一种基于大模型的无人机智能自适应调度方法及系统与流程
本发明属于大模型,具体为一种基于大模型的无人机智能自适应调度方法及系统。
背景技术:
1、近年来,随着全球科技的飞速发展,无人机技术经历了显著的飞跃。这一技术已经广泛应用于农林牧业、环境监测、地理测绘、灾害响应、科学研究等多个领域,不仅极大地提升了工作效率,还拓展了应用范围,为产业创新注入了新的活力。无人机在农业领域用于作物监测、施肥、喷洒农药等,提高了农业生产效率和作物质量;在环境监测方面,无人机搭载传感器进行空气质量检测、水质监测等,为环境保护和气候变化研究提供了有力支持;在地理测绘中,无人机提供了高精度的空间数据,促进了城市规划和土地利用的可持续发展。展望未来,无人机技术将在更广泛的领域得到更加深入的应用。随着智能化技术的不断进步,无人机系统将得到进一步的智能化赋能,具备更高的自主化能力。无人机系统的发展趋势表现为环境感知自主精准、任务设计自主高效、任务规划自主科学、任务执行自主灵活、任务评估自主快捷等,这将极大地提升无人机的工作效率和执行能力。可以预见,在未来,无人机将在各个领域发挥更加重要的作用,为人类社会的发展带来更多的便利和创新。
2、当前,无人机系统在技术上已取得显著进步,集成了众多先进的智能化算法,如航路规划、目标识别、飞行控制等。这些算法大大提升了无人机的操作效率和精准性,使其能在复杂环境中灵活自如地执行任务。然而,尽管智能化水平提升,无人机系统的任务执行过程目前仍然离不开人工干预。操作员需根据实时场景对算法进行调度,确保无人机能妥善应对各种突发情况。这就意味着,无人机尚未达到完全智能化和自主化的目标,仍然需要依赖人的判断和决策。
3、当前阶段,大模型技术引起各方广泛关注,这项技术已经具备了较强的语言理解和文本生成能力,其潜力与应用前景备受期待。尽管大型通用模型在语言理解和生成方面展现出强大的能力,但在处理特定任务时,其表现往往不及专用模型。例如,在缺乏专业工具支持的情况下,大型模型难以直接解决路径规划等复杂问题,而仅能提供参考性建议。
技术实现思路
1、本发明的目的在于提供一种基于大模型的无人机智能自适应调度方法及系统,实现无人机系统的完全自主任务执行,提高对小模型的调度和管理能力,提升智能化水平。
2、实现本发明目的的技术解决方案为:一种基于大模型的无人机智能自适应调度方法,包括步骤:
3、s1),针对无人机系统的特定任务需求和计算资源,进行大模型的选型,对选定的大模型进行特定任务领域的微调;
4、s2),在无人机系统中集成执行不同任务需求的多种专业模型;
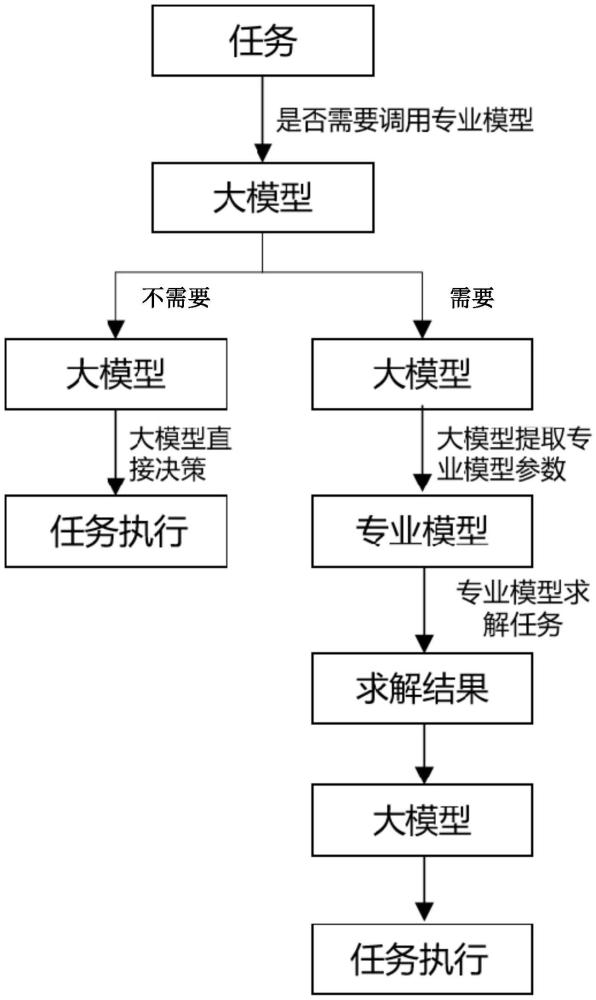
5、s3),面对不同任务场景,大模型解析判断是否需要激活特定专业模型,在需要时选择专业模型进行任务处理;
6、s4),大模型确认需调用的专业模型,基于收集到的环境信息和任务指令,自动提取并传递所需参数给专业模型;
7、s5),专业模型接收大模型传递的参数信息,执行相应的子任务,并将执行结果反馈给大型模型,使大模型进行持续的学习优化。
8、进一步地,所述针对无人机系统的特定任务需求和计算资源,进行大模型的选型包括:1张a800计算卡选择60亿和130亿参数量的大模型,2张以上的a800计算卡选择650亿与720亿参数量的大模型。
9、进一步地,步骤s1)中对选定的大模型进行特定任务领域的微调具体包括:采用基于低秩矩阵分解的参数高效微调方法进行大模型的垂直领域微调,低秩矩阵分解冻结预训练大模型权重,并将可训练的秩分解矩阵注入到大模型的transformer层的每个权重中。
10、进一步地,所述权重为:
11、wh=wh-1+δw
12、进一步地,所述专业模型包括目标识别、航路规划和博弈对抗算法。
13、进一步地,所述步骤s3)具体包括:
14、步骤s31),环境信息与任务评估,通过分析环境信息,明确无人机系统需要执行的任务;
15、步骤s32),采用训练好的大模型解析判断是否需要激活特定专业模型,在需要时选择专业模型进行任务处理。
16、进一步地,所述大模型的训练包括:大模型激活规则训练,通过数据集对大模型训练,使大模型学到面对何种作战任务时需要激活专业模型,并通过引入新的特定任务数据和反馈,对大模型进行持续的训练优化。
17、进一步地,所述大模型和专业模型之间采用标准化的接口协议进行数据传输,传输数据按照预定的数据结构进行封装。
18、一种基于大模型的无人机智能自适应调度系统,包括:
19、大模型训练单元,通过数据集对大模型训练,使大模型学到面对何种作战任务时需要激活专业模型,并通过引入新的特定任务数据和反馈,对大模型进行持续的训练优化;
