一种用于磁悬浮列车的悬浮控制算法的试验台及试验方法与流程
本申请涉及磁悬浮列车,具体涉及一种用于磁悬浮列车的悬浮控制算法的试验台及试验方法
背景技术:
1、悬浮控制算法是磁悬浮列车的关键技术,关系着磁悬浮列车的运行安全。设计和优化悬浮控制算法时,均需要进行大量台架试验,目前,用于磁悬浮列车的悬浮控制算法的试验台无法模拟磁悬浮列车过轨缝的情况,导致设计出悬浮控制算法实际应用时存在偏差。
技术实现思路
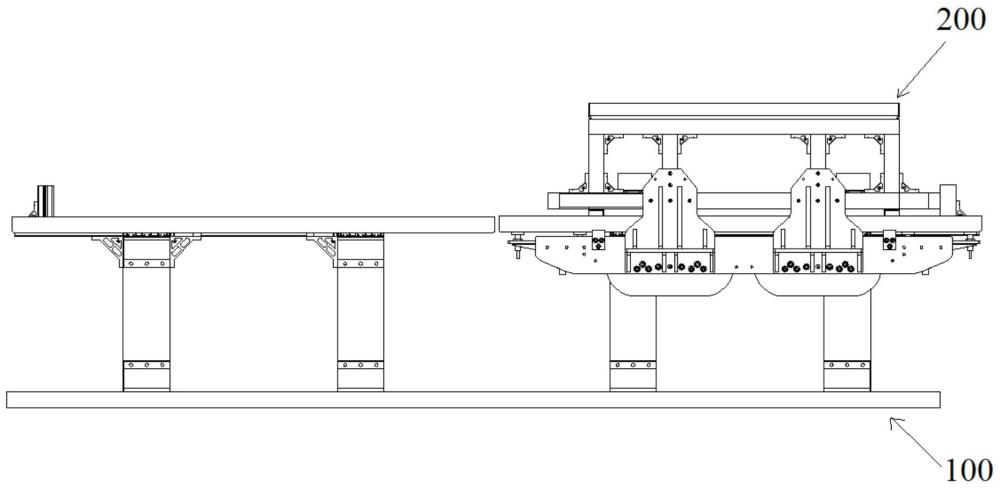
1、本申请提供一种用于磁悬浮列车的悬浮控制算法的试验台,所述试验台包括轨道模块和悬浮架模块,所述轨道模块包括感应板和至少两段轨道,相邻两段所述轨道之间形成轨缝,所述悬浮架模块包括直线电机、控制单元、电磁铁单元、一个或多个传感单元,所述直线电机能够和所述感应板相互感应驱动所述悬浮架模块沿所述轨道移动,所述电磁铁单元的一处或多处设置电磁线圈,以形成一个或多个悬浮控制点,每个所述悬浮控制点对应一个所述传感单元,每个所述传感单元包括沿所述轨道的长度方向依次排列的两个间隙传感器,所述控制单元与每个所述传感单元通信连接,所述控制单元还与每个所述悬浮控制点的所述电磁线圈的电源通信连接,所述控制单元能够分别根据每个所述传感单元的检测数据控制对应的所述悬浮控制点的电磁线圈的电流大小。
2、用于磁悬浮列车的悬浮控制算法的试验台的一种实施方式,所述轨道模块包括支座,所述支座位于所述轨道下方,所述支座包括固定部和滑动部,每段所述轨道各自由至少一个所述滑动部支撑,所述滑动部能够相对所述固定部上下移动和沿平行于所述轨道的方向移动,以调节所述轨缝的大小和不同段所述轨道的高度差。
3、用于磁悬浮列车的悬浮控制算法的试验台的一种实施方式,所述悬浮架模块包括悬浮架本体和托臂,所述电磁铁单元通过所述托臂连接在所述悬浮架本体下方,所述悬浮架本体包括上层、下层和连在所述上层和所述下层之间的支柱,所述控制单元设置在所述悬浮架本体的所述上层和所述下层之间的空间中,所述直线电机设置在所述下层下方。
4、用于磁悬浮列车的悬浮控制算法的试验台的一种实施方式,所述上层上设置有托盘;和/或,所述下层下设置有垫块,所述下层通过所述垫块支撑在所述轨道上。
5、用于磁悬浮列车的悬浮控制算法的试验台的一种实施方式,所述传感单元还包括温度传感器,所述温度传感器检测对应的所述悬浮控制点的所述电磁线圈的温度;和/或,所述传感单元还包括加速度传感器,所述加速度传感器检测所述悬浮架模块的垂向加速度。
6、用于磁悬浮列车的悬浮控制算法的试验台的一种实施方式,所述控制单元包括半实物仿真机、接口处理板和功率放大器,所述半实物仿真机与上位机通信连接,所述半实物仿真机能够加载从所述上位机传输来的待试验的悬浮控制算法,所述半实物仿真机通过所述接口处理板与所述功率放大器以及所述传感单元通信连接,所述功率放大器与每个所述悬浮控制点的所述电磁线圈的电源通信连接,所述接口处理板能够将所述传感单元传输来的检测数据传输给所述半实物仿真机,所述半实物仿真机能够基于所述悬浮控制算法并依据所述传感单元的检测数据计算并输出电流控制信号,所述接口处理板能够将所述半实物仿真机的所述电流控制信号传输给所述功率放大器,所述功率放大器能够将所述电流控制信号进行功率放大后传输给所述电磁线圈的电源。
7、本申请还提供一种用于磁悬浮列车的悬浮控制算法的试验方法,基于上述任一项所述的用于磁悬浮列车的悬浮控制算法的试验台实现,所述试验方法包括以下步骤:
8、开启所述直线电机进行动态悬浮试验;
9、动态悬浮试验时,将待试验的悬浮控制算法加载至所述控制单元,所述控制单元接收每个所述传感单元的检测数据,所述检测数据包括所述间隙传感器检测的间隙,所述控制单元对所述间隙传感器检测的间隙进行判定;
