一种用于对目标对象进行协同追踪的方法以及装置
本申请涉及目标追踪,具体涉及一种用于对目标对象进行协同追踪的方法、一种用于对目标对象进行协同追踪的装置、一种协同控制设备以及一种计算机可读存储介质。
背景技术:
1、空中机器人(例如,无人机)和地面机器人作为自主移动载体,其广泛应用于基于视觉的目标检测场景中,例如,空中机器人和地面机器人均可分别应用于救援、军事行动、交通管理和环境监测等领域的目标探测、目标跟踪、目标监视等检测场景中。
2、空中机器人和地面机器人在目标跟踪场景中各具优势,例如,空中机器人具有快速机动能力和广阔视野,可以在大范围区域中实现对目标的定位和探测,并且能够避开地面障碍物的限制,使其能够在复杂地形和障碍物密集的环境中操作;而地面机器人的续航和承载能力较强,并且作为地面作业设备,其可以在地面上提供更细致和更稳定的追踪、搜寻和执行能力。然而,空中机器人由于续航能力较弱,受天气和环境的影响较大,其在长时间、长距离检测任务和恶劣环境下的性能可能受到影响;地面机器人易受地形限制,且移动速度较慢,并且,搭载在地面机器人上的传感器由于其高度有限,使得地面机器人的视野和监测范围较为受限。
3、因此,如何在地形复杂、环境恶劣、且长时间、长距离的跟踪场景中对目标对象进行精准高效追踪,是需要解决的问题。
技术实现思路
1、本发明提供一种用于对目标对象进行协同追踪的方法、装置、协同控制设备以及计算机可读存储介质,以解决现有的仅使用空中机器人或地面机器人在地形复杂、环境恶劣、且长时间、长距离的跟踪场景中无法对目标对象进行精准高效追踪的问题。
2、为了解决或部分解决上述技术问题,根据本发明的一方面,提供一种用于对目标对象进行协同追踪的方法,该方法包括:
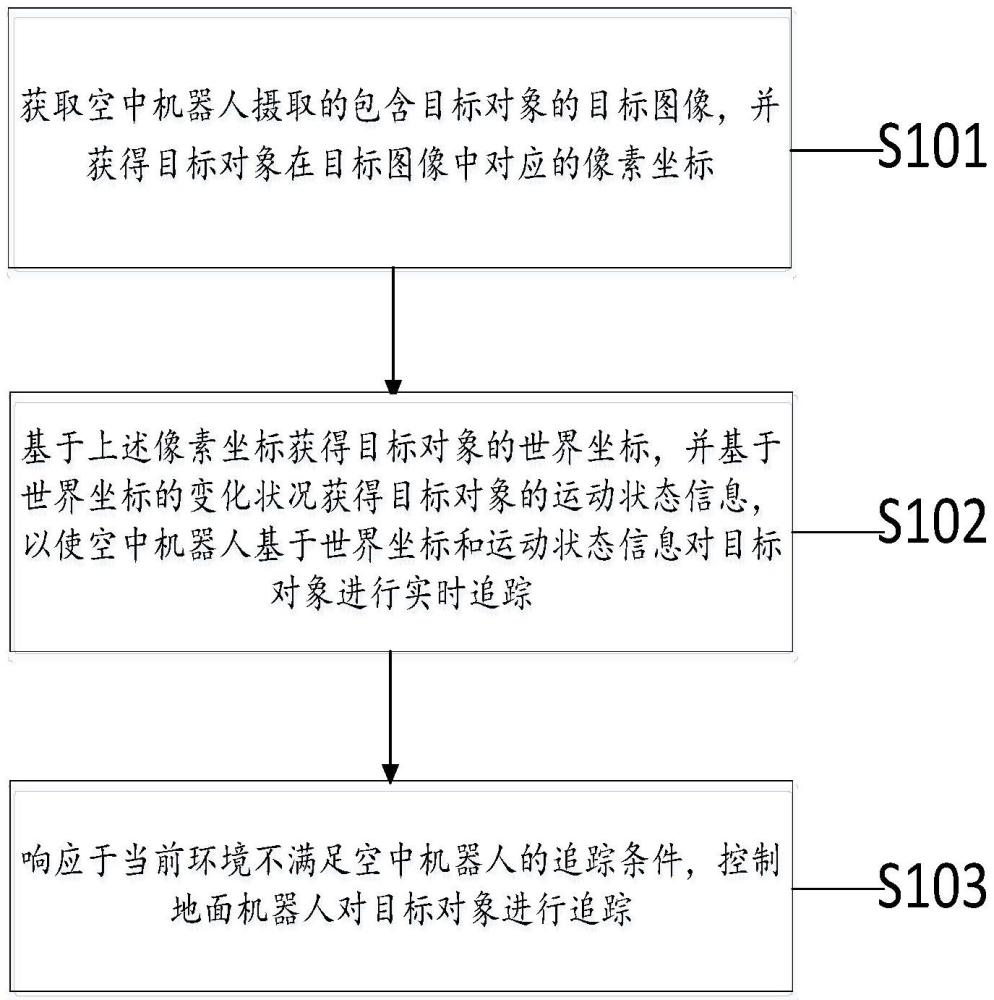
3、获取空中机器人摄取的包含目标对象的目标图像,并获得所述目标对象在所述目标图像中对应的像素坐标;
4、基于所述像素坐标获得所述目标对象的世界坐标,并基于所述世界坐标的变化状况获得所述目标对象的运动状态信息,以使所述空中机器人基于所述世界坐标和所述运动状态信息对所述目标对象进行实时追踪;
5、响应于当前环境不满足所述空中机器人的追踪条件,控制地面机器人对所述目标对象进行追踪。
6、在一种实施方式中,所述控制地面机器人对所述目标对象进行追踪,包括;
7、基于所述目标对象在当前时间点对应的世界坐标和运动状态信息,预估所述目标对象在预定时间段内对应的目标世界坐标,或者,实时获取来自所述空中机器人的所述目标对象的目标世界坐标;
8、控制多个地面机器人对所述目标世界坐标进行合围检测,以对所述目标对象进行追踪。
9、在一种实施方式中,所述控制多个地面机器人对所述目标世界坐标进行合围检测,包括:
