一种空间谐波减速器多性能参数加速退化试验评估方法
1.本发明属于加速试验技术领域,特别涉及一种空间驱动机构谐波减速器多性能参数加速退化试验评估方法。
背景技术:
2.谐波减速器是影响空间驱动机构性能关键活动零部件,主要由刚轮、柔轮和波发生器组成,依靠中间挠性构件的弹性形变来实现动力传递。其主要原理是通过波发生器的连续转动,柔轮产生连续的弹性变形,使得柔轮与刚轮之间的齿不断地重复“啮入—啮合—啮出—脱开”这一过程,以此来传递啮合运动,达到减速作用。谐波减速器的传动精度指标主要包括传动误差和传动效率,当其中任一传动精度指标低于特定阈值时,谐波减速器即视为失效。
3.由于谐波减速器具有高可靠性、长寿命的特点,其在各类寿命试验中很难发生失效,甚至不会失效,因此人们无法在较短时间内获得其失效寿命数据。此外,由于谐波减速器价格昂贵,一般只进行小批量生产,迫于经费的限制人们无法将大量的产品投入到寿命试验中,这也使得寿命数据难以获得。因此,目前只能采用多性能参数加速退化试验法对其可靠性与寿命进行评估。加速退化试验法是一种在失效机理不变的基础上,通过寻找产品寿命特征与应力之间的关系(加速模型),利用产品在高(加速)应力水平下的性能退化数据去外推或评估正常应力水平下的寿命特征的试验技术和方法。
4.目前的加速性能退化试验建模过程中,由于存在试验样品数较少、有限时间内搜集到的性能退化信息不充分、试验施加的应力类型不全面等小样本问题,带来了较多的认知不确定性问题,导致相应的可靠性与寿命的评价结果可信性较低。针对认知不确定性,有研究采用非精确概率法进行量化,主要有贝叶斯方法、区间分析法和模糊概率论方法等。然而,这些非精确概率方法仍然需要与概率论进行结合,而且还与主观测度有关,导致最终的可靠性评估结果缺乏可信度。北京航空航天大学康锐教授针对不确定随机系统,提出了一种基于机会理论的确信可靠性理论(见文献[1]:wen m,kang r.reliability analysis in uncertain random system.fuzzy optimization and decision making.2016;15:491
‑
506;文献[2]:zhang q,kang r,wen m.belief reliability for uncertain random systems.ieee transactions on fuzzy systems.2018;26:3605
‑
14;文献[3]:zeng z,kang r,wen m,zio e.uncertainty theory as a basis for belief reliability.information sciences.2018;429:26
‑
36.),能够很好的量化系统可靠性问题中同时存在的随机不确定性和认知不确定性。在确信可靠性理论框架下,李晓阳教授对单性能参数加速退化试验的认知不确定性进行了量化,结合不确定过程(uncertain process,又称liu process,即刘过程)建立了加速退化模型并给出参数估计的不确定统计方法(见文献[4]:li x,wu j,liu l,wen m,kang r.modeling accelerated degradation data based on the uncertain process.ieee transactions on fuzzy systems,2019,27(8):1532
‑
1542)。但是,对于在谐波减速器这类具有多个性能参数退化特点的加速退化
试验建模过程中如何考虑认知不确定性的影响研究还未见报道。
技术实现要素:
[0005]
针对谐波减速器的多性能参数加速退化试验中存在的试验样品数量很少和性能检测次数有限所造成的认知不确定性问题,本发明提出了一种空间驱动机构谐波减速器多性能参数加速退化试验评估方法。本发明在确信可靠性理论框架下引入不确定理论的多维不确定过程对多性能参数adt进行建模,并利用正态不确定变量和刘过程对认知不确定性进行量化,最终提出了一种谐波减速器多维不确定过程加速退化模型。本发明的基本原理如图1所示。