10、动态悬浮试验时,所述判定包括判断所述间隙传感器检测的间隙是否有效,还包括判断所述间隙传感器是否处于过轨缝阶段,当判断每个所述传感单元的所述间隙传感器检测的间隙均有效时,所述控制单元基于所述悬浮控制算法并依据所述传感单元的所述检测数据计算并输出电流控制信号,来控制对应的所述悬浮控制点的电磁线圈的电流大小,当判断同一个所述传感单元的一个所述间隙传感器处于过轨缝阶段时,以另一个所述间隙传感器检测的间隙作为所述电流控制信号的计算依据,当判断同一个所述传感单元的两个所述间隙传感器均未处于过轨缝阶段时,以两个所述间隙传感器检测的间隙的平均值作为所述电流控制信号的计算依据。
11、用于磁悬浮列车的悬浮控制算法的试验方法的一种实施方式,当所述间隙传感器检测的间隙先增大超过预设有效间隙范围的上限值再减小到预设有效间隙范围内时,判定所述间隙传感器处于过轨缝阶段。
12、用于磁悬浮列车的悬浮控制算法的试验方法的一种实施方式,所述试验方法包括以下步骤:
13、关闭所述直线电机进行静态悬浮试验;
14、静态悬浮试验时,将待试验的悬浮控制算法加载至所述控制单元,所述控制单元接收每个所述传感单元的检测数据,所述检测数据包括所述间隙传感器检测的间隙,所述控制单元对所述间隙传感器检测的间隙进行判定;
15、静态悬浮试验时,所述判定包括判断所述间隙传感器检测的间隙是否有效,当判断每个所述传感单元的至少一个所述间隙传感器检测的间隙有效时,所述控制单元基于所述悬浮控制算法并依据所述传感单元的所述检测数据计算并输出电流控制信号,来控制对应的所述悬浮控制点的电磁线圈的电流大小,当判断同一个所述传感单元的一个所述间隙传感器检测的间隙有效、另一个所述间隙传感器检测的间隙无效时,以有效的所述间隙传感器检测的间隙作为所述电流控制信号的计算依据,当判断同一个所述传感单元的两个所述间隙传感器检测的间隙均有效时,以两个所述间隙传感器检测的间隙的平均值作为所述电流控制信号的计算依据。
16、用于磁悬浮列车的悬浮控制算法的试验方法的一种实施方式,当预设时间内所述间隙传感器检测的间隙一直在预设有效间隙范围外时,判断所述间隙传感器检测的间隙无效。
17、本申请提供的试验台和试验方法能够模拟磁悬浮列车过轨缝的情况,期间,每个传感单元的两个间隙传感器不会同时经过轨缝,因此每个传感单元总有一个间隙传感器检测的间隙是相对稳定的,使得控制单元总能计算出一个相对稳定的电流控制信号,避免在模拟磁悬浮列车过轨缝情况时控制单元输出的电流控制信号不稳导致悬浮架模块无法经过轨缝致使模拟失败或失真的问题。
技术特征:
1.一种用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述试验台包括轨道模块和悬浮架模块,所述轨道模块包括感应板和至少两段轨道,相邻两段所述轨道之间形成轨缝,所述悬浮架模块包括直线电机、控制单元、电磁铁单元、一个或多个传感单元,所述直线电机能够和所述感应板相互感应驱动所述悬浮架模块沿所述轨道移动,所述电磁铁单元的一处或多处设置电磁线圈,以形成一个或多个悬浮控制点,每个所述悬浮控制点对应一个所述传感单元,每个所述传感单元包括沿所述轨道的长度方向依次排列的两个间隙传感器,所述控制单元与每个所述传感单元通信连接,所述控制单元还与每个所述悬浮控制点的所述电磁线圈的电源通信连接,所述控制单元能够分别根据每个所述传感单元的检测数据控制对应的所述悬浮控制点的电磁线圈的电流大小。
2.根据权利要求1所述的用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述轨道模块包括支座,所述支座位于所述轨道下方,所述支座包括固定部和滑动部,每段所述轨道各自由至少一个所述滑动部支撑,所述滑动部能够相对所述固定部上下移动和沿平行于所述轨道的方向移动,以调节所述轨缝的大小和不同段所述轨道的高度差。
