一种引入避障功能的USV轨迹跟踪控制方法
本发明涉及无人水面艇控制,具体涉及一种引入避障功能的usv轨迹跟踪控制方法。
背景技术:
1、无人水面艇(unmanned surface vessel,以下简称usv)作为现代海洋科技的重要组成部分,展现出广泛的应用价值。在海洋监测方面,无人艇能够长时间自主执行任务,实时收集海洋环境数据,有助于气候变化研究和海洋生态保护。此外,在海上交通管理中,无人艇具备高效的巡航能力,能够有效监控船舶动态,预防事故发生。在搜救行动中,水面无人艇凭借其灵活机动和快速响应特性,能够迅速到达事故现场,提供及时援助。usv在执行任务时,往往需要沿着预设轨迹或者预设的轨迹点前进,轨迹跟踪的精确性不仅提升了无人艇的作业效率,还增强了其在复杂任务中的可靠性,为未来海洋作业的智能化和自动化发展奠定了坚实基础,因此对usv的轨迹跟踪问题的研究是十分必要的。
2、usv在运动的过程中有可能会遇上水面中的障碍物,这会对usv造成十分大的损失。然而在现有的研究中,usv的轨迹跟踪技术往往被作为一个独立的问题单独研究,很少与避障问题相结合,因此如何实现将usv轨迹跟踪和避障问题相结合显得尤为重要。
技术实现思路
1、为了解决上述背景技术中的不足,本发明提供一种引入避障功能的usv轨迹跟踪控制方法,该方法基于模型预测的控制方法对usv的轨迹跟踪控制方法展开研究,引入避障功能,将usv轨迹跟踪与避障相结合,使得usv航行时能够有效避障,避免与障碍物发生碰撞。
2、本发明第一个目的是提供一种引入避障功能的usv轨迹跟踪控制方法,包括:
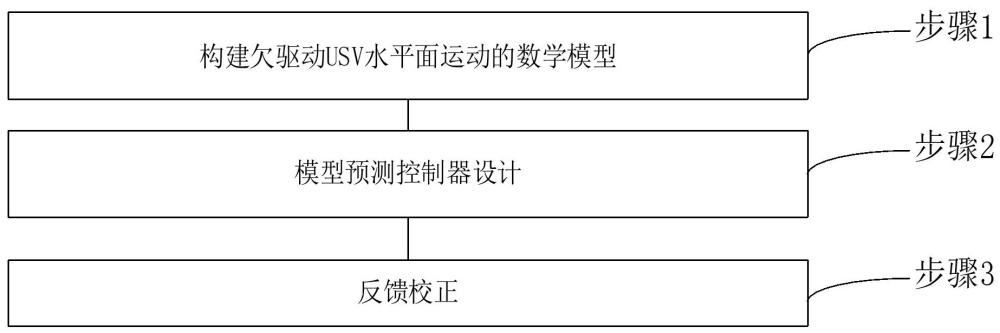
3、构建欠驱动usv在水面运动的数学模型;
4、根据usv水面运动的数学模型获取非线性控制系统模型;
5、根据非线性控制系统模型构建非线性控制系统的预测模型;
6、设定目标点的参考状态,以及障碍物的位置和大小信息;
7、根据usv当前所处的位置以及障碍物的位置定义避障规则;
8、根据预测模型当前的预测状态与参考状态设定预测模型的代价函数;
9、根据当前时刻非线性控制系统模型的输入通过预测模型,基于避障规则,并在预测时域范围内使代价函数最小化时,获取下一时刻的预测状态;其中,预测时域指的是当前时刻与下一时刻之间的时段;
10、根据下一时刻的预测状态控制usv进行航行。
11、优选地,所述避障规则如下:
12、
13、式中,( x( t) ,y( t))为usv在全局坐标系中的位置坐标;( xob( t), yob( t))为障碍物的几何中心位置坐标; la为usv的总长; lsafe为usv与障碍物之间需要保持的安全距离; lob为障碍物的几何中心位置与障碍物边上的最长距离。
14、优选地,获取下一时刻的预测状态时,包括:
15、当前时刻非线性控制系统的输入包括该系统当前的状态,以及根据当前状态获取预测时域范围内的控制序列;其中,控制序列指的是usv在预测时域中每个时间点的控制向量;
16、根据系统当前的状态以及控制序列中的每个控制向量通过预测模型获取每个控制向量对应的预测状态;
17、基于避障规则,根据当前的预测状态和参考状态之间的偏差使得代价函数最小化,获取最小化所对应的控制向量;
18、根据系统当前的状态以及最小化所对应的控制向量通过预测模型获取下一时刻的预测状态。
19、优选地,所述代价函数如下:
20、
21、式中,, τ表示关于时间变量的微分符号;δ t表示预测时域;表示在τ时刻的系统输入;表示预测模型当前的预测状态和参考状态之间的偏差; q和 r分别表示正定对称权重对角矩阵。
22、优选地,构建欠驱动usv水面运动的数学模型,包括usv在水平面上的运动学模型和在水平面上的动力学模型。