[0006]
为实现上述目的,本发明提供了一种空间谐波减速器多性能参数加速退化试验评估方法,包括如下步骤:
[0007]
s1:选择受试样本,并获取每个加速应力下每个受试样本在每个退化检测时刻的性能退化值;
[0008]
s2:对每个性能退化值进行归一化处理,获取归一化后的性能退化数据;
[0009]
s3:基于归一化后的性能退化数据,对加速应力水平下的性能退化过程进行不确定过程建模,构造系统退化方程;
[0010]
s4:对各加速应力下各受试样本的adt数据的累积信度进行不确定性量化,建立归一化后的性能退化数据与信度之间的关系;
[0011]
s5:利用不确定统计分析方法对步骤s3中构造的系统退化方程的所有未知参数进行综合权衡优化;
[0012]
s6:结合各性能参数的阈值,求解对应空间谐波减速器产品的系统裕量方程、不可靠度分布函数以及可靠度的度量方程。
[0013]
进一步,步骤s3具体过程为:
[0014]
令s为归一化应力,根据试验应力类型的不同,加速模型如下:
[0015][0016]
其中,s
q
代表试验中施加的第q个应力水平,s
u
表示正常工作应力水平,s
l
表示试验中施加的最高应力水平;
[0017]
在谐波减速器多性能参数加速退化试验中,各性能参数在归一化应力s下的退化方程x
k
(t|s)的形式为:
[0018][0019]
其中,e
k
(s)是第k个性能参数在归一化应力s下的加速模型,k=1,2,...,k,k为性能参数的数量,a
k
表示与第k个性能参数有关的材料系数,其服从正态不确定分布b
k
是加速模型的另一个参数;β
k
表示第k个性能参数的扩散系数,σ
k
表示时间尺度函数τ(t)的非负参数;c
kt
表示第k个性能参数的多维刘过程,
其服从正态不确定分布,
[0020]
针对k个性能参数,引入多维不确定过程的概念,则系统在归一化应力s下的退化方程为:
[0021]
x(t|s)=[x1(t|s),x2(t|s),...,x
k
(t|s)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0022]
则在归一化应力s下基于多维不确定过程的系统退化方程表示为:
[0023][0024]
在归一化应力s下,式(4)服从如下多元正态不确定分布:
[0025][0026]
其中,x1,x2,...,x
k
分别表示k个性能参数变量。
[0027]
进一步,步骤s4具体过程为:
[0028]
设未知参数矩阵θ=(θ1;θ2;
…
;θ
k
),其中定义第k个性能参数的时间间隔和对应的退化增量如下:
[0029][0030]
其中,表示第k个性能参数的时间间隔,表示第k个性能参数的时间间隔对应的退化增量,表示第k个性能参数归一化后的退化数据:
[0031][0032]
其中,t
i,j,l
表示第i个加速应力水平下第j个受试样本的第l次退化检测时刻,i=1,2,...,n,j=1,2,...,n
i
,l=1,2,...,m
i
,n表示加速应力水平数量,n
i
表示第i个应力水平下的受试样本数量,m
i
表示第i个加速应力水平下每个受试样本的总检测次数;表示第i个加速应力水平s
i
下第j个样本的第k个性能参数的第l次退化检测数据;
[0033]
在不确定理论中,采用信度来描述某个事件发生的可能性,而且不确定变量并没有密度函数的相关定义,信度计算公式如下:
[0034][0035]
其中,是退化增量对应的信度;a和b两者取值不同时得到不同的近似中位秩或平均秩公式。
[0036]
进一步,四种信度计算公式如下:
[0037][0038]
进一步,步骤s5具体过程为:
[0039]
基于步骤s4获得的退化增量和对应的信度采用遗传算法进行系统退化方程的所有未知参数估计,该遗传算法的优化目标为最小化所有性能参数的退化增量所服从的正态不确定分布值与获得第p个信度之差的平方和的总和q
(p)
,如下式所示:
[0040][0041]
