事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法
本发明属于控制,涉及事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法。
背景技术:
1、在农业生产现代化背景下,人们对农机自动驾驶技术的兴趣越来越大。自动农机的出现,在提高农作物产量,提高农民生活水平方面发挥了不可替代的作用。精确的轨迹跟踪控制是实现农机自动驾驶的关键技术,对节省人力成本投入、提高作业精度具有重要意义。目前主流的轨迹跟踪控制算法有:模糊逻辑控制、经典控制理论、滑模控制、增强型pid控制以及模型预测控制(mpc)等。非线性模型预测控制(nmpc)作为一个多变量控制器,能够较好的预测车辆未来状态,处理各种约束条件,被广泛应用在农机自动驾驶中。很多农机非线性模型预测控制轨迹跟踪工作是基于运动学模型展开的,虽然模型构建简单,但是损失了模型的精确性,对控制精度产生不利的影响。部分学者采用精度更高的动力学模型进行控制器设计,但是往往只考虑农机横向控制,没有将纵向控制引入控制系统,在农机作业过程中会损失纵向跟踪精度来补偿横向精度。基于动力学模型的模型预测控制器对模型的准确性有更高的要求,但是往往忽略了农机受到的外部扰动以及模型参数不确定性。然而由于农田环境相对复杂,土地环境较为松软、湿滑、凹凸不平,不可避免地给农机运行过程的轨迹跟踪控制带来未知扰动影响。除此之外,受农机自身机械老化影响,农机的自身参数也会发生摄动,如轮胎的侧偏刚度,惯性力矩以及自身质量也会发生变化,对农机动力学模型的精确建立带来了困难。尽管经典非线性模型预测控制在提高控制精度方面表现出色,但有较大的计算复杂度和计算量,在实际应用中,需要权衡计算效率与控制性能之间的关系,确保系统的实时性和可靠性,如何节省计算资源也是需要考虑的问题。
技术实现思路
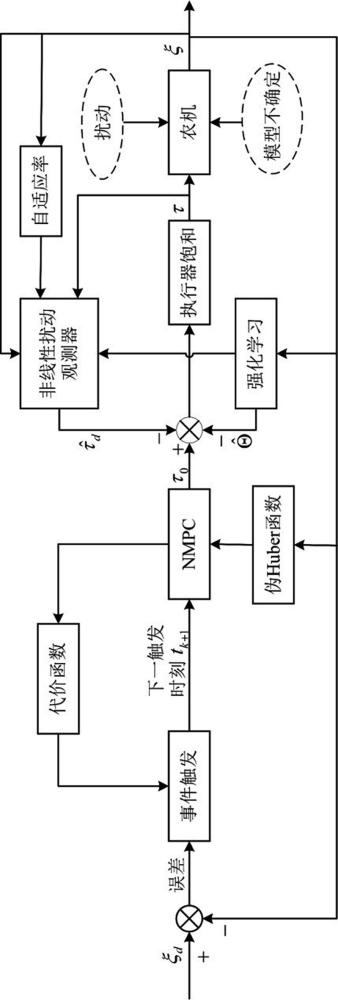
1、为了解决现有技术存在的诸多问题,本发明提出了一种改进的非线性模型预测控制方法。控制输入为后轮纵向牵引力及前轮转角,控制变量为车辆位置及横摆角。用伪胡贝尔函数改进代价函数提高转弯控制性能。引入强化学习演员-评论家神经网络(acnn)对模型的不确定项进行近似。采用自适应非线性扰动观测器(ndob)对未知时变扰动进行估计,增强了控制器的鲁棒性。设计事件触发机制,降低nmpc的计算频率,以节省计算资源。
2、本发明解决其技术问题采用的技术方案是:事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,包括:
3、建立农机横纵向动力学模型及其状态空间方程,对农机运行轨迹进行跟踪;
4、构建改进的非线性模型预测控制系统,改进的非线性模型预测控制系统包括伪胡贝尔函数改进代价函数的农机标称系统非线性控制器,求解农机标称系统的控制输入;优化求解器,采用强化学习演员-评论家算法逼近农机模型不确定性补偿;利用自适应参数非线性扰动观测器估计补偿农机受到的外界扰动;通过事件触发机制,根据农机轨迹跟踪的真实值和参考值之间的误差来判断是否触发优化求解器优化求解;最终得到农机轨迹跟踪控制器的输入:
5、;
6、;
7、;
8、其中,和分别表示农机牵引力和前轮转角的输入上、下限;为农机标称系统的控制输入;为模型不确定性;为自适应扰动观测器估计值;为自适应率。
9、优选地,所述伪胡贝尔函数改进代价函数的农机标称系统非线性控制模型的目标函数及其约束条件具体为:
10、;
11、;
12、其中,表示时刻标称系统最优求解控制输入序列;表示系统的状态约束集合;是终端域;为预测时域,为控制时域且; 是终端代价,是加权矩阵;
13、为阶段代价函数,对速度和控制输入采用二次惩罚,表示为:
14、;
15、是对速度进行惩罚的加权矩阵,是对控制输入的惩罚矩阵;分别是纵向速度,横向速度和横摆角速度;是农机横摆角;表示时刻,表示步长;和分别表示大地坐标系下的位置坐标;
16、选择位置代价作为伪胡贝尔函数,通过加权,惩罚农机横纵向实际位姿与期望位姿之间的差异,表示为:
