基于深度神经网络的车床热误差自适应补偿方法及系统与流程
本发明属于数控机床控制,具体涉及基于深度神经网络的车床热误差自适应补偿方法,还涉及基于深度神经网络的车床热误差自适应补偿系统。
背景技术:
1、车床在实际加工过程中,各运动轴的定位误差受多种因素影响,如环境温度、丝杆与螺母的温度、加工过程中的主轴转速、进给速度以及工序时间等。传统的热误差补偿方法在面对复杂、多维度且非线性的误差源时往往力不从心。为了解决这些问题,采用深度神经网络(dnn)来建立热误差模型,并通过自适应学习功能,根据用户反馈的数据动态更新模型,使其能够更好地适应不同季节、不同时间段以及多种加工条件下的误差补偿需求,以提高车床的加工精度和稳定性。
2、中国专利(申请号:201810936815.9,公开号:cn 108803486 b,公开日:2021.02.02)公开了基于并联深度学习网络的数控机床热误差预测与补偿方法,首先,在数控机床上选取热源测量点,检测热源测量点的温度值和对应时间点的主轴热误差值,作为样本数据;建立基于并联深度信念网络的深度学习热误差预测模型,并训练;将预测的热误差值作为补偿平移量,实现热误差实时补偿,该方法具有能够准确表征大数据情况下监测温度信号与热误差之间复杂的映射关系,有利于提高热误差预测与补偿精度等优点。虽然该模型中的三个深度信念网络分别用于预测主轴在x、y、z轴方向上的热误差值,但主轴在不同轴方向上的热误差可能存在一定的相关性。该模型不能充分利用这种相关性,降低预测准确性。另一方面,三个网络之间的协同性过强,会导致过拟合或者对某一方向的热误差过于敏感,影响模型的稳定性。
3、中国专利(申请号:202010391543.6,公开号:cn 111596612 a,公开日:2020.08.28)公开了基于工件尺寸数据的数控机床热误差补偿方法及系统,通过基于加工工序的过程能力指数分析,从切削工作实测温度数据中解析得到关键温度点;通过多层感知器神经网络构建基于工件尺寸检测数据的数控机床热误差模型,进而得到运动补偿量,并通过数控机床的外部坐标零点偏置功能实现热误差补偿。该方法考虑了由加工过程引起的机床及工件热变形,对实际加工条件下的机床热误差进行有效补偿。通过数控机床的外部坐标零点偏置功能实现热误差补偿,这种方式依赖于数控机床控制系统的稳定性和可靠性。如果数控机床的控制系统出现故障或者受到干扰,可能会导致坐标零点偏置不准确,影响热误差补偿的效果。
技术实现思路
1、本发明的目的是提供基于深度神经网络的车床热误差自适应补偿方法,通过引入自适应学习机制,优化模型的精度,从而提高各运动轴的定位精度。
2、本发明的目的是提供基于深度神经网络的车床热误差自适应补偿系统。
3、本发明所采用的技术方案是,基于深度神经网络的车床热误差自适应补偿方法,具体按照以下步骤实施:
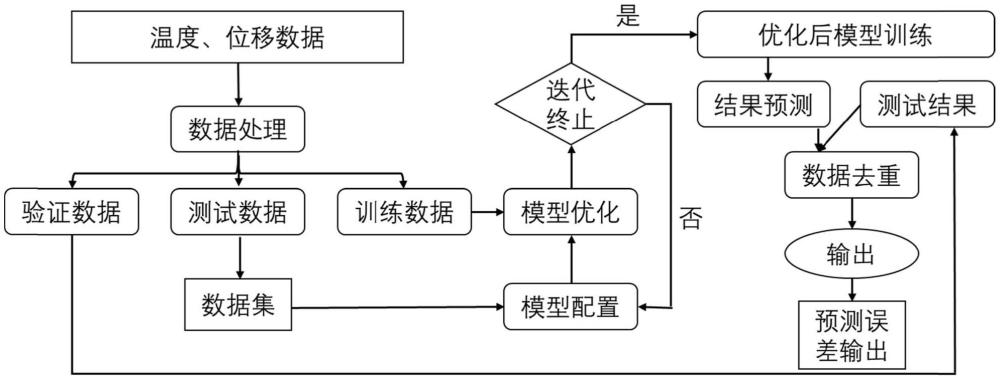
4、步骤1,数据采集与预处理;在车床的运行过程中,实时采集环境温度tenv、丝杆温度tball、螺母温度tnut、主轴转速s、进给速度f、工序时间t数据以及对应的各运动轴定位误差òz;对采集的数据进行去噪和归一化处理,并将数据分为训练集和测试集;
5、步骤2,构建深度神经网络模型;
6、步骤3,利用训练集数据训练深度神经网络模型,并通过自适应学习机制,实时更新深度神经网络模型的参数,得到工况最优的深度神经网络模型;
7、步骤4,利用工况最优的深度神经网络模型预测各运动轴热误差,并将补偿值反馈至各运动轴控制系统中,实现实时补偿。
8、本发明的特点还在于,
9、步骤2中,深度神经网络模型采用多层感知器的结构,由输入层、多个隐藏层和输出层组成;采用3-5个隐藏层,每层包含50-100个神经元;每个隐藏层的输出通过非线性激活函数进行变换。
10、深度神经网络模型的输入特征向量如式(2)所示,输出为各运动轴的定位误差预测值,如式(3)所示:
11、x=[tenv ,tball ,tnut ,s,f,t] (2);
12、
13、其中,f(g)表示深度神经网络模型,w和b分别表示模型的权重矩阵和偏置向量;
