以实施权利要求1-4任一项所述的工作方法,包括:
6.根据权利要求5所述的一种用于矿山无人驾驶区域的便携式协同系统,其特征在于,所述v2v天线接收对方的车辆信息,包括车速、方向、载重和坡度信息。
7.根据权利要求5所述的一种用于矿山无人驾驶区域的便携式协同系统,其特征在于,所述急停模块由操作人员通过按钮触发急停信号,并由组合天线模块的无线电天线发送到附近车辆,该急停信号还通过通讯总线发送到控制模块,由控制模块经通讯模块和组合天线模块发送至附近车辆。
8.根据权利要求5所述的一种用于矿山无人驾驶区域的便携式协同系统,其特征在于,所述电源模块包括蓄电池和点烟器接头外接电源。
9.根据权利要求5所述的一种用于矿山无人驾驶区域的便携式协同系统,其特征在于,当携带协同系统的辅助车辆的行驶路径与无人驾驶车辆一致时,选择辅助跟车功能,平台将前方无人驾驶车辆的规划行驶路径、车速、航向角参数发给协同系统显示界面并发送当前辅助车辆的建议车速和建议位置。
10.一种用于矿山无人驾驶区域的便携式协同装置,其特征在于,包括:
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-4中任一项所述的用于矿山无人驾驶区域的便携式协同系统的工作方法。
技术总结
本发明公开一种用于矿山无人驾驶区域的便携式协同系统及工作方法、装置、存储介质,包括:将协同系统放置在辅助车辆上或由行人携带,开机,检测网络信号是否正常;设置协同系统的工作模式,所述工作模式包括大型车辆模式、中型车辆模式、小型车辆模式、行人模式或自定义模式,根据不同工作模式,设置不同尺寸的保护包围圈;协同系统根据无人驾驶车辆的状态和协同系统设置的保护包围圈尺寸,提示操作人员附近的车辆情况,并根据其保护包围圈尺寸,急停进入保护包围圈内的无人驾驶车辆;辅助车辆或行人离开无人驾驶区域后,将协同系统关机。本发明免安装,移动性强,降低协同系统的需求数量,降低经济成本。
技术研发人员:王冠,李志鹏,房康宁,于振华,王鹏,林志明,张培林
受保护的技术使用者:徐州徐工矿业机械有限公司
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!