马达的控制方法及控制装置与流程
本申请实施例涉及电子设备,尤其涉及一种马达的控制方法及控制装置。
背景技术:
1、近年来,随着科学技术的发展,摄像头在手持设备、无人机等应用中日益广泛,对拍摄图像的清晰度要求也越来越高。
2、光学防抖(optical image stabilization,ois)技术是提高照片清晰度的重要技术之一。其利用镜头内部的稳定器或可移动式镜头模块,根据抖动情况实时调整镜头位置,从而保持图像的稳定性,减少模糊和抖动。
3、但是,在调整镜头的过程中,马达可能会存在打边等异常现象。其中,马达打边是指马达在运行过程中转子或定子边缘发生撞击或摩擦。若马达频繁打边,则会对其内部零部件造成严重的磨损和损伤,特别是转子边缘和定子内壁等直接接触的部位,还可能引发更严重的故障,如轴承损坏、线圈烧毁等,使得马达的寿命将大大缩短。
技术实现思路
1、有鉴于此,本申请实施例提供一种马达的控制方法及控制装置。
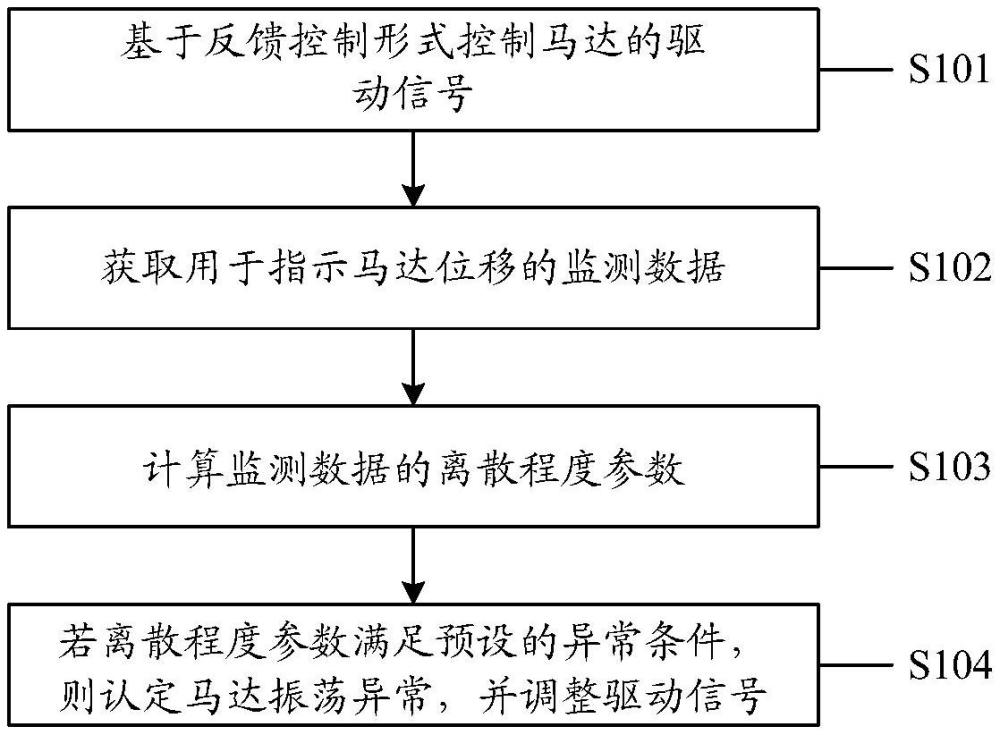
2、本申请实施例提供一种马达的控制方法,包括:基于反馈控制形式控制马达的驱动信号;获取用于指示马达位移的监测数据;计算监测数据的离散程度参数;若离散程度参数满足预设的异常条件,则认定马达振荡异常,并调整驱动信号。
3、在一些实施例中,马达的控制方法还包括:若离散程度参数不满足异常条件,则维持反馈控制形式控制驱动信号。
4、在一些实施例中,调整驱动信号,包括:
5、降低驱动激励;
6、和/或者,开环控制形式控制驱动信号。
7、在一些实施例中,马达的控制方法还包括:若离散程度参数满足异常条件的次数小于预设的异常次数阈值,降低驱动激励;若离散程度参数满足异常条件的次数等于预设的异常次数阈值,则切换为开环控制形式控制驱动信号。
8、在一些实施例中,离散程度参数包括:监测数据的离散程度占比;计算监测数据的离散程度参数包括:计算监测数据的标准差与极差的比值,得到离散程度占比。
9、在一些实施例中,若离散程度参数满足预设的异常条件,则认定马达振荡异常,并调整驱动信号的方法,包括:若离散程度占比大于或等于第一预设阈值,则调整驱动信号;其中,第一预设阈值由反馈控制形式的性能指标确定。
10、在一些实施例中,反馈控制形式的性能指标包括:稳定时间;马达的控制方法还包括:根据稳定时间确定最大调节频率;将最大调节频率对应的离散程度占比,确定为第一预设阈值。
11、在一些实施例中,离散程度参数包括:监测数据的极差;计算监测数据的离散程度参数的方法,包括:计算监测数据的最大值与最小值的差值,得到极差。
12、在一些实施例中,若离散程度参数满足预设的异常条件,则认定马达振荡异常,并调整驱动信号的方法,包括:若极差大于或等于第二预设阈值,则更新预设极值计数器的数值;响应于极值计数器的数值大于或等于第三预设阈值,则调整驱动信号,并对极值计数器的数值清零。
13、在一些实施例中,马达的控制方法还包括:获取时段数据,时段数据为获取的马达位移的监测数据截取分段时长内监测数据;其中,分段时长根据反馈控制形式对应的最大调节频率和/或预设的抖动频率确定;计算监测数据的离散程度参数的方法包括:计算时段数据的离散程度参数。
14、本申请实施例还提供一种马达的控制装置,控制装置包括:第一控制模块,用于基于反馈控制形式控制马达的驱动信号;获取模块,用于获取用于指示马达位移的监测数据;计算模块,用于计算监测数据的离散程度参数;第二控制模块,用于若离散程度参数满足预设的异常条件,则认定马达振荡异常,并调整驱动信号。
15、在一些实施例中,第一控制模块还用于若离散程度参数不满足异常条件,则维持反馈控制形式控制驱动信号。
