一种基于驱动裕度的智能机器人运动控制方法与流程
本发明涉及运动规划,特别涉及一种基于驱动裕度的智能机器人运动控制方法。
背景技术:
1、由于地外天体表面原始自然地形起伏多变,凹凸不平,岩石和沙地力学特性变化,因此,当地外探测轮式智能机器人在天体表面移动时,极易发生滑移滑转。为了保证机器人的稳定工作,需要控制机器人每个车轮的牵引力。
2、目前,地外探测轮式智能机器人的牵引控制主要采用运动学控制方法,该方法主要基于运动学模型进行轮速分配。但在地外探测中,由于机器人每个车轮所处的环境和所受的接触力均不同,因此,该方法确定出的各车轮产生的牵引力不协调,无法使得整个车体牵引力最优,容易造成机器人滑移或沉陷在松软起伏的地面上。
3、因此,目前亟待需要一种基于驱动裕度的智能机器人运动控制方法来解决上述问题。
技术实现思路
1、本发明提供了一种基于驱动裕度的智能机器人运动控制方法,可以防止和减少机器人移动时发生滑移或沉陷在松软起伏的地面上。技术方案如下:
2、一方面,提供了一种基于驱动裕度的智能机器人运动控制方法,方法包括:
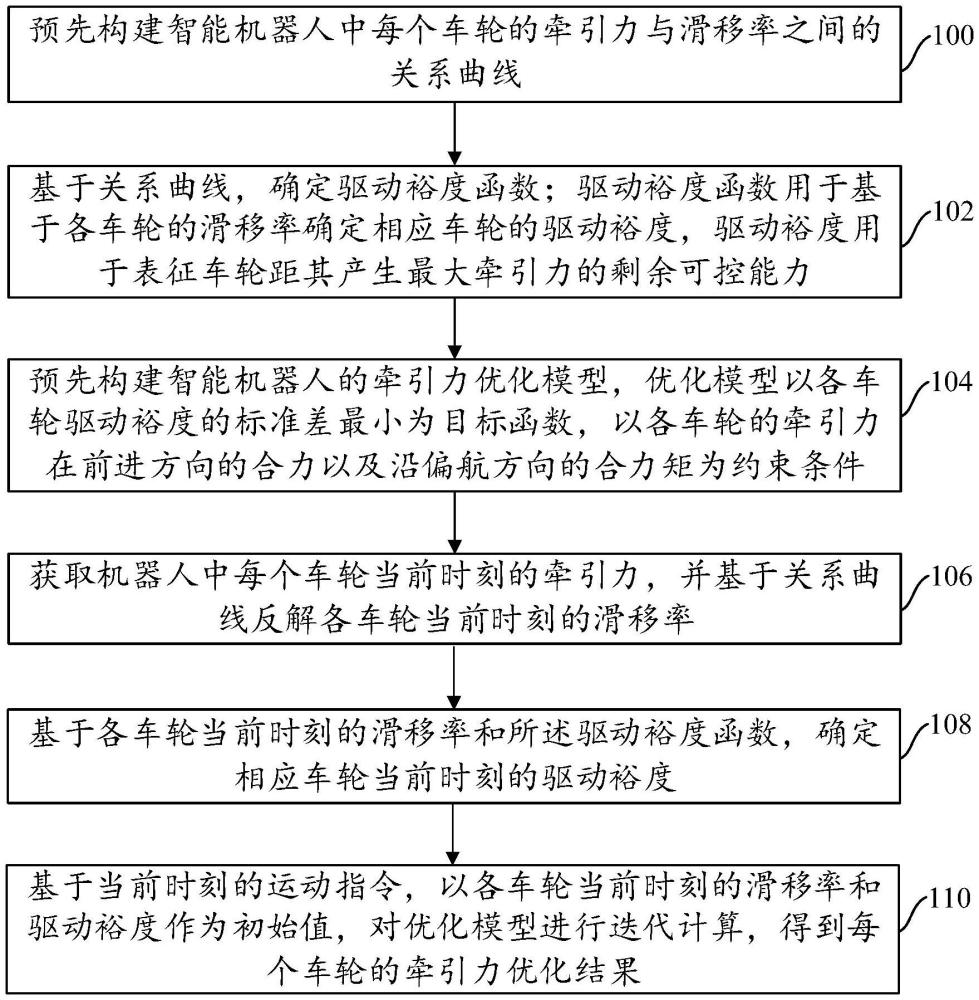
3、预先构建智能机器人中每个车轮的牵引力与滑移率之间的关系曲线;
4、基于所述关系曲线,确定驱动裕度函数;所述驱动裕度函数用于基于各车轮的滑移率确定相应车轮的驱动裕度,所述驱动裕度用于表征车轮距其产生最大牵引力的剩余可控能力;
5、预先构建所述智能机器人的牵引力优化模型,所述优化模型以各车轮驱动裕度的标准差最小为目标函数,以各车轮的牵引力在前进方向的合力以及沿偏航方向的合力矩为约束条件;
6、获取所述机器人中每个车轮当前时刻的牵引力,并基于所述关系曲线反解各车轮当前时刻的滑移率;
7、基于各车轮当前时刻的滑移率和所述驱动裕度函数,确定相应车轮当前时刻的驱动裕度;
8、基于当前时刻的运动指令,以各车轮当前时刻的滑移率和驱动裕度作为初始值,对所述优化模型进行迭代计算,得到每个车轮的牵引力优化结果。
9、另一方面,提供了一种基于驱动裕度的智能机器人运动控制装置,装置包括:
10、第一构建单元,用于预先构建智能机器人中每个车轮的牵引力与滑移率之间的关系曲线;
11、第一确定单元,用于基于所述关系曲线,确定驱动裕度函数;所述驱动裕度函数用于基于各车轮的滑移率确定相应车轮的驱动裕度,所述驱动裕度用于表征车轮距其产生最大牵引力的剩余可控能力;
12、第二构建单元,用于预先构建所述智能机器人的牵引力优化模型,所述优化模型以各车轮驱动裕度的标准差最小为目标函数,以各车轮的牵引力在前进方向的合力以及沿偏航方向的合力矩为约束条件;
13、获取单元,用于获取所述机器人中每个车轮当前时刻的牵引力,并基于所述关系曲线反解各车轮当前时刻的滑移率;
14、第二确定单元,用于基于各车轮当前时刻的滑移率和所述驱动裕度函数,确定相应车轮当前时刻的驱动裕度;
15、优化单元,用于基于当前时刻的运动指令,以各车轮当前时刻的滑移率和驱动裕度作为初始值,对所述优化模型进行迭代计算,得到每个车轮的牵引力优化结果。