其中,p代表采用的是公式(9)中的第p个信度计算公式;q
(p)
代表第p个目标函数值;为参数矩阵,代表第p个参数矩阵的估计结果,
[0042]
其中,q
(p)
表示为θ
(p)
的离散函数,记作θ
(p)
(θ
(p)
),参数矩阵θ的最终估计结果由下式给出:
[0043]
θ
final
=arg minq
(p)
(θ
(p)
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0044]
其中,θ
final
即为参数矩阵θ的最终估计结果;arg min q
(p)
(θ
(p)
)代表当取最小的q
(p)
时所对应的θ
(p)
。
[0045]
进一步,步骤s6具体过程为:
[0046]
考虑性能参数退化量属于非减情况且第k个性能参数的性能阈值为w
k
时,得到第k个性能参数的裕量方程:
[0047][0048]
其中,m
k
(t|s)是第k个性能参数的裕量,
[0049]
在给定归一化应力s和时间t时,第k个性能参数的裕量m
k
(t|s)服从如下正态不确定分布:
[0050][0051]
其中,m
k
表示第k个性能参数裕量分布函数的自变量的取值,为任意实数。
[0052]
系统多个性能参数的裕量方程矩阵为:
[0053][0054]
对于多个性能参数裕量分布函数的自变量对应的任意实数m1,m2,...,m
k
,系统多个性能参数的裕量方程矩阵(14)服从如下多元不确定分布:
[0055][0056]
定义给出产品性能退化过程首次穿越失效阈值时间所服从的不确定分布,即首穿时分布γ
k
(t|s):
[0057][0058]
其中,表示测度,t
c
表示性能参数退化过程首次穿越失效阈值的时刻,表示裕量为零时刻的分布,
[0059]
根据可靠性科学原理中的裕量可靠原理,得到第k个性能参数可靠度的度量方程为:
[0060][0061]
根据竞争失效假设,即当任一性能参数的裕量小于零时,系统即发生失效;根据不确定理论中的独立情形下的多个事件交集测度取小原则,系统可靠度的度量方程表述为:
[0062][0063]
本发明的有益效果:
[0064]
1)本发明解决了多性能参数adt中的由试样数量或检测时间次数有限时导致的认知不确定性和各性能参数之间的相依性问题;
[0065]
2)本发明引入不确定理论中的多维不确定过程对多性能参数adt进行建模,提出了一种多维不确定过程退化模型,填补了目前针对多性能参数adt建模中认知不确定性量化的空白;
[0066]
3)本发明引入不确定理论中的不确定统计分析方法可以对所提模型的所有未知参数进行综合权衡优化。
附图说明
[0067]
图1为本发明的基于不确定过程的加速退化建模评估方法原理图;
[0068]
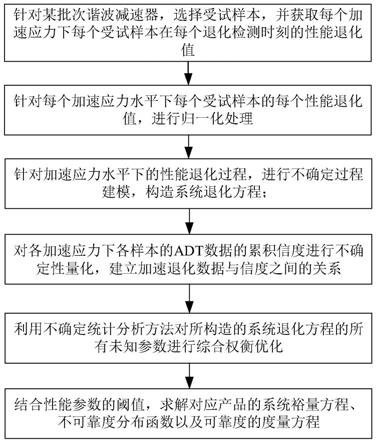
图2为本发明实施例的空间谐波减速器多性能参数加速退化试验评估方法流程图;
[0069]
图3是本发明实施例中传动效率的加速退化数据;
[0070]
图4是本发明实施例中传动误差的加速退化数据;
[0071]
图5是本发明使用的遗传算法流程图;
[0072]
图6是本发明实施例中四种信度公式下的全局参数寻优的迭代变化图;
[0073]
图7是本发明实施例中两个性能参数在温度作用下随时间的退化规律;
[0074]
图8是本发明实施例中两个性能参数的不确定性量化(退化轨迹上下界(55℃));
[0075]
图9是本发明实施例中基于多维不确定过程的系统的确信可靠度。
具体实施方式
[0076]
如图2所示,本实施例提出的空间驱动机构谐波减速器多性能参数加速退化试验评估方法,包括如下步骤:
[0077]
s1:针对某批次谐波减速器,选择受试样本,并获取每个加速应力下每个受试样本在每个退化检测时刻的性能退化值;
[0078]
每个受试样本的性能退化数据为:
[0079][0080]
其中,t
i,j,l
表示第i个加速应力水平下第j个受试样本的第l次退化检测时刻(两个性能参数在同一时刻进行检测),i=1,2,...,n,j=1,2,...,n
