一种养殖场智能巡检车的避障方法及系统
本发明属于自动避障,尤其涉及一种养殖场智能巡检车的避障方法及系统。
背景技术:
1、随着规模化笼养家禽养殖技术和舍内农用技术装备的快速发展,舍内移动机器人的应运而生。移动机器人因为其行动灵活、对地面环境适应性强、成本较低且具有获取养殖场内整体信息和局部具体信息的能力,在养殖场中具有丰富的应用。由于养殖场内环境比较复杂,移动机器人的作业的时候难免会遇到各类型的障碍物,有不同尺寸的、静态抑或动态的障碍物,静态的例如笼柱、货物箱、喂料机等;动态障碍物则包括舍内的工作人员等一切有运动速度和加速度的人或物。为提高效率,保障人员物资安全,移动机器人避障具有很高的实用意义。
2、目前养殖场用的移动机器人主要使用基于单一主动传感器的被动停止避让,即使用超声传感器、激光雷达、红外传感器等主动发出信号,接收返回信号的传感器数据,当数据达到某一阈值时立刻停止行动,等待障碍物消失或转为人为引导。由于受到传感器获取信息不完整的劣势限制,灵活性较低,作业效率也受到较大影响。
技术实现思路
1、为解决上述技术问题,本发明提出了一种养殖场智能巡检车的避障方法及系统,以解决上述现有技术存在的问题。
2、为实现上述目的,本发明提供了一种养殖场智能巡检车的避障方法,包括:
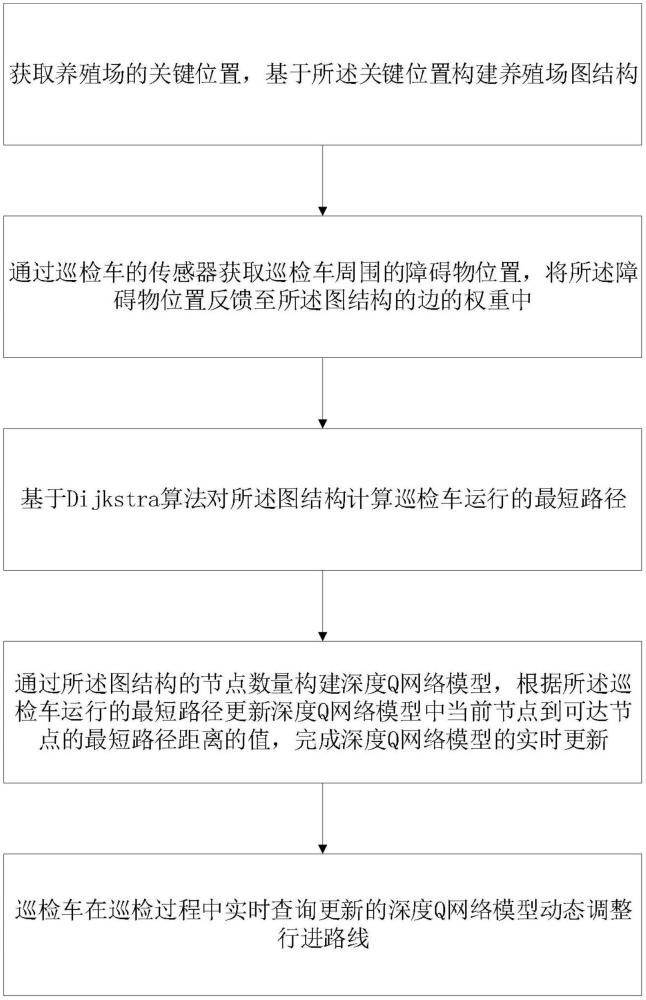
3、获取养殖场的关键位置,基于所述关键位置构建养殖场图结构;
4、通过巡检车的传感器获取巡检车周围的障碍物位置,将所述障碍物位置反馈至所述图结构的边的权重中;
5、基于dijkstra算法对所述图结构计算巡检车运行的最短路径;
6、通过所述图结构的节点数量构建深度q网络模型,根据所述巡检车运行的最短路径更新深度q网络模型中当前节点到可达节点的最短路径距离的值,完成深度q网络模型的实时更新;
7、巡检车在巡检过程中实时查询更新的深度q网络模型动态调整行进路线。
8、优选地,所述获取养殖场地图的关键位置,基于所述关键位置构建养殖场图结构的过程包括:
9、定义养殖场的关键位置,将所述关键位置定义为图的节点;
10、基于实际的可达性和连接情况在图的节点间定义边,构建养殖场图结构。
11、优选地,所述通过巡检车的传感器获取巡检车周围的障碍物位置,将所述障碍物位置反馈至所述图结构的边的权重中的过程包括:
12、在巡检车上安装传感器,基于所述传感器获取巡检车周边环境数据;
13、通过机器视觉方法对所述周边环境数据进行识别,获得周边障碍物位置数据;
14、检测到的周边障碍物位置数据转换成图中的权重或边的改变,并反馈至所述图结构中进行更改。
15、优选地,基于dijkstra算法对所述图结构计算巡检车运行的最短路径的过程包括:
16、对所述图结构的内一个节点作为起点,初始化距离数组,记录起点到其他所有节点的最短距离,起始时,除了起点到自身的距离为0外,起点到其他所有节点的最短距离都设为无穷大;
17、从起点开始,逐步探索所有未处理的节点,选择距离最短的节点,确认此路径为巡检车运行的最短路径,并更新其相邻节点的最短路径距离。
18、优选地,所述通过所述图结构的节点数量构建深度q网络模型的过程包括:
19、基于所述节点数量构建巡检车可用的动作空间,基于全连接神经网络和所述巡检车可用的动作空间构建q网络模型,将巡检车状态表示作为所述q网络模型的输入,输出为每个动作的q值;
20、构建所述q网络模型的损失函数,所述损失函数为q-learning算法中的目标函数;
21、基于经验回放和目标网络对所述q网络模型进行训练,所述q网络模型通过与环境的交互学习最优的动作策略,以最大化长期累积奖励,生成所述深度q网络模型。
22、优选地,所述完成深度q网络模型的实时更新的过程包括:
23、通过所述dijkstra算法对所述图结构计算巡检车运行的最短路径作为即时奖励的负值对所述深度q网络模型中相应的参数进行更新,使深度q网络模型中通过巡检车行驶动作到达避障状态的成本最小化。
24、优选地,巡检车在巡检过程中实时查询更新的深度q网络模型动态调整行进路线的过程包括:
25、巡检车实时获取周边环境信息;