16、另一方面,提供了一种计算机可读存储介质,存储介质内存储有计算机程序,计算机程序被处理器执行时实现上述基于驱动裕度的智能机器人运动控制方法的步骤。
17、另一方面,提供了一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现上述的基于驱动裕度的智能机器人运动控制方法的步骤。
18、本发明实施例提供了一种基于驱动裕度的智能机器人运动控制方法,该方法首先提出了驱动裕度的概念,以基于驱动裕度反映车轮距其产生最大牵引力的剩余可控能力。然后,在进行牵引力优化时,以各车轮驱动裕度的标准差最小为目标函数,可以保证各车轮的驱动裕度平衡,即各车轮都得的有效牵引;以各车轮的牵引力在前进方向的合力以及沿偏航方向的合力矩为约束条件,可以保证各车轮的综合牵引力最优。如此,能够根据当前不同车轮的滑移情况优化每个车轮的牵引力,进而提高机器人的通过能力,从主动控制的角度防止和减少运动中滑移和沉陷在松软起伏地面上的发生。
技术特征:
1.一种基于驱动裕度的智能机器人运动控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述关系曲线是基于地面试验确定的,确定方法如下:
3.根据权利要求1所述的方法,其特征在于,所述驱动裕度函数的计算公式为:
4.根据权利要求3所述的方法,其特征在于,所述目标函数为:
5.根据权利要求4所述的方法,其特征在于,所述约束条件为:
6.一种基于驱动裕度的智能机器人运动控制装置,其特征在于,所述装置包括:
7.根据权利要求6所述的装置,其特征在于,所述关系曲线是基于地面试验确定的,确定方法如下:
8.根据权利要求6所述的装置,其特征在于,所述驱动裕度函数的计算公式为:
9.一种计算机设备,其特征在于,所述计算机设备包括存储器和处理器,所述存储器用于存放计算机程序,所述处理器用于执行所述存储器上所存放的计算机程序,以实现上述权利要求1-5任一所述方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-5任一所述的方法的步骤。
技术总结
本发明公开了一种基于驱动裕度的智能机器人运动控制方法。方法包括:预先构建智能机器人中每个车轮的牵引力与滑移率之间的关系曲线;基于关系曲线,确定驱动裕度函数;预先构建智能机器人的牵引力优化模型,优化模型以各车轮驱动裕度的标准差最小为目标函数,以各车轮的牵引力在前进方向的合力以及沿偏航方向的合力矩为约束条件;获取机器人中每个车轮当前时刻的牵引力,基于关系曲线反解各车轮当前时刻的滑移率;基于各车轮当前时刻的滑移率和所述驱动裕度函数,确定相应车轮当前时刻的驱动裕度;基于当前时刻的运动指令,以各车轮当前时刻的滑移率和驱动裕度作为初始值,对优化模型进行迭代计算,得到优化结果。本申请可以减少机器人发生滑移或沉陷。
技术研发人员:邢琰,杨伟奇,滕宝毅,张洪嘉,胡勇
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2025/3/3
- 还没有人留言评论。精彩留言会获得点赞!