i
,l=1,2,...,m
i
,n表示加速应力水平数量,n
i
表示第i个应力水平下的受试样本数量,m
i
表示第i个加速应力水平下每个受试样本的总检测次数;表示第i个加速应力水平s
i
下第j个样本的第k个性能参数的第l次退化检测数据,本实施例中,k=1,2,分别为谐波减速器的传动效率和传动误差两个性能参数。
[0081]
受试样本总体的性能退化数据为:
[0082][0083]
s2:针对每个加速应力水平下每个受试样本的每个性能退化值,进行归一化处理;
[0084]
为了消除各性能参数退化量单位量级不同造成的差异性,将传动效率和传动误差的原始退化数据进行归一化,其中传动效率的归一化公式为:
[0085][0086]
其中,表示传动效率归一化后的退化数据,表示传动效率原始退化数据,表示初始时刻传动效率的测量值。
[0087]
同理,传动误差的归一化公式为:
[0088][0089]
其中,表示传动误差归一化后的退化数据,表示传动误差原始退化数据,表示初始时刻传动误差的测量值。
[0090]
s3:针对加速应力水平下的性能退化过程,进行不确定过程建模,构造系统退化方程;
[0091]
首先对应力进行归一化处理。令s为归一化应力,根据试验应力类型的不同,具体的加速模型也不同,具体如下:
[0092][0093]
其中,s
q
代表试验中施加的第q个应力水平,s
u
表示正常工作应力水平,s
l
表示试验中可以施加的最高应力水平。本发明中所用的应力变量为加速退化试验中的协变量,因此应力变量的取值范围[s
u
,s
l
]应该是保证失效机理不变时的范围。
[0094]
在谐波减速器多性能参数加速退化试验中,各性能参数在归一化应力s下的退化方程x
k
(t|s)的形式为:
[0095][0096]
其中,e
k
(s)是第k个性能参数在归一化应力s下的退化速率公式,即加速模型,k=1表示传动效率(tef),k=2表示传动误差(ter);a
k
表示与第k个性能参数有关的材料系数,与产品内部属性息息相关,因此假设其服从正态不确定分布b
k
则是加速模型的另一个参数;β
k
表示第k个性能参数的扩散系数,σ
k
表示时间尺度函数τ(t)的非负参数;c
1t
,c
2t
表示2个相互独立的多维刘过程,
[0097]
针对传动效率和传动误差两个性能参数,引入多维不确定过程的概念,则系统在归一化应力s下的退化方程可表示为:
[0098]
x(t|s)=[x1(t|s),x2(t|s)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0099]
因此,在归一化应力s下基于多维不确定过程的系统退化方程可表示为:
[0100][0101]
在归一化应力s下,式(8)服从如下多元正态不确定分布:
[0102][0103]
其中,x1、x2分别表示传动效率和传动误差两个性能参数变量。
[0104]
s4:对各加速应力下各样本的adt数据的累积信度进行不确定性量化,建立加速退化数据与信度之间的关系;
[0105]
设未知参数矩阵为θ=(θ1;θ2),其中
[0106]
接着定义如下第k个性能参数的时间间隔和对应的退化增量:
[0107][0108]
其中,表示第k个性能参数的时间间隔,表示第k个性能参数的时间间隔对应的退化增量。
[0109]
在不确定理论中,通常采用信度而不是概率来描述某个事件发生的可能性,而且不确定变量并没有密度函数的相关定义。因此本发明采用构建加速退化数据和信度之间的关系的方法。目前常采用的几种信度计算公式可以统一由如下公式表示:
[0110][0111]
其中,是退化增量对应的信度;a和b两者取值不同时可得到不同的近似中位秩或平均秩公式。下面是四种最常见的信度计算公式:
[0112][0113]
s5:利用不确定统计分析方法对步骤s3中构造的系统退化方程的所有未知参数进行综合权衡优化;
[0114]
基于步骤s4获得的退化增量和对应的信度采用遗传算法进行参数估计。该算法的优化目标为最小化所有性能参数的退化增量所服从的正态不确定分布值与获得第p个信度之差的平方和的总和q
