无人机护岸巡查避障方法及计算机可读存储介质与流程
本发明涉及无人机控制,尤其涉及一种无人机护岸巡查避障方法及计算机可读存储介质。
背景技术:
1、河道护岸是水环境和人类活动区域的重要分界线,是水域岸线空间管控和生态治理的重点对象。安排人员对护岸健康进行巡查费时费力,视频监控站点对护岸的覆盖范围也极其有限。使用无人机在河面上沿河道飞行,可以清晰地观察到护岸的正面,且能够覆盖到整段河道,做到真正的无死角监控,是这种巡查任务的最佳选择。无人机沿河道进行护岸巡查,关注的目标包括是否存在护岸损毁、坡面杂草生长、杂物堆放侵占等护岸健康情况,也可以包含水面污染、人员违规行为的监测内容。得益于计算机图像处理和人工智能技术的飞速发展,这些监测任务都可以通过计算机算法替代人眼完成,且识别到的事件信息如位置坐标、严重程度、拍照取证等都可以实时上报河道管理者,实现高效的监管治理。小型河道尤其是城市内河的环境复杂,无人机既要保证安全稳定地向预定方向前进,也要兼顾拍摄的护岸画面清晰稳定,有一定的角度和距离要求,并不容易操作。
技术实现思路
1、本发明所要解决的技术问题是:提供一种无人机护岸巡查避障方法及计算机可读存储介质,可实现无人机的自主巡岸及避障,无需预先设定路线,节约人工成本,且可保证无人机的飞行安全性。
2、为了解决上述技术问题,本发明采用的技术方案为:一种无人机护岸巡查避障方法,包括:
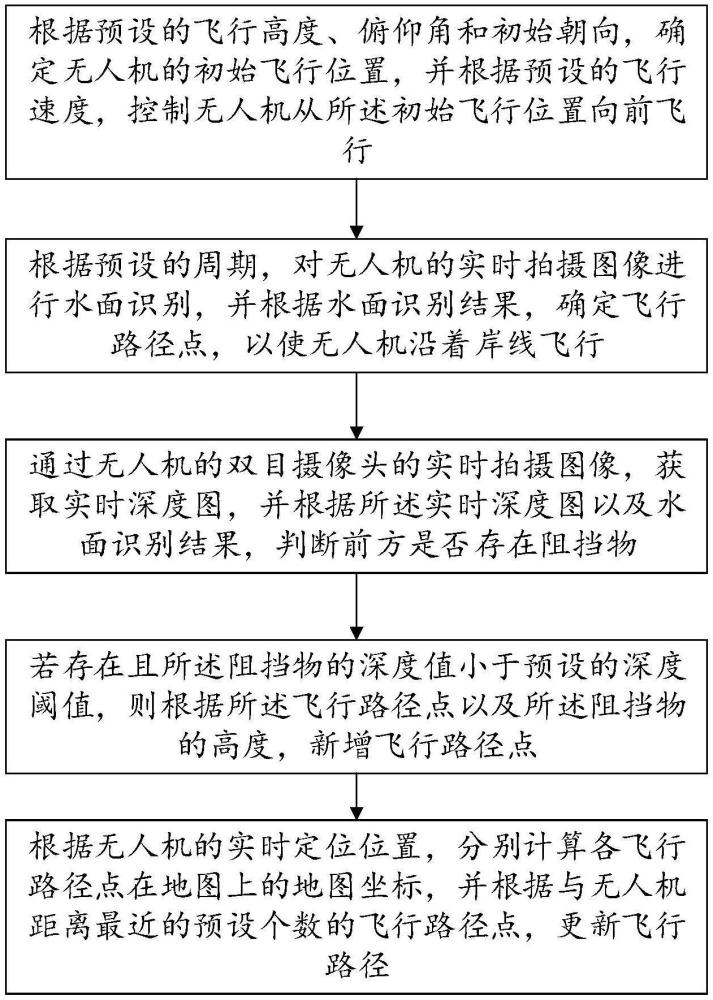
3、根据预设的飞行高度、俯仰角和初始朝向,确定无人机的初始飞行位置,并根据预设的飞行速度,控制无人机从所述初始飞行位置向前飞行;
4、根据预设的周期,对无人机的实时拍摄图像进行水面识别,并根据水面识别结果,确定飞行路径点,以使无人机沿着岸线飞行;
5、通过无人机的双目摄像头的实时拍摄图像,获取实时深度图,并根据所述实时深度图以及水面识别结果,判断前方是否存在阻挡物;
6、若存在且所述阻挡物的深度值小于预设的深度阈值,则根据所述飞行路径点以及所述阻挡物的高度,新增飞行路径点;
7、根据无人机的实时定位位置,分别计算各飞行路径点在地图上的地图坐标,并根据与无人机距离最近的预设个数的飞行路径点,更新飞行路径。
8、本发明还提出一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上所述的方法。
9、本发明的有益效果在于:通过在飞行过程中实时根据拍摄图像的水面识别结果来确定后续的飞行路径点,使得无人机可自动地沿着水域岸线飞行,无需人为设定路线,相较划定的固定巡航路线,可在新环境或临时巡查场景下具有更大的便利性;同时,通过实时检测前方是否存在阻挡物,并在靠近阻挡物时,根据当前的飞行路径点以及阻挡物的高度,新增飞行路径点,以使无人机可沿着当前飞行路径飞越阻挡物,从而实现自动避障,有效保证无人机的安全性。