14、深度神经网络模型通过均方误差(mse)作为损失函数,损失函数的计算公式如式(4)所示:
15、
16、其中,是第i个样本的真实各运动轴定位误差,是模型预测的误差,n是样本数量。
17、步骤3中,具体为:
18、步骤3.1,根据加工后的工件测量数据,获取实际定位误差并存储;
19、步骤3.2,将实际定位误差与模型预测的定位误差进行对比,计算误差差值;
20、步骤3.3,根据误差差值,通过adam优化算法对深度神经网络的权重和偏置进行更新,使模型逐步适应当前工况;当模型的损失函数值在迭代中不再显著下降时,模型已经收敛,停止训练。
21、adam优化算法的更新公式为:
22、(1)计算梯度的指数加权移动平均值,如式(5)所示:
23、mt=β1mt-1+(1-β1)gt (5);
24、其中,mt为梯度的一阶动量估计,β1为一阶动量的指数衰减率,gt为当前的梯度;
25、(2)计算梯度平方的指数加权移动平均值,如式(6)所示:
26、
27、其中,vt为梯度的二阶动量估计,β2为二阶动量的指数衰减率;
28、(3)计算偏差修正,如式(7)、式(8)所示:
29、
30、(4)计算参数的更新量,如式(9)所示:
31、
32、其中,为更新后的模型参数,η为学习率,ε为常数。
33、本发明所采用的另一技术方案是,基于深度神经网络的车床热误差自适应补偿系统,包括:
34、数据采集模块,用于实时采集环境温度、丝杆温度、螺母温度、主轴转速、进给速度、工序时间;
35、深度神经网络模型训练模块,基于采集的数据预测各运动轴的定位误差,并通过自适应学习机制根据反馈数据进行在线更新;
36、补偿控制模块,将深度神经网络模型预测的误差补偿值反馈至数控系统,用于实时调整各运动轴的定位。
37、本发明的有益效果是:本发明的方法,通过深度神经网络模型的自适应学习机制,能够动态响应不同季节、不同时间段及加工条件下的各运动轴热误差变化,显著提高了车床的加工精度。与传统模型相比,该方法能更好地适应复杂、多变的加工环境,并能随着时间的推移不断优化,提高了产品的一致性和质量。
技术特征:
1.基于深度神经网络的车床热误差自适应补偿方法,其特征在于,具体按照以下步骤实施:
2.如权利要求1所述的基于深度神经网络的车床热误差自适应补偿方法,其特征在于,所述步骤2中,深度神经网络模型采用多层感知器的结构,由输入层、多个隐藏层和输出层组成;采用3-5个隐藏层,每层包含50-100个神经元;每个隐藏层的输出通过非线性激活函数进行变换。
3.如权利要求2所述的基于深度神经网络的车床热误差自适应补偿方法,其特征在于,深度神经网络模型的输入特征向量如式(2)所示,输出为各运动轴的定位误差预测值,如式(3)所示:
4.如权利要求1所述的基于深度神经网络的车床热误差自适应补偿方法,其特征在于,所述步骤3中,具体为:
5.如权利要求4所述的基于深度神经网络的车床热误差自适应补偿方法,其特征在于,所述adam优化算法的更新公式为:
6.实现如权利要求1-5任一项所述的基于深度神经网络的车床热误差自适应补偿方法的系统,其特征在于,包括:
技术总结
本发明公开了基于深度神经网络的车床热误差自适应补偿方法,具体为:对数据进行去噪和归一化处理,并将数据分为训练集和测试集;利用训练集数据训练深度神经网络模型,并通过自适应学习机制,实时更新深度神经网络模型的参数,得到工况最优的深度神经网络模型;利用模型预测各运动轴热误差,并将补偿值反馈至各运动轴控制系统中,实现实时补偿。本发明还公开了基于深度神经网络的车床热误差自适应补偿系统,包括:数据采集模块、深度神经网络模型训练模块和补偿控制模块。本发明的方法,通过深度神经网络模型的自适应学习机制,能够动态响应不同季节、不同时间段及加工条件下的各运动轴热误差变化,显著提高了车床的加工精度。
技术研发人员:吴文武,赵万华,刘辰,位文明,郭正
受保护的技术使用者:陕西高端机床创新研究有限公司
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!