欠驱动无人艇鲁棒控制方法和装置、系统、存储介质
本发明属于船舶运动控制领域,具体涉及一种欠驱动无人艇鲁棒控制方法和装置、系统、存储介质。
背景技术:
1、进入21世纪以来,海洋已经成为促进世界各国经济发展以及提高国家综合实力的战略要地,伴随着计算机技术和人工智能的飞速发展,无人系统得到了广泛的研究和应用。无人艇作为水面智能装备的代表,拥有良好的水面自主航行能力,被越来越广泛地应用于军民用领域,如海域探测侦察、货物运输、海洋勘探、海上救援等。
2、在各种复杂的任务场景下,可靠的航向控制是无人艇完成自主航行的关键技术。经过多年的发展,相关的控制理论取得了很多有价值的实际应用成果。目前,无人艇航向的控制方法主要包括pid算法、滑模控制、最优控制、反步控制等。然而船舶的运动过程具有非线性和时滞明显等特性,实践发现,上述的控制器难无法满足更高的控制精度和抗风浪要求。在实际工作中,pid依然是应用最广泛的控制方法,但其参数设定对控制有很大影响,当控制对象的动态特性发生变化,必须重新整定控制器参数才能保证控制系统的性能,为了解决这个问题,韩京清教授利用扩张状态观测器提出了自抗扰控制,但是其需要调整的参数众多,难以应用于工程实践,高志强教授基于自抗扰控制开发了线性自抗扰控制器(ladrc),利用线性扩张状态观测器(leso)和状态误差反馈控制律分别估计和消除扰动,已被应用于电力系统、航空航天,船舶工业以及液压系统等控制应用中。
3、常规反步控制方法对于外部干扰敏感,在处理系统中的外界干扰时表现出一定的局限性,当系统受到较大的干扰或不确定性时,反步法的控制性能会受到较大影响。
技术实现思路
1、本发明要解决的技术问题是,提供一种欠驱动无人艇鲁棒控制方法和装置、系统、存储介质,以有效解决无人艇航向控制对于外部干扰的补偿问题,可以对系统中的非线性项以及外部扰动进行准确辨识与估计,从而减小外部干扰对无人艇航向控制精度的影响。
2、为实现上述目的,本发明采用如下的技术方案:
3、一种欠驱动无人艇鲁棒控制方法,包括:
4、步骤s1、构建无人艇的航向控制模型;
5、步骤s2、构建无人艇的舵机模型;
6、步骤s3、构建无人艇在航行过程中受到外部干扰力的干扰模型;
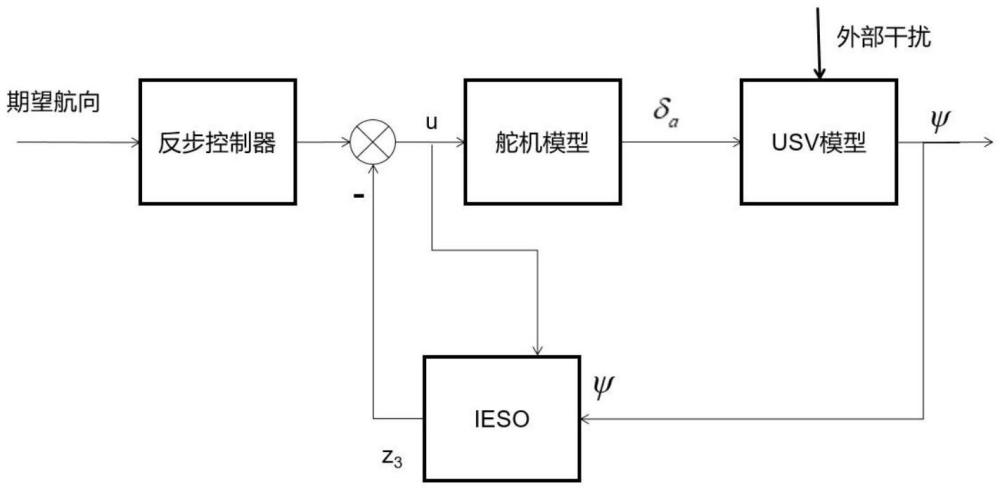
7、步骤s4、根据无人艇的航向控制模型、无人艇的舵机模型和干扰模型,构建改进型扩张状态观测器;
8、步骤s5、根据改进型扩张状态观测器对干扰进行实时补偿。
9、作为优选,步骤s5中,根据李雅普诺夫稳定性原理,对航向控制系统设计反步法控制器,并基于改进型扩张状态观测器对干扰进行实时补偿。
10、作为优选,在改进型扩张状态观测器中,将eso中的fal函数设计为faln函数。
11、本发明还提供一种欠驱动无人艇鲁棒控制装置,包括:
12、第一构建模块,用于构建无人艇的航向控制模型;
13、第二构建模块,用于构建无人艇的舵机模型;
14、第三构建模块,用于构建无人艇在航行过程中受到外部干扰力的干扰模型;
15、第四构建模块,用于根据无人艇的航向控制模型、无人艇的舵机模型和干扰模型,构建改进型扩张状态观测器;