10、基于各所述地面机器人相对于所述目标世界坐标的方位和距离、各所述地面机器人针对所述目标世界坐标的期望合围速度、以及预设的合围移动策略,控制各所述地面机器人对所述目标世界坐标进行合围检测。
11、在一种实施方式中,所述控制地面机器人对所述目标对象进行追踪,包括:
12、基于所述目标对象在当前时间点对应的所述世界坐标和所述运动状态信息,预估所述目标对象在预定时间段内对应的目标区域;
13、控制多个地面机器人对所述目标区域进行合围检测,以对所述目标对象进行追踪。
14、在一种实施方式中,所述控制多个地面机器人对所述目标区域进行合围检测,包括:
15、基于各所述地面机器人相对于所述目标区域的中心点的方位和距离、各所述地面机器人针对所述目标区域的中心点的期望合围速度、以及预设的合围移动策略,控制各所述地面机器人对所述目标区域的中心点进行合围检测;
16、在各所述地面机器人对所述目标区域的中心点进行合围检测的过程中,响应于任一所述地面机器人检测到所述目标对象,获得所述目标对象的目标位置,并控制各所述地面机器人将合围检测的目标调整为所述目标对象。
17、在一种实施方式中,所述运动状态信息包括如下中的至少一种:
18、目标对象的移动方向;
19、目标对象的速度;
20、目标对象的加速度。
21、在一种实施方式中,基于所述像素坐标获得所述目标对象的世界坐标,包括:基于仿射变换和透视投影原理将所述像素坐标转换为相机坐标;基于刚体变换和相似变换原理将所述相机系坐标转换为世界坐标。
22、根据本发明的另一方面,提供一种用于对目标对象进行协同追踪的装置,所述装置包括:
23、像素坐标获得单元,用于获取空中机器人摄取的包含目标对象的目标图像,并获得所述目标对象在所述目标图像中对应的像素坐标;
24、坐标及运动状态确定单元,用于基于所述像素坐标获得所述目标对象的世界坐标,并基于所述世界坐标的变化状况获得所述目标对象的运动状态信息,以使所述空中机器人基于所述世界坐标和所述运动状态信息对所述目标对象进行实时追踪;
25、控制追踪单元,用于在当前环境不满足所述空中机器人的追踪条件时,控制地面机器人对所述目标对象进行追踪。
26、根据本发明的另一方面,提供一种协同控制设备,该协同控制设备包括处理器和存储器;其中,所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述处理器执行以实现如上所述的方法。
27、根据本发明的另一方面,还提供一种计算机可读存储介质,其上存储有一条或多条计算机指令,该指令被处理器执行以实现上述用于对目标对象进行协同追踪的方法。
28、与现有技术相比,本发明具有以下优点:
29、本发明提供的用于对目标对象进行协同追踪的方法包括:获取空中机器人摄取的包含目标对象的目标图像,并获得目标对象在目标图像中对应的像素坐标;基于像素坐标获得目标对象的世界坐标,并基于世界坐标的变化状况获得目标对象的运动状态信息,以使空中机器人基于世界坐标和运动状态信息对目标对象进行实时追踪;响应于当前环境不满足空中机器人的追踪条件,控制地面机器人对目标对象进行追踪。该方法可在当前环境满足空中机器人的追踪条件时、基于空中机器人的快速机动能力和广阔视野等优势对目标对象进行实时追踪,在当前环境不满足空中机器人的追踪条件时、基于地面机器人的续航能力和更细致稳定的追踪、搜寻和执行能力对目标对象进行追踪,从而通过空中机器人和地面机器人共同实现在地形复杂、环境恶劣、且长时间、长距离的跟踪场景中对目标对象进行精准高效追踪。
技术特征:
1.一种用于对目标对象进行协同追踪的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述控制地面机器人对所述目标对象进行追踪,包括;
3.根据权利要求2所述的方法,其特征在于,所述控制多个地面机器人对所述目标世界坐标进行合围检测,包括:
4.根据权利要求1所述的方法,其特征在于,所述控制地面机器人对所述目标对象进行追踪,包括:
5.根据权利要求4所述的方法,其特征在于,所述控制多个地面机器人对所述目标区域进行合围检测,包括:
6.根据权利要求1、2、4中任一项所述的方法,其特征在于,所述运动状态信息包括如下中的至少一种:
7.根据权利要求1所述的方法,其特征在于,基于所述像素坐标获得所述目标对象的世界坐标,包括:
8.一种用于对目标对象进行协同追踪的装置,其特征在于,所述装置包括:
9.一种协同控制设备,其特征在于,包括处理器和存储器;其中,
10.一种计算机可读存储介质,其上存储有一条或多条计算机指令,其特征在于,该指令被处理器执行以实现如权利要求1-7中任一项所述的方法。
技术总结
本申请公开了一种用于对目标对象进行协同追踪的方法以及装置,该方法包括:获取空中机器人摄取的包含目标对象的目标图像,并获得目标对象在目标图像中对应的像素坐标;基于像素坐标获得目标对象的世界坐标,并基于世界坐标的变化状况获得目标对象的运动状态信息,以使空中机器人基于世界坐标和运动状态信息对目标对象进行实时追踪;响应于当前环境不满足空中机器人的追踪条件,控制地面机器人对目标对象进行追踪。该方法可通过空中机器人和地面机器人共同实现在地形复杂、环境恶劣、且长时间、长距离的跟踪场景中对目标对象进行精准高效追踪。
技术研发人员:王晶,吕皓月,靳雅宁,周萌,王昶,王力
受保护的技术使用者:北方工业大学
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!