23、优选地,所述非线性控制系统模型如下:
24、
25、式中, t0为系统初始时刻; δ( t)为系统输入; λ( t)为系统状态;为系统状态的一阶导数; f()为非线性系统函数模型。
26、优选地,所述非线性控制系统的预测模型如下:
27、
28、式中, λ( k)为系统状态; δ( k)为系统输入; f( )为预测第 k+i时刻的系统输出中的非线性函数; i表示1,2,……, n;表示预测模型输出的预测状态。
29、优选地,获取下一时刻的预测状态之后,还包括:
30、通过检测usv水平面运动模型系统当前的输出,以及下一时刻的预测状态获取预测误差;根据预测误差来校正该系统的预测状态;
31、根据校正后的预测状态控制usv进行航行。
32、本发明至少具有如下有益效果:
33、本发明提供了一种引入避障功能的usv轨迹跟踪控制方法,该方法首先构造欠驱动usv的水平面运动模型;其次基于该模型设计了欠驱动usv的控制方法,并在此基础上引入避障功能,将usv轨迹跟踪与避障相结合,使得usv航行时能够有效避障,避免与障碍物发生碰撞。在预设轨迹遇到障碍物的场景下对本
技术实现要素:
进行了仿真,验证了本发明方法的有效性。
34、本发明设计的usv轨迹跟踪模型预测方法无需构建准确的非线性模型,有效地解决了在求解优化问题的过程中求导困难的问题,只需要过去的输入输出信息和当前系统的状态信息,就能根据下一时刻的输入信息预测下一时刻的输出信息。
35、本发明通过引入避障机制,有效地将usv轨迹跟踪与避障相结合,更符合实际工程的需要。本发明方法与usv实际的运动学和动力学模型相结合,更符合实际意义。
技术特征:
1.一种引入避障功能的usv轨迹跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,所述避障规则如下:
3.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,获取下一时刻的预测状态时,包括:
4.根据权利要求3所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,所述代价函数如下:
5.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,构建欠驱动usv水面运动的数学模型,包括usv在水平面上的运动学模型和在水平面上的动力学模型。
6.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,所述非线性控制系统模型如下:
7.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,所述非线性控制系统的预测模型如下:
8.根据权利要求1所述的引入避障功能的usv轨迹跟踪控制方法,其特征在于,获取下一时刻的预测状态之后,还包括:
技术总结
本发明涉及无人水面艇控制技术领域,具体涉及一种引入避障功能的USV轨迹跟踪控制方法,该方法包括根据USV水面运动的数学模型获取非线性控制系统模型;根据非线性控制系统模型构建非线性控制系统的预测模型;定义避障规则;设定预测模型的代价函数;根据当前时刻非线性控制系统的输入通过预测模型,基于避障规则,并在预测时域范围内使代价函数最小化时,获取下一时刻的预测状态。本发明基于模型预测的控制方法对USV的轨迹跟踪控制方法展开研究,并引入避障功能,即当预设的轨迹遇到障碍物时对本方法提出相应的改进方案。
技术研发人员:刘禄,赵俊,杨静,张晓萌,王艺潞,梁泽栋
受保护的技术使用者:西北工业大学深圳研究院
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!