基于无人机的冷链库物品取置方法与流程
本发明涉及无人机路径规划领域,具体涉及一种基于无人机的冷链库物品取置方法。
背景技术:
1、目前rfid技术广泛应用于冷链库房项目当中,但是目前冷链库房在物品取置过程中,存在实物与rfid标签读取记录不一致的情况,为了确认数据一致且正确,需要进行操作台人工核对等措施规避错误。
2、现有技术中冷链库房在物品取置过程中,冷库的低温环境,2-6度,会导致入库取货品的人员存在体感不适合的状况。因此考虑在冷链库房加入无人机,但多无人机在接收取货订单数据进行拣货过程时飞行路径互为交叉,容易发生飞行事故,考虑到冷库属于特殊场合,设置无人机路径和管理有序取置货品流程。
3、因此,亟需一种基于无人机的冷链库物品取置方法。
技术实现思路
1、本发明一种基于无人机的冷链库物品取置方法,解决现有技术的问题。
2、第一方面,本发明提供一种基于无人机的冷链库物品取置方法,包括:
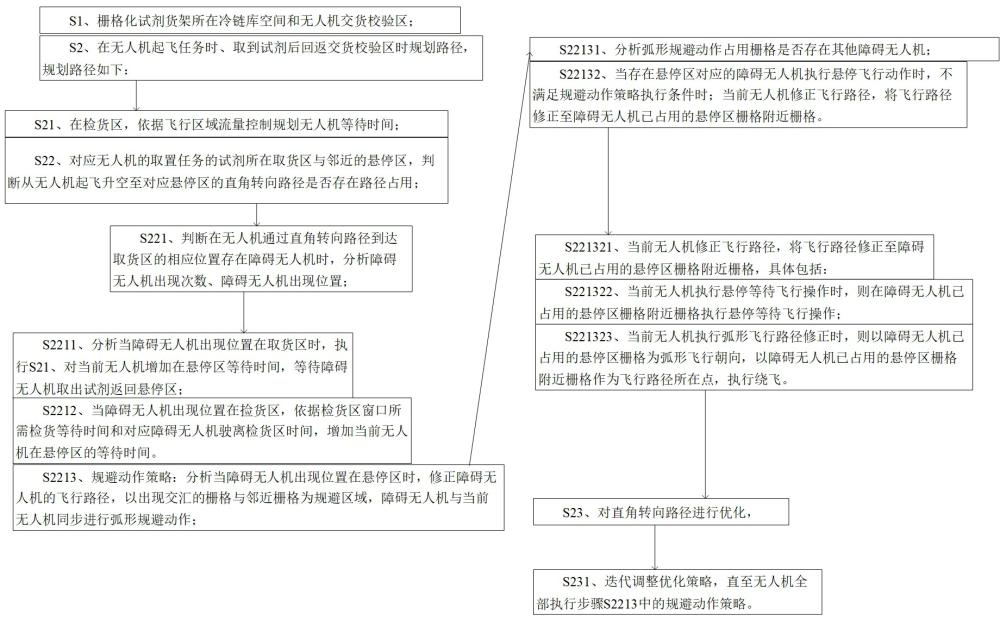
3、栅格化试剂货架所在冷链库空间和无人机交货校验区;
4、在无人机起飞和返航时规划路径,规划路径如下:
5、在无人机起飞任务和取到试剂后回返交货校验区执行路径规划,规划路径如下:
6、根据栅格化的货架栅格占用情况规划三维空间下到达目的地最短时间的路径;
7、其中,无人机起飞即无人机自交货校验区接收物品取置任务起飞,进行路径规划到试剂货架取物;无人机返航即无人机自试剂货架路径规划回交货校验区。
8、进一步的,包括:对栅格化冷链库空间分区为拣货区和货架区;
9、在拣货区,依据飞行区域流量控制规划无人机等待时间;
10、将货架区分开为取货区和悬停区,悬停区为栅格化的货架顶部至天花板的领空区域,即无人机在货架顶部与天花板之间的空间悬停;
11、对应无人机的取置任务的试剂所在取货区与邻近的悬停区,判断从无人机起飞升空至对应所述悬停区的直角转向路径是否存在路径占用;
12、直角转向路径为穿过三维空间栅格的中心的路径且转向为直角转向;
13、规划无人机飞行路径。
14、进一步的,判断在无人机通过直角转向路径到达取货区的相应位置存在障碍无人机时,分析障碍无人机出现次数、障碍无人机出现位置;
15、分析当障碍无人机出现位置在取货区时,对当前无人机增加在悬停区等待时间,等待障碍无人机取出试剂返回悬停区;
16、规避动作策略:分析当障碍无人机出现位置在悬停区时,修正障碍无人机的飞行路径,以出现交汇的栅格与邻近栅格为规避区域,障碍无人机与当前无人机同步进行弧形规避动作;
17、分析所述弧形规避动作占用栅格是否存在其他障碍无人机,同步对其他障碍无人机执行所述规避动作策略,
18、进一步的,对所述直角转向路径进行优化,优化策略为:
19、对直角转向路径以转向点所在栅格和邻近栅格执行弧形飞行路径修正,并分析所述弧形飞行路径是否对其他无人机产生干扰,当产生干扰时,同步对产生干扰的其他无人机在产生干扰的栅格执行所述规避动作策略。
20、进一步的,还包括:迭代调整所述优化策略,直至无人机全部执行所述规避动作策略。