(p)
,如下式所示:
[0115][0116]
其中,p代表采用的是公式(12)中的第p个信度计算公式;q
(p)
代表第p个目标函数值;为参数矩阵,代表第p个参数矩阵的估计结果。
[0117]
根据公式(13)可知,q
(p)
可表示为θ
(p)
的离散函数,记作q
(p)
(θ
(p)
)。然后参数矩阵θ的最终估计结果可由下式给出:
[0118]
θ
final
=arg min q
(p)
(θ
(p)
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0119]
其中,θ
final
即为参数矩阵θ的最终估计结果;arg min q
(p)
(θ
(p)
)代表当取最小的q
(p)
时所对应的θ
(p)
。
[0120]
s6:结合性能参数的阈值,求解对应产品的系统裕量方程、不可靠度分布函数以及可靠度的度量方程;
[0121]
考虑性能参数退化量属于非减情况且第k个性能参数的性能阈值为w
k
时,可以得到性能参数的裕量方程:
[0122][0123]
其中,m
k
(t|s)是第k个性能参数的裕量,其一个具有独立增量的不确定过程。
[0124]
在给定归一化应力s和时间t时,第k个性能参数的裕量m
k
(t|s)服从如下正态不确定分布:
[0125][0126]
其中,m
k
表示第k个性能参数裕量分布函数的自变量的取值,可以为任意实数。
[0127]
在此基础上,可得到系统传动效率和传动误差两个性能参数的裕量方程矩阵:
[0128][0129]
对于两个性能参数裕量分布函数的自变量对应的任意实数m1,m2,系统的裕量方程矩阵(17)则服从如下多元不确定分布:
[0130][0131]
为了量化产品存活的不确定测度,需要给出产品性能退化过程首次穿越失效阈值时间所服从的不确定分布,即首穿时分布γ(t|s)。
[0132][0133]
其中,表示测度,t
c
表示性能参数退化过程首次穿越失效阈值的时刻,表示裕量为零时刻的分布。
[0134]
由于性能裕量函数是在不确定理论框架下的不确定分布函数,因此,可靠度r(t|s)应该表示为性能裕量函数大于零的不确定测度。根据可靠性科学原理中的裕量可靠原理,可以得到第k个性能参数可靠度的度量方程为:
[0135][0136]
根据竞争失效假设,即当任一性能参数的裕量小于零时,系统即发生失效。当且仅
当所有性能参数裕量大于零时,系统才可靠。则系统可靠度的度量方程可表述为:
[0137][0138]
可靠度r(t|s)表示产品在t时刻存活的不确定测度;将未知的参数矩阵θ的估计值及归一化后的初始应力值s0代入式(21),得到正常使用条件下产品的确信可靠度曲线。
[0139]
下面结合附图和实施例进一步描述本发明,应该理解,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0140]
采用谐波减速器案例对本发明提出的考虑多维不确定过程的确信可靠性模型的有效性进行分析讨论。本实施例中,在各个加速应力水平下的试验样品数均为3,因此初步判断为样品数量有限,在样品维度存在一定的认知不确定性。而在各加速应力下的性能检测次数也在逐渐减少,分别为247,174,155和114,在时间维度可能存在一定的认知不确定性。因此可以采用本发明上述系统可靠度的度量方程(21)对样品维度和时间维度的认知不确定性进行量化分析。
[0141]
步骤一、数据收集及预处理;
[0142]
利用式(3)和(4)对传动效率和传动误差的原始退化数据进行归一化,归一化后的传动误差和传动效率的加速退化数据分别如图3和图4所示。
[0143]
步骤二、针对加速应力水平下的性能退化过程,进行不确定过程建模,构造系统退化方程;
[0144]
由于本实施例中应力类型为温度,因此选择式(5)中的阿伦尼斯公式对应力进行归一化应力计算。为此,还需要知道谐波减速器的工作应力水平的上限和下限。根据产品前期开展的可靠性强化试验,确定谐波减速器的高温工作极限为90℃。最后应力归一化计算结果如下表1所示。
