基于“重浮力+舵”的水下航行器行进间联合操纵控制方法
本申请涉及基于“重浮力+舵”的水下航行器行进间联合操纵控制方法领域,尤其涉及一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法和水下航行器。
背景技术:
1、当自主水下航行器(autonomous underwater vehicle,auv)执行下潜任务或是在不同深度作业时,自身浮力会随着深度的变化而变化,这主要是由于auv与海水的物理参数(例如,auv自身在不同压强情况下的体积压缩率以及海水在不同深度的温度收缩率和海水密度变化率)不一致而引起的,而不平衡力与不平衡力矩的出现,会改变航行器的平衡态,从而会增大航行器的平衡攻角与平衡舵角,增大航行器的航行阻力,加剧航行器的能源消耗导致航行器的作业时长缩短,作业品质下降。
技术实现思路
1、本申请的主要目的在于提供一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法和水下航行器,旨在解决基于“重浮力+舵”的水下航行器行进间联合操纵控制方法的技术问题。
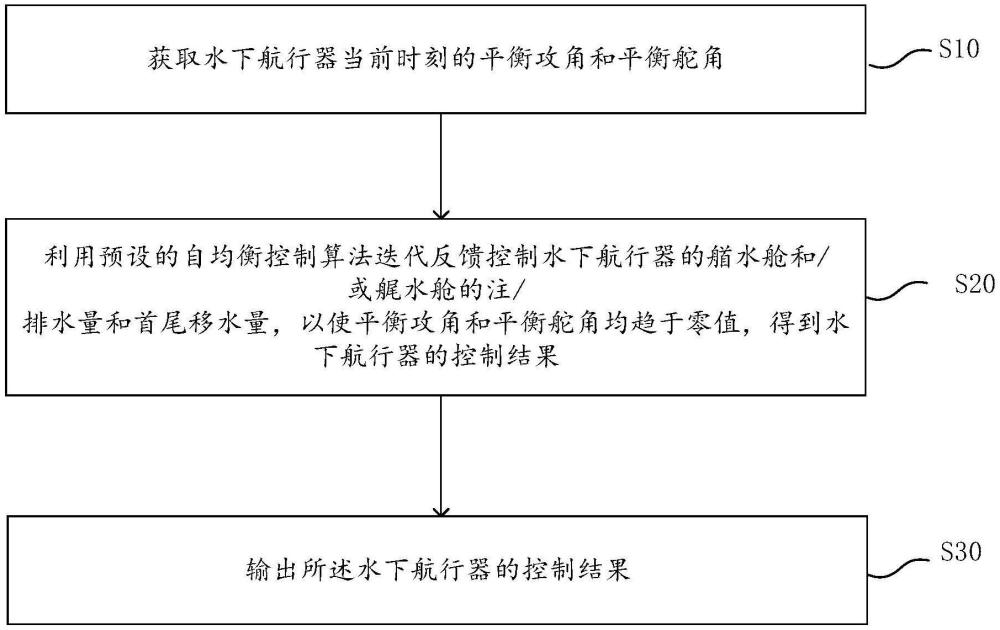
2、为了实现上述目的,本申请提供一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,包括:获取水下航行器当前时刻的平衡攻角和平衡舵角;利用预设的自均衡控制算法迭代反馈控制所述水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,以使所述平衡攻角和所述平衡舵角均趋于零值,得到所述水下航行器的控制结果;输出所述水下航行器的控制结果。
3、可选地,所述利用预设的自均衡控制算法迭代反馈控制所述水下航行器的所述艏水舱和/或所述艉水舱的所述注/排水量值和所述首尾移水量值,以使所述平衡攻角和所述平衡舵角均趋于零值,包括:获取所述自均衡控制算法中预设的排水量计算表达式和首尾移水量计算表达式;基于所述排水量计算表达式和所述首尾移水量计算表达式计算所述水下航行器的所述艏水舱和/或所述艉水舱的所述注/排水量值和所述首尾移水量值;根据所述注/排水量值和所述首尾移水量值控制所述水下航行器的所述艏水舱和/或所述艉水舱注入/排出对应的水量,得到一次迭代反馈控制后的所述水下航行器的新的平衡攻角和新的平衡舵;根据所述新的平衡攻角和所述新的平衡舵开始下一轮迭代反馈控制所述下航行器的所述艏水舱和/或所述艉水舱的所述注/排水量值和所述首尾移水量值,直至所述平衡攻角和所述平衡舵角均趋于零值。
4、可选地,所述方法还包括:获取所述水下航行器的深度数据、姿态角数据和姿态角速度数据;在所述pid控制算法中输入所述深度数据、所述姿态角数据和所述姿态角速度数据,得到所述水下航行器的艏水平舵角、艏垂直舵角、艉水平舵角、艉垂直舵角及艉差动舵角;
5、利用所述艏水平舵角、所述艏垂直舵角、所述艉水平舵角、所述艉垂直舵角及所述艉差动舵角反馈控制所述水下航行器的艏舵和艉舵。
6、可选地,所述获取水下航行器当前时刻的平衡攻角和平衡舵角,包括:基于艏水平舵角、艏垂直舵角确定艏平衡攻角,基于艉水平舵角、艉垂直舵角确定艉平衡攻角;基于所述艏水平舵角获取所述艏平衡舵角,基于所述艉水平舵角获取所述艉平衡舵角。
7、可选地,所述预设的排水量计算表达式和首尾移水量计算表达式,包括:
8、
9、其中,系数ai、bi(i=1,2,3)为均衡常数,
10、z′w、和分别为水下航行器的各水动力参数,m′w、和m′θ分别为水下航行器的水动力矩参数,ρ为海水密度,l为水下航行器的长度,v为水下航行器的速度,lvbs为水下航行器的艏、艉重浮力调节水舱之间的距离,δb艏水平舵角,δs艉水平舵角,θ平衡攻角。
11、此外,为了实现上述目的,本申请还提供一种水下航行器行,包括:第一变浮力装置、第二变浮力装置、自均衡控制器和至少两个数据采集器;所述第一变浮力装置和所述第二变浮力装置分别设置于所述水下航行器的艏部和艉部,且所述第一变浮力装置和所述第二变浮力装置均通信连接所述自均衡控制器;至少两个所述数据采集器设置于所述水下航行器,且至少两个所述数据采集器均通信连接所述自均衡控制器;其中,至少两个所述数据采集器用于采集所述水下航行器的深度数据、姿态角数据和姿态角速度数据;所述自均衡控制器用于执行上述任一实施例提供的基于“重浮力+舵”的水下航行器行进间联合操纵控制方法得到第一控制指令,并发送所述第一控制指令;所述第一变浮力装置和所述第二变浮力装置用于响应于所述第一控制指令,注入/排出与所述第一控制指令携带的注入水量值/排出水量值相等的水量。