21、进一步的,还包括当障碍无人机出现位置在拣货区,依据拣货区窗口所需拣货等待时间和对应障碍无人机驶离拣货区时间,增加当前无人机在所述悬停区的等待时间。
22、进一步的,当存在悬停区对应的障碍无人机执行悬停飞行动作时,不满足规避动作策略执行条件时;
23、当前无人机修正飞行路径,将飞行路径修正至障碍无人机已占用的悬停区栅格附近栅格。
24、进一步的,所述当前无人机修正飞行路径,将飞行路径修正至障碍无人机已占用的悬停区栅格附近栅格,具体包括:
25、当前无人机执行悬停等待飞行操作时,则在所述障碍无人机已占用的悬停区栅格附近栅格执行悬停等待飞行操作;
26、当前无人机执行弧形飞行路径修正时,则以所述障碍无人机已占用的悬停区栅格为弧形飞行朝向,以所述障碍无人机已占用的悬停区栅格附近栅格作为飞行路径所在点,执行绕飞。
27、本发明提供的一种基于无人机的冷链库物品取置方法,运用栅格化路径规划,保证试剂取货效率,试剂取置任务智能化、有序化进行。
技术特征:
1.一种基于无人机的冷链库物品取置方法,其特征在于,包括:
2.根据权利要求1所述的一种基于无人机的冷链库物品取置方法,其特征在于,包括:对栅格化冷链库空间分区为拣货区和货架区;
3.根据权利要求2所述的一种基于无人机的冷链库物品取置方法,其特征在于,判断在无人机通过直角转向路径到达取货区的相应位置存在障碍无人机时,分析障碍无人机出现次数、障碍无人机出现位置;
4.根据权利要求3所述的一种基于无人机的冷链库物品取置方法,其特征在于,对所述直角转向路径进行优化,优化策略为:
5.根据权利要求4所述的一种基于无人机的冷链库物品取置方法,其特征在于,还包括:迭代调整所述优化策略,直至无人机全部执行所述规避动作策略。
6.根据权利要求5所述的一种基于无人机的冷链库物品取置方法,其特征在于,还包括当障碍无人机出现位置在拣货区,依据拣货区窗口所需拣货等待时间和对应障碍无人机驶离拣货区时间,增加当前无人机在所述悬停区的等待时间。
7.根据权利要求5或3所述的一种基于无人机的冷链库物品取置方法,其特征在于,当存在悬停区对应的障碍无人机执行悬停飞行动作时,不满足规避动作策略执行条件时;
8.根据权利要求7所述的一种基于无人机的冷链库物品取置方法,其特征在于,所述当前无人机修正飞行路径,将飞行路径修正至障碍无人机已占用的悬停区栅格附近栅格,具体包括:
技术总结
本发明公开了一种基于无人机的冷链库物品取置方法,涉及无人机路径规划领域,本发明包括,栅格化试剂货架所在冷链库空间和无人机交货校验区;无人机自交货校验区接收物品取置任务起飞,进行路径规划到试剂货架取物,然后路径规划回交货校验区;在无人机起飞和返航时规划路径,规划路径如下:根据栅格化的货架栅格占用情况规划三维空间下到达目的地最短时间的路径。本发明提供的一种基于无人机的冷链库物品取置方法,运用栅格化路径规划,保证试剂取货效率,试剂取置任务智能化、有序化进行。
技术研发人员:张仕利,干杰,甘天智,陈道斌,袁小松,刘学贵
受保护的技术使用者:眉山市人民医院
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!