模块化自动驾驶系统以及自动驾驶车辆的制作方法
本申请涉及靶车,具体公开了模块化自动驾驶系统以及自动驾驶车辆。
背景技术:
1、靶车:通过移动小车实现靶子的移动,目前对于这种靶车而言,很多还是采用小型柴油机来作为驱动件;
2、在驱动上不存在任何技术问题,现在的问题是:靶车使用环境是靶场,对于靶车的移动而言,通常采用遥控,遥控本质也没有问题,但是如果靶车作为考核目标而言,就会出问题,例如:当靶车作为考核目标时,前一个遥控人控制的靶车的路线比较简单,对于考核人而言,考核分数就会比较高,同理,后一个遥控人控制的靶车的路线比较复杂,还存在急刹急转弯等等,对于考核人而言,考核分数就会比较低,这就出现了明显不公平,目前,这种由于靶车均是人为遥控的,这种不公平无法绝对规避,因此,鉴于此,发明人模块化自动驾驶系统以及自动驾驶车辆。
技术实现思路
1、本实用新型的目的在于解决了传统的靶车考核由于路线不统一导致的考核不公平的问题。
2、为了达到上述目的,本实用新型提供以下基础方案:
3、模块化自动驾驶系统以及自动驾驶车辆,包括:
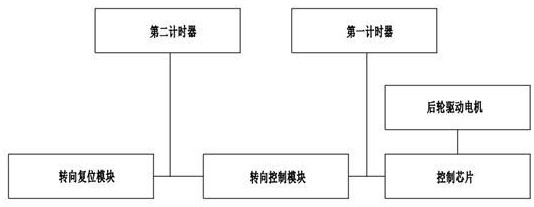
4、包括控制芯片:用于实现靶车内部的电子元器件的整体控制,并接受外界指令发出对应的指令;
5、转向控制模块:用于控制电子转向器,实现靶车的转弯;
6、第一计时器:用于确定转向控制模块的介入时间,转向控制模块的介入之前,靶车均为直线运动;
7、第二计时器:用于确定转向控制模块的工作时间,即靶车转弯时间;
8、转向复位模块:用于控制电子转向器复位,即回归到靶车为直线运动的状态。
9、本基础方案的原理及效果在于:
10、1.与现有技术相比,本装置结构简单,构思巧妙,本装置的目的在于使得靶车射击训练更加公平,解决了传统的靶车考核由于路线不统一导致的考核不公平的问题。
11、2.与现有技术相比,本装置可以规定路线的自动驾驶,只要靶车起点保持一致,靶车的运动轨迹是一样,对于考核人而言,就不存在考核不公平的情况。
12、进一步,所述控制芯片采用英伟达车机级专用芯片。
13、进一步,还包括天线模块,用于接收外界的电信号进而控制靶车内部的电子元器件。
14、进一步,所述车辆采用电池包作为车辆的驱动能源。
15、进一步,所述电池包为磷酸铁锂电池包。
技术特征:
1.模块化自动驾驶系统,其特征在于:包括:
2.根据权利要求1所述的模块化自动驾驶系统,其特征在于,所述控制芯片采用英伟达车机级专用芯片。
3.根据权利要求1所述的模块化自动驾驶系统,其特征在于,还包括天线模块,用于接收外界的电信号进而控制靶车内部的电子元器件。
4.自动驾驶车辆,其特征在于,所述车辆采用如权利要求1-3中任一项所述的模块化自动驾驶系统。
5.根据权利要求4所述的自动驾驶车辆,其特征在于,所述车辆采用电池包作为车辆的驱动能源。
6.根据权利要求5所述的自动驾驶车辆,其特征在于,所述电池包为磷酸铁锂电池包。
技术总结
本技术涉及靶车技术领域,具体公开了模块化自动驾驶系统以及自动驾驶车辆,包括:包括控制芯片:用于实现靶车内部的电子元器件的整体控制,并接受外界指令发出对应的指令;转向控制模块:用于控制电子转向器,实现靶车的转弯;第一计时器:用于确定转向控制模块的介入时间,转向控制模块的介入之前,靶车均为直线运动;第二计时器:用于确定转向控制模块的工作时间,即靶车转弯时间;转向复位模块:用于控制电子转向器复位,即回归到靶车为直线运动的状态,本装置解决了传统的靶车考核由于路线不统一导致的考核不公平的问题。
技术研发人员:李斌阳,杨才君,郑世泽,黄天发,罗亚辉
受保护的技术使用者:福建泉城特种装备科技有限公司
技术研发日:20240207
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!