技术特征:
1.一种无人机护岸巡查避障方法,其特征在于,包括:
2.根据权利要求1所述的无人机护岸巡查避障方法,其特征在于,在无人机飞行过程中的一时刻,以无人机在水面所在的平面上的垂直投影位置点作为原点,以水面所在的平面为xoy平面,以无人机摄像头的朝向为y轴方向,以垂直方向为z轴方向,构建所述一时刻对应的世界坐标系。
3.根据权利要求2所述的无人机护岸巡查避障方法,其特征在于,所述根据预设的周期,对无人机的实时拍摄图像进行水面识别,并根据水面识别结果,确定飞行路径点,以使无人机沿着岸线飞行,包括:
4.根据权利要求3所述的无人机护岸巡查避障方法,其特征在于,若初始朝向为无人机朝河心方向起飞后的右侧方向,则近岸点集合为右岸点集合,所述对岸点集合为左岸点集合;若初始朝向为无人机朝河心方向起飞后的左侧方向,则近岸点集合为左岸点集合,所述对岸点集合为右岸点集合;
5.根据权利要求3所述的无人机护岸巡查避障方法,其特征在于,所述近岸点集合中的一轮廓点对应的飞行路径点在当前世界坐标系中的世界坐标ti=(xti,yti,h0),
6.根据权利要求1所述的无人机护岸巡查避障方法,其特征在于,所述根据所述飞行路径点以及所述阻挡物的高度,新增飞行路径点之前,进一步包括:
7.根据权利要求3所述的无人机护岸巡查避障方法,其特征在于,所述根据所述实时深度图以及水面识别结果,判断前方是否存在阻挡物,包括:
8.根据权利要求7所述的无人机护岸巡查避障方法,其特征在于,所述根据所述飞行路径点以及所述阻挡物的高度,新增飞行路径点,包括:
9.根据权利要求8所述的无人机护岸巡查避障方法,其特征在于,所述根据所述第一轮廓点在当前世界坐标系中的世界坐标、所述阻挡物的顶部y值以及当前飞行高度和俯仰角,估算所述阻挡物的高度之前,进一步包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-9任一项所述的方法。
技术总结
本发明公开了一种无人机护岸巡查避障方法及计算机可读存储介质,方法包括:确定无人机的初始飞行位置并控制无人机从初始飞行位置向前飞行;根据预设的周期,对无人机的实时拍摄图像进行水面识别,并根据水面识别结果,确定飞行路径点,以使无人机沿着岸线飞行;根据实时深度图以及水面识别结果,判断前方是否存在阻挡物;若存在且阻挡物的深度值小于预设的深度阈值,则根据阻挡物的高度,新增飞行路径点;根据无人机的实时定位位置,分别计算各飞行路径点在地图上的地图坐标,并根据与无人机距离最近的预设个数的飞行路径点,更新飞行路径。本发明可实现无人机的自主巡岸及避障。
技术研发人员:吴闽帆,王文山,苏康建,汤辉,陈博嘉,陈固煟,戴在林
受保护的技术使用者:四创科技有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!