12、可选地,还包括:操舵控制器,设置于所述水下航行器,分别通信连接至少两个所述数据采集器,所述操舵控制器用于采用所述pid控制算法处理从至少两个所述数据采集器获得的所述深度数据、所述姿态角数据和所述姿态角速度数据,得到所述水下航行器的艏水平舵角、艏垂直舵角、艉水平舵角、艉垂直舵角及艉差动舵角,并利用所述艏水平舵角、所述艏垂直舵角、所述艉水平舵角、所述艉垂直舵角及所述艉差动舵角反馈控制所述水下航行器的艏舵和艉舵。
13、可选地,至少两个所述数据采集器中的一个为惯导装置,所述惯导装置用于获取所述姿态角和所述姿态角速度。
14、本申请实施例提出的一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法和水下航行器,通过获取水下航行器当前时刻的平衡攻角和平衡舵角;利用预设的自均衡控制算法迭代反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,以使平衡攻角和平衡舵角均趋于零值,得到水下航行器的控制结果;输出水下航行器的控制结果,本申请反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,可改善由于初始配重浮力过大而引起的航行品质下降的问题,在航行过程中,反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,可有效降低平衡攻角与平衡舵角,从而大大减小航行过程中的阻力,节能能源,延长作业时间。
技术特征:
1.一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,其特征在于,包括:
2.如权利要求1所述的基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,其特征在于,所述利用预设的自均衡控制算法迭代反馈控制所述水下航行器的所述艏水舱和/或所述艉水舱的所述注/排水量值和所述首尾移水量值,以使所述平衡攻角和所述平衡舵角均趋于零值,包括:
3.如权利要求1所述的基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,其特征在于,所述方法还包括:
4.如权利要求3所述的基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,其特征在于,所述获取水下航行器当前时刻的平衡攻角和平衡舵角,包括:
5.如权利要求1所述的基于“重浮力+舵”的水下航行器行进间联合操纵控制方法,其特征在于,所述预设的排水量计算表达式和首尾移水量计算表达式,包括:
6.一种水下航行器行,其特征在于,包括:
7.如权利要求6所述的一种水下航行器行,其特征在于,还包括:
8.如权利要求6所述的一种水下航行器行,其特征在于,至少两个所述数据采集器中的一个为惯导装置,所述惯导装置用于获取所述姿态角和所述姿态角速度。
技术总结
本申请公开了一种基于“重浮力+舵”的水下航行器行进间联合操纵控制方法和水下航行器,通过获取水下航行器当前时刻的平衡攻角和平衡舵角;利用预设的自均衡控制算法迭代反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,以使平衡攻角和平衡舵角均趋于零值,得到水下航行器的控制结果;输出水下航行器的控制结果,本申请反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,可改善由于初始配重浮力过大而引起的航行品质下降的问题,在航行过程中,反馈控制水下航行器的艏水舱和/或艉水舱的注/排水量和首尾移水量,可有效降低平衡攻角与平衡舵角,从而大大减小航行过程中的阻力,节能能源,延长作业时间。
技术研发人员:高剑,高磊峰,张福斌,李乐,潘光,任豪,王佳润
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!