26、将所述周边环境信息转化为形态特征后输入至所述深度q网络模型生成局部指引路径;
27、重复获取所述局部指引路径,生成规划路线,基于所述规划路线调整巡检车行进路线。
28、优选地,基于所述规划路线调整巡检车行进路线的过程还包括:
29、若形态特征与所述图结构的关键节点存在差异,则判断为新的障碍物出现或原有路径不再可行,则重新运行dijkstra算法更新受影响的部分路径,并相应地调整深度q网络模型。
30、为实现上述目的,本发明还提供了一种养殖场智能巡检车的避障系统,包括:
31、构建子系统,用于获取养殖场的关键位置,基于所述关键位置构建养殖场图结构;
32、反馈子系统,用于通过巡检车的传感器获取巡检车周围的障碍物位置,将所述障碍物位置反馈至所述图结构的边的权重中;
33、计算子系统,用于基于dijkstra算法对所述图结构计算巡检车运行的最短路径;
34、更新子系统,用于通过所述图结构的节点数量构建深度q网络模型,根据所述巡检车运行的最短路径更新深度q网络模型中当前节点到可达节点的最短路径距离的值,完成深度q网络模型的实时更新;
35、调整子系统,用于巡检车在巡检过程中实时查询更新的深度q网络模型动态调整行进路线。
36、与现有技术相比,本发明具有如下优点和技术效果:
37、本发明中dijkstra算法为找到从起点到终点的最短路径提供了有效的解决方案。通过这种方式,可以快速计算出最优的避障路线,减少巡检车行驶的总距离和时间。结合深度q网络可以实现在动态环境中对避障路线的实时调整,使巡检车能够灵活应对突发情况,如动物的移动或新的障碍出现。深度q网络通过从大量的历史数据中学习,能够识别复杂的模式和关系。将深度q网络用于处理那些需要复杂决策和预测的场景,在不断变化的养殖场环境中,这能显著提升巡检车避障的自主性和效率。
技术特征:
1.一种养殖场智能巡检车的避障方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的养殖场智能巡检车的避障方法,其特征在于,所述获取养殖场地图的关键位置,基于所述关键位置构建养殖场图结构的过程包括:
3.根据权利要求1所述的养殖场智能巡检车的避障方法,其特征在于,所述通过巡检车的传感器获取巡检车周围的障碍物位置,将所述障碍物位置反馈至所述图结构的边的权重中的过程包括:
4.根据权利要求1所述的养殖场智能巡检车的避障方法,其特征在于,基于dijkstra算法对所述图结构计算巡检车运行的最短路径的过程包括:
5.根据权利要求1所述的养殖场智能巡检车的避障方法,其特征在于,所述通过所述图结构的节点数量构建深度q网络模型的过程包括:
6.根据权利要求4所述的养殖场智能巡检车的避障方法,其特征在于,所述完成深度q网络模型的实时更新的过程包括:
7.根据权利要求1所述的养殖场智能巡检车的避障方法,其特征在于,巡检车在巡检过程中实时查询更新的深度q网络模型动态调整行进路线的过程包括:
8.根据权利要求7所述的养殖场智能巡检车的避障方法,其特征在于,基于所述规划路线调整巡检车行进路线的过程还包括:
9.一种养殖场智能巡检车的避障系统,其特征在于,包括:
技术总结
本发明公开了一种养殖场智能巡检车的避障方法及系统,属于自动避障技术领域,包括:获取养殖场的关键位置,基于所述关键位置构建养殖场图结构;通过巡检车的传感器获取巡检车周围的障碍物位置,将所述障碍物位置反馈至所述图结构的边的权重中;基于Dijkstra算法对所述图结构计算巡检车运行的最短路径;通过所述图结构的节点数量构建深度Q网络模型,根据所述巡检车运行的最短路径更新深度Q网络模型中当前节点到可达节点的最短路径距离的值,完成深度Q网络模型的实时更新;巡检车在巡检过程中实时查询更新的深度Q网络模型动态调整行进路线。本发明可以快速计算出最优的行驶路线,减少巡检车行驶的总距离和时间。
技术研发人员:周梦婷,唐湘方,熊本海,郑姗姗,李志虎
受保护的技术使用者:中国农业科学院北京畜牧兽医研究所
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!