一种基于子矩阵选择的集群编队轨迹规划方法
本发明属于集群编队轨迹规划,尤其涉及一种基于子矩阵选择的集群编队轨迹规划方法。
背景技术:
1、集群编队飞行在货物搬运,编队表演等多个领域都有应用。为了缓解集中式集群编队计算复杂度高、编队容错能力差的弊端,已出现了很多分布式集群编队研究与发明,但是目前大多使用全连接图描述集群关系,即无人机需考虑其他所有无人机的轨迹进行协同,导致编队规划复杂度随着集群规模的增加呈指数级增长,无法实现实时分布式的大规模、高性能编队规划。
2、目前存在一些连接图稀疏化的方法,例如单个智能体只与邻近的一些智能体进行协同,但是这种稀疏连接损失了整个编队形状过多的特征,在有障碍物的环境中编队协同效果较差。
3、对于大规模的编队系统,传统方法采用集中式的策略进行协同,当时这种方法难以满足密集障碍物环境下的编队协同,而且,这种集中计算方法鲁棒性差,极度依赖于中央计算器。
4、分布式集群编队系统中,每个智能体接收其他智能体位置信息,自主计算自己的轨迹,整个系统鲁棒性高,但是大多研究中单个智能体冗余地考虑全部其他智能体地约束,极大地降低了轨迹优化地效率。
5、现有研究仅考虑邻近智能体位置信息地算法研究,但是这种稀疏化策略所获得的信息太过局部,过度损失了整个集群的全局特征,导致密集障碍物环境下编队保持效果差。
技术实现思路
1、针对现有技术存在的问题,本申请实施例的目的是提供一种基于子矩阵选择的集群编队轨迹规划方法,改进目前的分布式全连接的编队算法,旨在通过选取全连接拉普拉斯矩阵的子矩阵来减少连接约束,提升优化效率,保证编队性能的情况下,实现更大规模的分布式集群编队。
2、根据本申请实施例的第一方面,提供一种基于子矩阵选择的集群编队轨迹规划方法,包括:
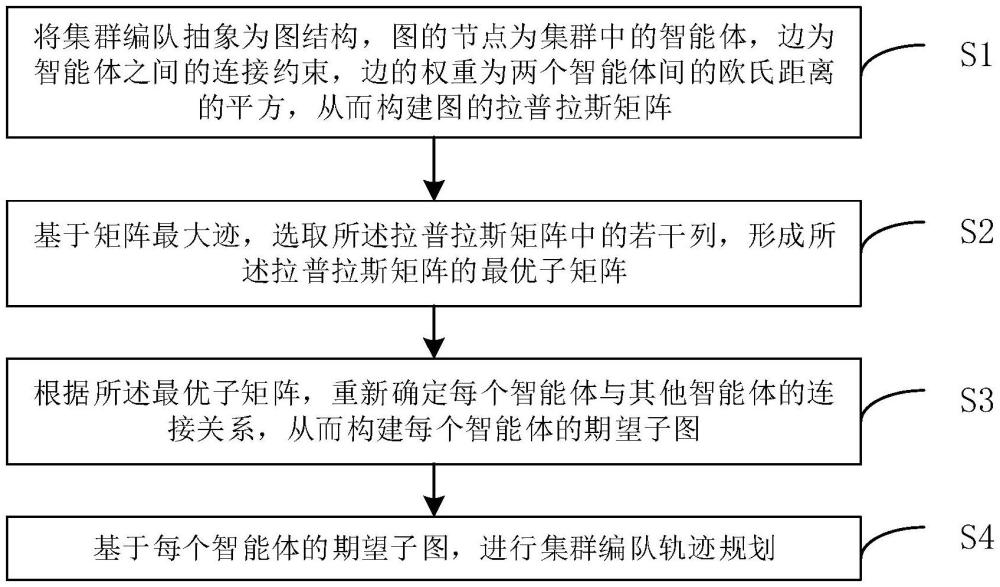
3、将集群编队抽象为图结构,图的节点为集群中的智能体,边为智能体之间的连接约束,边的权重为两个智能体间的欧氏距离的平方,从而构建图的拉普拉斯矩阵;
4、基于矩阵最大迹,选取所述拉普拉斯矩阵中的若干列,形成所述拉普拉斯矩阵的最优子矩阵;
5、根据所述最优子矩阵,重新确定每个智能体与其他智能体的连接关系,从而构建每个智能体的期望子图;
6、基于每个智能体的期望子图,进行集群编队轨迹规划。
7、进一步地,对于有n个智能体的集群编队,形成的图为是节点集合,图的边为第i个节点具有位置向量其中边的权重wij=||pi-pj||2,||.||是欧式距离度量;
8、图的拉普拉斯矩阵l=d–a,其中d为图的度矩阵,a为图的邻接矩阵:
9、
10、进一步地,基于矩阵最大迹,选取所述拉普拉斯矩阵中的若干列,形成所述拉普拉斯矩阵的最优子矩阵,包括:
11、确定子矩阵选取的列数n为拉普拉斯矩阵的列数;
12、构造第一目标问题其中表示拉普拉斯矩阵l中选取特定的m列形成的子矩阵即所述最优子矩阵,rl为从l中选取出来的列的标号的集合;
13、将矩阵最大迹作为选取最优子矩阵的度量标准,从而将所述第一目标问题转化为第二目标问题其中fs为矩阵的迹;
14、利用遗传算法求解所述第二目标问题,得到所述拉普拉斯矩阵中被选取列的索引序号集合,即得到所述最优子矩阵。
15、进一步地,利用遗传算法求解所述第二目标问题,得到所述拉普拉斯矩阵中被选取列的索引序号集合,即得到所述最优子矩阵,具体为:
16、设置优化变量为一个n维向量:
17、x[i]=0or 1
18、其中x[i]表示被选取矩阵中第i列是否被选中,优化变量即为x[i]的集合;
19、设置选取列数的约束条件
20、
21、基于上述设置,利用遗传算法求解所述第二目标问题,得到所述拉普拉斯矩阵中每一列是否被选取,从而得到所述最优子矩阵。
22、进一步地,根据所述最优子矩阵,重新确定每个智能体与其他智能体的连接关系,从而构建每个智能体的期望子图,包括:
23、根据所述最优子矩阵重新确定每个智能体与其他智能体的连接关系:
24、
25、对于第i个智能体,根据智能体之间的连接关系,得到期望子图为:
26、
27、其中,a[i]表示第i个智能体的期望子图的邻接矩阵,表示拉普拉斯矩阵中第α行,第β列的元素,d[i]表示第i个智能体的期望子图的度矩阵,m是所述最优子矩阵的列数。
28、根据本申请实施例的第二方面,提供一种基于子矩阵选择的集群编队轨迹规划装置,包括:
29、图构造模块,用于将集群编队抽象为图结构,图的节点为集群中的智能体,边为智能体之间的连接约束,边的权重为两个智能体间的欧氏距离的平方,从而构建图的拉普拉斯矩阵;
30、子矩阵选择模块,用于基于矩阵最大迹,选取所述拉普拉斯矩阵中的若干列,形成所述拉普拉斯矩阵的最优子矩阵;
31、期望子图构建模块,用于根据所述最优子矩阵,重新确定每个智能体与其他智能体的连接关系,从而构建每个智能体的期望子图;
32、轨迹规划模块,用于基于每个智能体的期望子图,进行集群编队轨迹规划。
33、根据本申请实施例的第三方面,提供一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现如第一方面所述的方法。
34、根据本申请实施例的第四方面,提供一种电子设备,包括:
35、一个或多个处理器;
36、存储器,用于存储一个或多个程序;
37、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的方法。
38、根据本申请实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如第一方面所述方法的步骤。
39、本申请的实施例提供的技术方案可以包括以下有益效果:
40、现有的分布式编队算法大多采用全连接图,单个智能体考虑全部其他智能体的位置约束,在轨迹优化的时候带来了冗余的约束,随着集群规模增加,优化效率急剧下降,限制了规模的提高。而一些简单的减少连接的方法,如最邻近连接方法,损失了过多的全局信息导致编队性能不好。
41、本发明采用子矩阵选择的方法进行连接稀疏化,大量提升效率的同时又准确把握了全局的信息,很好地平衡了轨迹优化效率和编队性能,相比于全连接图,稀疏图下集群轨迹规划效率呈倍数级提升,且随着集群规模增加,效率优势更加明显。适合复杂环境下,更大规模地集群编队避障导航。
42、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种基于子矩阵选择的集群编队轨迹规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,对于有n个智能体的集群编队,形成的图为是节点集合,图的边为第i个节点具有位置向量其中边的权重wij=||pi-pj||2,‖.‖是欧式距离度量;
3.根据权利要求1所述的方法,其特征在于,基于矩阵最大迹,选取所述拉普拉斯矩阵中的若干列,形成所述拉普拉斯矩阵的最优子矩阵,包括:
4.根据权利要求3所述的方法,其特征在于,利用遗传算法求解所述第二目标问题,得到所述拉普拉斯矩阵中被选取列的索引序号集合,即得到所述最优子矩阵,具体为:
5.根据权利要求1所述的方法,其特征在于,根据所述最优子矩阵,重新确定每个智能体与其他智能体的连接关系,从而构建每个智能体的期望子图,包括:
6.一种基于子矩阵选择的集群编队轨迹规划装置,其特征在于,包括:
7.一种计算机程序产品,包括计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现如权利要求1-5任一项所述的方法。
8.一种电子设备,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,该指令被处理器执行时实现如权利要求1-5中任一项所述方法的步骤。
技术总结
本发明公开了一种基于子矩阵选择的集群编队轨迹规划方法,包括:将集群编队抽象为图结构,图的节点为集群中的智能体,边为智能体之间的连接约束,边的权重为两个智能体间的欧氏距离的平方,从而构建图的拉普拉斯矩阵;基于矩阵最大迹,选取所述拉普拉斯矩阵中的若干列,形成所述拉普拉斯矩阵的最优子矩阵;根据所述最优子矩阵,重新确定每个智能体与其他智能体的连接关系,从而构建每个智能体的期望子图;基于每个智能体的期望子图,进行集群编队轨迹规划。改进了目前的分布式全连接的编队算法,旨在通过选取全连接拉普拉斯矩阵的子矩阵来减少连接约束,提升优化效率,保证编队性能的情况下,实现更大规模的分布式集群编队。
技术研发人员:高飞,周缘
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!