17、;
18、其中,为正设计参数;农机航向代价通过加权,惩罚农机航向环绕,表示为:
19、。
20、优选地,强化学习演员-评论家算法逼近农机模型不确定性补偿表示如下:
21、;
22、其中,是最优权重矩阵的估计,是演员神经网络基函数向量;是输入向量,是近似误差。
23、优选地,自适应参数非线性扰动观测器表示如下:
24、;
25、其中,是对未知扰动的估计,为中间状态变量,是设计的参数矩阵,;和为标称系数矩阵;为控制系统的状态向量;
26、自适应率设计为:
27、;
28、其中,为设计正参数,为自适应参数初始值,为设计参数。
29、优选地,事件触发机制为:
30、;
31、其中,表示标称系统控制输入;表示时刻标称系统最优求解控制输入序列;为预测时域,为设定的农机实际运行轨迹与参考轨迹之间的误差阈值;为当前触发时刻,为下一触发时刻;表示在时刻后步长时刻的系统状态;为设定的参考轨迹;为向量的二范数,范数,表示转置,是加权矩阵。
32、与现有技术相比,本发明具有的有益效果是:
33、(1)建立农机横纵向动力学模型,考虑了位置扰动和模型不确定性,对农机横向控制的同时,兼顾纵向运动控制。使用伪胡贝尔函数改进非线性模型预测控制代价函数,提高农机在转弯轨迹的跟踪精度;
34、(2)提出了一种包含自适应参数的扰动观测器,估计未知时变扰动并将其补偿到输入中以增强非线性预测控制器的鲁棒性。采用强化学习演员-评论家神经网络来处理模型不确定性,在扰动观测器和非线性预测控制器设计过程中对不确定性进行了逼近补偿;
35、(3)基于剩余未知时变扰动和不确定性引起的状态预测偏差,设计了一种基于事件触发的非线性模型预测控制优化求解触发策略。基于系统状态与参考轨迹之间的误差,设计了事件触发机制。只有当误差达到触发水平时才需要求解优化问题,这减少了需要优化求解的频率,节省了计算资源;
36、(4)设计了类s型参考轨迹模拟农机真实工作场景,验证了所提算法的鲁棒性和有效性,优化问题可以在毫秒级解决,满足实时性要求。
技术特征:
1.事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,其特征在于,包括:
2.根据权利要求1所述的事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,其特征在于,所述伪胡贝尔函数改进代价函数的农机标称系统非线性控制模型的目标函数及其约束条件具体为:
3.根据权利要求1所述的事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,其特征在于,强化学习演员-评论家算法逼近农机模型不确定性补偿表示如下:
4.根据权利要求1所述的事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,其特征在于,自适应参数非线性扰动观测器表示如下:
5.根据权利要求1所述的事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法,其特征在于,事件触发机制为:
技术总结
本发明属于控制技术领域,涉及事件触发的鲁棒非线性模型预测控制农机轨迹跟踪方法。该方法包括:建立农机横纵向动力学模型及其状态空间方程,对农机运行轨迹进行跟踪;构建改进的非线性模型预测控制系统,改进的非线性模型预测控制系统包括伪胡贝尔函数改进代价函数的农机标称系统非线性控制器,求解农机标称系统的控制输入;优化求解器,采用强化学习演员‑评论家算法逼近农机模型不确定性补偿;利用自适应参数非线性扰动观测器估计补偿农机受到的外界扰动;通过事件触发机制,根据农机轨迹跟踪的真实值和预测值之间的误差来判断是否触发优化求解器优化求解,得到农机轨迹跟踪控制器的输入。本发明增强了控制系统的鲁棒性,降低了计算频率。
技术研发人员:吕成兴,陈刚,高乾,陈健,田艳兵,杨智博,王言前,许洪祖,薛冰川,徐蕾,徐祥谦
受保护的技术使用者:青岛理工大学
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!