[0145]
表1 谐波减速器的归一化应力水平
[0146]
应力水平(℃)15255570808590归一化应力水平00.16240.59020.77610.89120.94641
[0147]
为了获得谐波减速器包括退化、裕量和度量方程在内的确信可靠性模型,首先根据前文中的不确定统计分析方法和加速退化试验基本信息,进行模型未知参数估计。具体如下:
[0148]
1.建立归一化后的性能退化数据与信度之间的关系
[0149]
首先,根据试验获得传动效率和传动误差两个性能参数的加速退化数据计算其退化增量,并将每个应力下所有试验样品在相同的时间间隔内的退化增量按增序排列。
[0150]
然后,根据式(12)计算每个退化增量的信度。比如在55℃下,在360h
‑
480h检测时间间隔内,得到的三个试验样品的传动效率的退化增量及其信度如下表2所示。
[0151]
表2 传动效率的退化增量及其信度举例
[0152][0153]
2.估计系统退化方程的未知参数
[0154]
采用遗传算法进行参数估计,具体流程如图5所示。根据上一步骤得到的两个性能参数的退化增量及其对应信度,结合式(9)和式(13),可得到基于不同信度计算公式下的模型未知参数的估计结果和对应的目标函数值,如下表3所示,四种信度公式下的全局参数寻优的迭代变化如图6所示。
[0155]
表3 参数估计
[0156][0157]
然后根据式(14)可知,最终参数估计结果为θ
final
=θ2,如下表4所示。
[0158]
表4 θ的最终估计结果
[0159][0160]
根据表4和式(5),可得到谐波减速器两个性能参数的退化方程分别为:
[0161][0162][0163]
上述公式的自变量为时间t和温度应力s,其取值范围分别是[0,∞]和[15℃,90℃]。因此,谐波减速器的两个性能参数在温度作用下随时间的退化规律为:
[0164][0165]
结果如图7所示。
[0166]
步骤三、根据首穿时分布,给出确信可靠度评估结果;
[0167]
在式(22)和(23)中,两个性能参数的样品和时间维度的认知不确定性分别体现如下:
[0168]
1)两个性能参数的样品维度认知不确定性分别由a1×
e
4.8707s
×
t
0.5031
和a2×
e
4.8790s
×
t
0.4943
表征,其中a1~n
u
(5.262
×
10
‑3,0.2048),a2~n
u
(3.322
×
10
‑3,0.3441)。
[0169]
2)两个性能参数的时间维度认知不确定性分别由0.6193
×
c
1t
和0.4205
×
c
2t
表征,其中c
1t
~n
u
(0,t
0.5031
),c
2t
~n
u
(0,t
0.4943
)。
[0170]
上述不确定性的量化可以利用不确定仿真方法得到的退化上下界来表示。本实施例以55℃为例,根据该方法可得到500条谐波减速器的退化轨迹,并且去掉5个最大值和5个最小值后以排除异常值的影响,从而得到谐波减速器两个性能参数的退化轨迹上下界,结果如图8所示。
[0171]
当给定谐波减速器的失效阈值时,可得其裕量方程。设谐波减速器两个性能参数的失效阈值分别为初始退化量的145%和190%。然后,根据
[0172]
表和公式(15),即可得到谐波减速器两个性能参数的裕量方程分别为:
[0173][0174][0175]
在此基础上,当给定谐波减速器的工作温度时,还可得其度量方程。若假设谐波减速器的工作温度为25℃,根据公式(20)、(25)和(26),可得到谐波减速器两个性能参数的度量方程分别为:
[0176][0177][0178]
因此,根据公式(21),即可得到谐波减速器两个性能参数和系统级的确信可靠度
曲线,如图9所示。
[0179]
对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以对本发明的实施例做出若干变型和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1