基于嵌入式算法的自行闭环优化的模型系统的制作方法
本发明属于自动控制,具体是指基于嵌入式算法的自行闭环优化的模型系统。
背景技术:
1、智能制造成为了全球制造业转型的重要趋势。自动控制技术作为智能制造的核心之一,近年来得到了快速发展,尤其是线性控制系统因其结构简单、易于实现而广泛应用于各种精密控制场合。传统的线性控制系统多依赖预设路径进行控制,缺乏自适应性和灵活性,在面对复杂多变的工作环境时难以达到理想的效果。
2、目前,为了提高控制系统的适应性和准确性,常见的做法包括:引入先进的传感器技术,通过增加外部反馈来改善控制性能,引入额外硬件(如高级传感器)不仅提高了系统的成本,还可能因为硬件故障导致整个系统瘫痪;应用更复杂的非线性控制策略,例如滑模控制、模糊逻辑控制,虽然这些方法可以在一定程度上提升控制效果,但同时也增加了系统的设计难度和成本其次,非线性控制策略虽然理论上可以提供更好的控制效果,但由于算法本身的复杂度,往往使得实际控制效果不如预期;基于经验设计的比例-积分-微分(pid)控制器,虽然可以有效处理某些动态变化的情况,但在复杂的环境中仍难以实现最佳控制。
技术实现思路
1、本发明要解决的技术问题是在面对复杂多变的工作环境时如何提高控制系统的适应性和准确性。
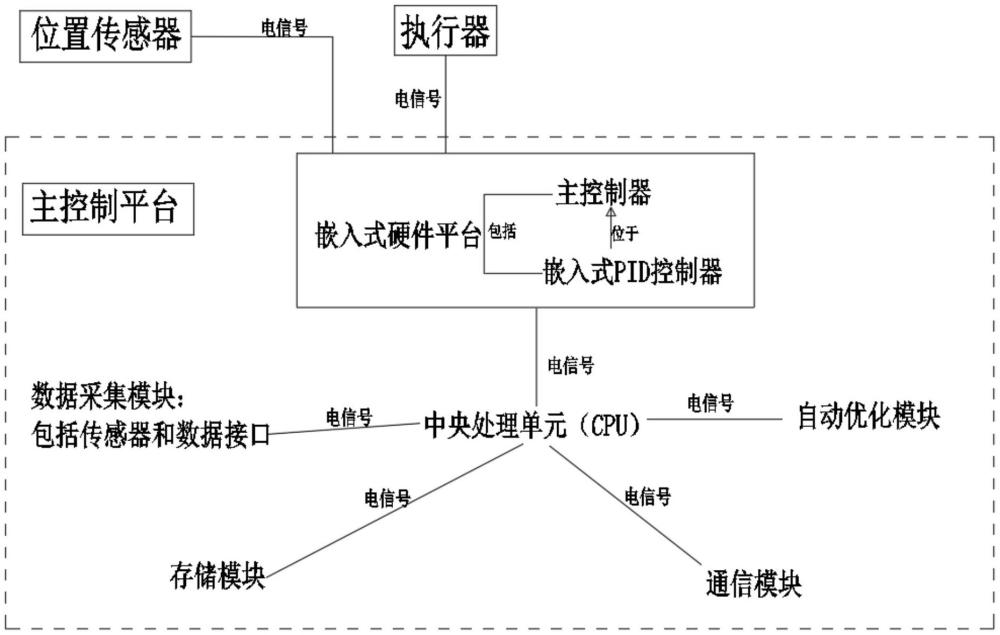
2、为解决上述问题,本发明采取的技术方案如下:本发明提出的基于嵌入式算法的自行闭环优化的模型系统,包括主控制平台、执行器以及位置传感器,所述主控制平台分别和执行器以及位置传感器电信号连接,所述主控制平台包括嵌入式硬件平台、数据采集模块、中央处理单元(cpu)以及存储模块,所述嵌入式硬件平台和执行器电信号连接,所述嵌入式硬件平台由主控制器组成,所述主控制器内设有嵌入式pid控制器,所述数据采集模块分别与位置传感器以及嵌入式硬件平台电信号连接,所述存储模块、嵌入式硬件平台均和中央处理单元(cpu)电信号连接。
3、进一步地,所述主控制器选用arm cortex-m系列微控制器,所述嵌入式pid控制器选用stm32系列mcu单片机。
4、进一步地,所述嵌入式pid控制器根据pid公式计算出下一时刻施加到执行器上的控制量u(t)=kpδ(t)+ki∫δ(τ)dτ+kddδ(t)/dt,其中δ(t)为执行器当前测量值与参考值之间的偏差、kp为比例增益、ki为积分增益、kd为微分增益。
5、进一步地,所述数据采集模块包括传感器和数据接口,所述传感器选用高精度mems传感器,所述数据接口设计兼容包括spi/i2c多种标准协议,以便接入不同类型的传感器。
6、进一步地,所述中央处理单元(cpu)的配置主频≥1ghz,负责运行核心算法和协调各组件的工作。
7、进一步地,所述存储模块选用flash存储器,容量≥8mb,保存模型参数、历史数据和配置文件。
8、进一步地,所述主控制平台还包括通信模块,所述通信模块支持wi-fi、ble和zigbee多种无线传输方式,支持与其他设备或云平台的数据交换。
9、进一步地,所述主控制平台还包括自动优化模块,所述自动优化模块集成嵌入式算法,基于深度强化学习框架开发,根据不同应用场景动态调整模型结构和超参数。
10、进一步地,所述通信模块以及自动优化模块均和中央处理单元(cpu)电信号连接。
11、进一步地,所述执行器根据具体应用场景选择不同类型的电机(直流电机、步进电机),所述位置传感器用于实时监测目标物体的实际位移情况并向主控制器反馈信息。
12、采用上述结构本发明取得的有益效果如下:
13、1、本方案提出的基于嵌入式算法的自行闭环优化的模型系统,通过嵌入式微处理器和pid控制算法的结合,大幅度提升了系统的自适应性和鲁棒性,能够在各种不确定的工况下维持良好的控制效果。
14、2、本方案提出的基于嵌入式算法的自行闭环优化的模型系统,由于采用了软硬件相结合的设计理念,无需大量添加昂贵的外围设备就能达到理想的性能提升,有效控制了整体成本。
15、3、本方案提出的基于嵌入式算法的自行闭环优化的模型系统,降低了对专业人员经验的依赖程度,减少了因人为因素引起的错误概率,同时也节省了大量的时间和人力资源。