20、大模型激活单元,面对不同任务场景,大模型解析判断是否需要激活特定专业模型,在需要时选择专业模型进行任务处理;
21、专业模型单元,接收大模型传递的参数信息,执行相应的子任务,并将执行结果反馈给大模型训练单元,使大模型进行持续的学习优化;
22、人工选择单元,在大模型激活单元判断错误或者选择专业模型错误时,用于修改大模型激活单元的判断或者选择的专业模型,并将修改结果反馈给大模型训练单元,使大模型进行持续的学习优化。
23、一种计算机存储介质,所述计算机存储介质存储有可执行程序,所述可执行程序被处理器执行实现所述的无人机智能自适应调度方法的步骤。
24、与现有技术相比,本发明的有益效果为:本发明将大模型技术融入无人机系统中,使得大模型能够根据外部实时环境态势和具体任务类型,自适应地调用无人机系统内置的专业算法模型,包括目标识别、航路规划、飞行控制算法等;本发明通过集成大模型技术,无人机系统能够更加智能地应对各种复杂环境,根据任务需求,灵活地调用相应的算法模型,以优化任务执行过程;本发明采用大模型技术能够高效处理多模态数据,快速做出决策,提高无人机系统的反应速度和执行能力;本发明方法在实际应用中,无人机能够更快地完成任务,并提高任务完成的准确性和可靠性。
技术特征:
1.一种基于大模型的无人机智能自适应调度方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述针对无人机系统的特定任务需求和计算资源,进行大模型的选型包括:1张a800计算卡选择60亿和130亿参数量的大模型,2张以上的a800计算卡选择650亿与720亿参数量的大模型。
3.根据权利要求1所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,步骤s1)中对选定的大模型进行特定任务领域的微调具体包括:采用基于低秩矩阵分解的参数高效微调方法进行大模型的垂直领域微调,低秩矩阵分解冻结预训练大模型权重,并将可训练的秩分解矩阵注入到大模型的transformer层的每个权重中。
4.根据权利要求3所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述权重的更新为:
5.根据权利要求1所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述专业模型包括目标识别、航路规划和博弈对抗算法。
6.根据权利要求1所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述步骤s3)具体包括:
7.根据权利要求6所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述大模型的训练包括:大模型激活规则训练,通过数据集对大模型训练,使大模型学到面对何种作战任务时需要激活专业模型,并通过引入新的特定任务数据和反馈,对大模型进行持续的训练优化。
8.根据权利要求1所述的一种基于大模型的无人机智能自适应调度方法,其特征在于,所述大模型和专业模型之间采用标准化的接口协议进行数据传输,传输数据按照预定的数据结构进行封装。
9.一种实现权利要求1-8任一所述方法的基于大模型的无人机智能自适应调度系统,其特征在于,包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有可执行程序,所述可执行程序被处理器执行实现权利要求1-8任一项所述的无人机智能自适应调度方法的步骤。
技术总结
本发明提出一种基于大模型的无人机智能自适应调度方法及系统,该方法包括步骤:针对无人机系统的特定任务需求和计算资源,进行大模型的选型,对选定的大模型进行特定任务领域的微调;在无人机系统中集成执行不同任务需求的多种专业模型;面对不同任务场景,大模型解析判断是否需要激活特定专业模型,在需要时选择专业模型进行任务处理;大模型确认需调用的专业模型,基于收集到的环境信息和任务指令,自动提取并传递所需参数给专业模型;专业模型接收大模型传递的参数信息,执行相应的子任务,并将执行结果反馈给大型模型,使大模型进行持续的学习优化。本发明使无人机能够更快地完成任务,并提高任务完成的准确性和可靠性。
技术研发人员:何龙,刘林,毛喜旺,梁子敬,付强,尚鹏辉,王晖
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!