16、在一些实施例中,第二控制模块具体用于降低驱动激励;或者,第二控制模块具体用于切换为开环控制形式控制驱动信号。
17、在一些实施例中,马达的控制装置还包括:第三控制模块,用于若离散程度参数满足异常条件的次数等于预设的异常次数阈值,则切换为开环控制形式控制驱动信号;第一控制模块具体用于若离散程度参数不满足异常条件,则清零异常次数。
18、在一些实施例中,离散程度参数包括:监测数据的离散程度占比;计算模块具体用于计算监测数据的标准差与极差的比值,得到离散程度占比。
19、在一些实施例中,第二控制模块具体用于若离散程度占比大于或等于第一预设阈值,则调整驱动信号;其中,第一预设阈值由反馈控制形式的性能指标确定。
20、在一些实施例中,反馈控制形式的性能指标包括:稳定时间;控制装置还包括预设模块,用于根据稳定时间确定最大调节频率;并将最大调节频率对应的离散程度占比,确定为第一预设阈值。
21、在一些实施例中,离散程度参数包括:监测数据的极差;计算模块具体用于计算监测数据的最大值与最小值的差值,得到极差。
22、在一些实施例中,第二控制模块具体用于若极差大于或等于第二预设阈值,则更新预设计数器的数值;响应于计数器的数值大于或等于第三预设阈值,则调整驱动信号,并对计数器的数值清零。
23、在一些实施例中,获取模块具体用于获取时段数据,时段数据为获取的马达位移的监测数据截取分段时长内监测数据;其中,分段时长根据反馈控制形式对应的最大调节频率和/或预设的抖动频率确定;计算模块具体用于计算时段数据的离散程度参数。
24、本申请实施例还提供一种电子设备,包括:处理器和用于存储在处理器上运行计算机指令的存储器;处理器用于在运行计算机指令时,执行上述的马达的控制方法。
25、本申请实施例中的马达的控制方法,获取用于指示马达位移的监测数据,并通过计算离散程度参数识别监测数据的离散程度,根据离散程度参数与预设的异常条件的比较情况,判断马达是否出现振荡异常或打边现象。若监测数据的离散程度参数满足预设的异常条件,则及时调整马达的驱动信号,减少马达异常运行的时间,提高马达运行的平稳性,增加马达的使用寿命。
技术特征:
1.一种马达的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,还包括:
3.根据权利要求1所述的控制方法,其特征在于,所述调整所述驱动信号,包括:
4.根据权利要求3所述的控制方法,其特征在于,所述调整所述驱动信号,具体包括:
5.根据权利要求1至4任一所述的控制方法,其特征在于,所述离散程度参数包括:所述监测数据的离散程度占比;
6.根据权利要求5所述的控制方法,其特征在于,所述若所述离散程度参数满足预设的异常条件,则认定所述马达振荡异常,并调整所述驱动信号,包括:
7.根据权利要求6所述的控制方法,其特征在于,所述反馈控制形式的性能指标包括:稳定时间;
8.根据权利要求1至4任一所述的控制方法,其特征在于,所述离散程度参数包括:所述监测数据的极差;
9.根据权利要求1至4任一所述的控制方法,其特征在于,所述控制方法还包括:
10.一种马达的控制装置,其特征在于,包括:
技术总结
本申请实施例提供一种马达的控制方法及控制装置,所述控制方法包括:基于反馈控制形式控制所述马达的驱动信号;获取用于指示所述马达位移的监测数据;计算所述监测数据的离散程度参数;若所述离散程度参数满足预设的异常条件,则认定所述马达振荡异常,并调整所述驱动信号。
技术研发人员:沈古月,柳慧芬,雍径舟
受保护的技术使用者:武汉市聚芯微电子有限责任公司
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!