16、4、本方案提出的基于嵌入式算法的自行闭环优化的模型系统,提高了整个生产过程的自动化水平和智能化程度,有助于推动相关行业的技术创新和发展。
技术特征:
1.基于嵌入式算法的自行闭环优化的模型系统,其特征在于:包括主控制平台、执行器以及位置传感器,所述主控制平台分别和执行器以及位置传感器电信号连接,所述主控制平台包括嵌入式硬件平台、数据采集模块、中央处理单元(cpu)以及存储模块,所述嵌入式硬件平台和执行器电信号连接,所述嵌入式硬件平台由主控制器组成,所述主控制器内设有嵌入式pid控制器,所述数据采集模块分别与位置传感器以及嵌入式硬件平台电信号连接,所述存储模块、嵌入式硬件平台均和中央处理单元(cpu)电信号连接。
2.根据权利要求1所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述主控制器选用arm cortex-m系列微控制器,所述嵌入式pid控制器选用stm32系列mcu单片机。
3.根据权利要求2所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述嵌入式pid控制器根据pid公式计算出下一时刻施加到执行器上的控制量u(t)=kpδ(t)+ki∫δ(τ)dτ+kddδ(t)/dt,其中δ(t)为执行器当前测量值与参考值之间的偏差、kp为比例增益、ki为积分增益、kd为微分增益。
4.根据权利要求3所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述数据采集模块包括传感器和数据接口,所述传感器选用高精度mems传感器,所述数据接口设计兼容包括spi/i2c多种标准协议,以便接入不同类型的传感器。
5.根据权利要求4所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述中央处理单元(cpu)的配置主频≥1ghz,负责运行核心算法和协调各组件的工作。
6.根据权利要求5所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述存储模块选用flash存储器,容量≥8mb,保存模型参数、历史数据和配置文件。
7.根据权利要求6所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述主控制平台还包括通信模块,所述通信模块支持wi-fi、ble和zigbee多种无线传输方式,支持与其他设备或云平台的数据交换。
8.根据权利要求7所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述主控制平台还包括自动优化模块,所述自动优化模块集成嵌入式算法,基于深度强化学习框架开发,根据不同应用场景动态调整模型结构和超参数。
9.根据权利要求8所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述通信模块以及自动优化模块均和中央处理单元(cpu)电信号连接。
10.根据权利要求9所述的基于嵌入式算法的自行闭环优化的模型系统,其特征在于:所述执行器根据具体应用场景选择不同类型的电机(直流电机、步进电机),所述位置传感器用于实时监测目标物体的实际位移情况并向主控制器反馈信息。
技术总结
本发明公开了基于嵌入式算法的自行闭环优化的模型系统,其结构包括主控制平台、执行器以及位置传感器,所述主控制平台分别和执行器以及位置传感器电信号连接,所述主控制平台包括嵌入式硬件平台、数据采集模块、中央处理单元(CPU)以及存储模块,所述嵌入式硬件平台和执行器电信号连接,所述嵌入式硬件平台由主控制器组成,所述主控制器内设有嵌入式PID控制器,所述数据采集模块分别与位置传感器以及嵌入式硬件平台电信号连接,所述存储模块、嵌入式硬件平台均和中央处理单元(CPU)电信号连接。本发明属于自动控制技术领域,具体是指基于嵌入式算法的自行闭环优化的模型系统。
技术研发人员:江世宽,赵鑫,刘广华,廖路,崔城龙
受保护的技术使用者:国能信控技术股份有限公司
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!