16、控制模块,用于根据改进型扩张状态观测器对干扰进行实时补偿。
17、作为优选,控制模块根据李雅普诺夫稳定性原理,对航向控制系统设计反步法控制器,并基于改进型扩张状态观测器对干扰进行实时补偿。
18、作为优选,在改进型扩张状态观测器中,将eso中的fal函数设计为faln函数。
19、本发明还提供一种欠驱动无人艇鲁棒控制系统,其特征在于,包括:存储器和处理器,所述存储器上存储有由所述处理器运行的计算机程序,所述计算机程序在被所述处理器运行时执行欠驱动无人艇鲁棒控制方法。
20、本发明还提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序在运行时执行欠驱动无人艇鲁棒控制方法。
21、本发明采用改进型扩张状态观测器,只需测量船舶输入信号和航向信号即可实现对非线性与外部干扰集总扰动的有效估计,无需其它测量手段;本发明设计的控制律可以有效实现对外部干扰的补偿,增强航向控制系统的鲁棒性。
技术特征:
1.一种欠驱动无人艇鲁棒控制方法,其特征在于,包括:
2.如权利要求1所述的欠驱动无人艇鲁棒控制方法,其特征在于,步骤s5中,根据李雅普诺夫稳定性原理,对航向控制系统设计反步法控制器,并基于改进型扩张状态观测器对干扰进行实时补偿。
3.如权利要求1所述的欠驱动无人艇鲁棒控制方法,其特征在于,在改进型扩张状态观测器中,将eso中的fal函数设计为faln函数。
4.一种欠驱动无人艇鲁棒控制装置,其特征在于,包括:
5.如权利要求4所述的欠驱动无人艇鲁棒控制装置,其特征在于,控制模块根据李雅普诺夫稳定性原理,对航向控制系统设计反步法控制器,并基于改进型扩张状态观测器对干扰进行实时补偿。
6.如权利要求5所述的欠驱动无人艇鲁棒控制装置,其特征在于,在改进型扩张状态观测器中,将eso中的fal函数设计为faln函数。
7.一种欠驱动无人艇鲁棒控制系统,其特征在于,包括:存储器和处理器,所述存储器上存储有由所述处理器运行的计算机程序,所述计算机程序在被所述处理器运行时执行如权利要求1-3中的任一项所述的欠驱动无人艇鲁棒控制方法。
8.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序在运行时执行如权利要求1-3中的任一项所述的欠驱动无人艇鲁棒控制方法。
技术总结
本发明公开一种欠驱动无人艇鲁棒控制方法和装置、系统、存储介质,根据无人艇的航向、运动姿态与舵角等测量传感器测量信号,针对外部作用下的采用改进ESO与反步控制结合的方法,实现随机干扰状态下无人艇基于动态补偿下的无人艇水面控制。采用本发明的技术方案,实现外部扰动准确辨识与估计,通过动态补偿,可有效解决受随机干扰影响下的无人艇航向控制的鲁棒性问题,从而提升无人艇航向控制精度和自适应能力。
技术研发人员:袁剑平,柴卓辉,陈庆东,钟耀鹏,罗智洵,李佳韵,陈庆龙,董智惠
受保护的技术使用者:广东海洋大学
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!