3.根据权利要求1所述的用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述悬浮架模块包括悬浮架本体和托臂,所述电磁铁单元通过所述托臂连接在所述悬浮架本体下方,所述悬浮架本体包括上层、下层和连在所述上层和所述下层之间的支柱,所述控制单元设置在所述悬浮架本体的所述上层和所述下层之间的空间中,所述直线电机设置在所述下层下方。
4.根据权利要求3所述的用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述上层上设置有托盘;和/或,所述下层下设置有垫块,所述下层通过所述垫块支撑在所述轨道上。
5.根据权利要求1所述的用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述传感单元还包括温度传感器,所述温度传感器检测对应的所述悬浮控制点的所述电磁线圈的温度;和/或,所述传感单元还包括加速度传感器,所述加速度传感器检测所述悬浮架模块的垂向加速度。
6.根据权利要求1-5任一项所述的用于磁悬浮列车的悬浮控制算法的试验台,其特征在于,所述控制单元包括半实物仿真机、接口处理板和功率放大器,所述半实物仿真机与上位机通信连接,所述半实物仿真机能够加载从所述上位机传输来的待试验的悬浮控制算法,所述半实物仿真机通过所述接口处理板与所述功率放大器以及所述传感单元通信连接,所述功率放大器与每个所述悬浮控制点的所述电磁线圈的电源通信连接,所述接口处理板能够将所述传感单元传输来的检测数据传输给所述半实物仿真机,所述半实物仿真机能够基于所述悬浮控制算法并依据所述传感单元的检测数据计算并输出电流控制信号,所述接口处理板能够将所述半实物仿真机的所述电流控制信号传输给所述功率放大器,所述功率放大器能够将所述电流控制信号进行功率放大后传输给所述电磁线圈的电源。
7.一种用于磁悬浮列车的悬浮控制算法的试验方法,基于权利要求1-6任一项所述的用于磁悬浮列车的悬浮控制算法的试验台实现,其特征在于,所述试验方法包括以下步骤:
8.根据权利要求7所述的用于磁悬浮列车的悬浮控制算法的试验方法,其特征在于,当所述间隙传感器检测的间隙先增大超过预设有效间隙范围的上限值再减小到预设有效间隙范围内时,判定所述间隙传感器处于过轨缝阶段。
9.根据权利要求7所述的用于磁悬浮列车的悬浮控制算法的试验方法,其特征在于,所述试验方法包括以下步骤:
10.根据权利要求7-9任一项所述的用于磁悬浮列车的悬浮控制算法的试验方法,其特征在于,当预设时间内所述间隙传感器检测的间隙一直在预设有效间隙范围外时,判断所述间隙传感器检测的间隙无效。
技术总结
本申请提供一种用于磁悬浮列车的悬浮控制算法的试验台及试验方法,试验台包括轨道模块和悬浮架模块,轨道模块包括感应板和至少两段轨道,相邻两段轨道之间形成轨缝,悬浮架模块包括直线电机、控制单元、电磁铁单元、一个或多个传感单元,直线电机能够和感应板相互感应驱动悬浮架模块沿轨道移动,电磁铁单元的一处或多处设置电磁线圈,形成一个或多个悬浮控制点,每个悬浮控制点对应一个传感单元,每个传感单元包括沿轨道的长度方向依次排列的两个间隙传感器,控制单元能够分别根据每个传感单元的检测数据控制对应的悬浮控制点的电磁线圈的电流大小。本申请能够模拟磁悬浮列车过轨缝的情况。
技术研发人员:荆博,刘帅,韩羽菲,王若呈,张宇喆,张佳欣
受保护的技术使用者:中车科技创新(北京)有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!