一种快速建立手伸及界面的参数化方法与流程
本发明属于汽车技术领域,具体的是一种快速建立手伸及界面的参数化方法。
背景技术:
目前大部分的汽车设计公司和制造厂都是用catia进行设计,而人机工程所用的手伸及界面都是由一些软件进行生成,且生成的手伸及界面需要转换格式才可以在catia软件中打开,较为繁琐,同时在汽车开发前期,设计硬点会进行不断的调整和更新,每次的调整更新,都需要在其它软件中重新制作手伸及界面然后再转化为catia可识别的格式,无法做到实时更新,且效率偏低。
技术实现要素:
本发明提供了一种快速建立手伸及界面的参数化方法用以解决上述背景技术中提出的技术问题。
本发明解决上述技术问题采用的技术方案为:
一种快速建立手伸及界面的参数化方法,基于catia软件中的知识工程模块,将手伸及界面相关的设计硬点作为输入,将手伸及界面的相关基础数据做成设计表,通过将手伸及界面相关的制作过程进行参数化关联设置,最终实现在catia中通过几个硬点参数的输入即可生成对应的手伸及界面,具体包括如下几个步骤:
在catia中新建3个参数,分别命名为h30、h17、l53,并根据设计硬点的设计对h30、h17和l53进行赋值;
在catia中新建1个参数,命名为g,利用公式a计算出g值,在catia中利用规则的命令对参数g和参数h30及h17进行关联设置,
公式a:g=0.00327*h30+0.00285*h17-3.2;
在catia中新建一个参数,命名为hr,利用公式b计算出hr值,在catia中利用规则的命令对参数hr和参数g进行关联设置,
公式b:hr=786-99*g;
计算(hr-l53)值,根据(hr-l53)值,判断手伸及界面基准平面位置;
根据g值,判断手伸及界面的基础参数范围;
根据基础参数范围,引用手伸及界面参数表,建立相对于基准平面的手伸及界面坐标点;
用线条连接手伸及界面坐标点;
对样条线进行桥接,最终生成手伸及界面。
进一步地,若(hr-l53)<0,则手伸及界面基准平面在加速踏板踵点ahp+hr点处,若(hr-l53)>0值,则手伸及界面基准平面在后座椅r点处。
进一步地,将saej1517的参数转化到参数表中,利用catia软件中设计表命令将软件中点和表格参数进行关联设置,设置后坐标点(x、y、z值)即在正确位置。
进一步地,利用catia中的样条线命令对每个y值相同的点进行连接,最后将各相邻的样条线进行桥接,得到最终的手伸及界面。
与现有技术相比,本发明的有益效果为:
可以直接在catia软件中快速生成手伸及界面,省去了传统的手伸及界面需要转换格式后方可在catia软件中打开的步骤,方便快捷;在软件中实现了参数化设计,可以随着汽车设计硬点的调整实时更新,大大提高工作效率;在前期设计开发过程中,可以快速评判相关创意或方案的可行性,降低开发周期和方案的反复性。
附图说明
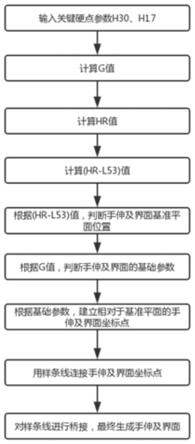
图1为手伸及界面参数化流程图;
图2为手伸及界面参数化示意图;
图3为手伸及界面参数表;
图4为手伸及界面的点线桥接示意图;
图中,1、驾驶员外侧,2、驾驶员内侧,3、手伸及界面,4、基准平面位置,5、后座椅r点,6、加速踏板踵点ahp点。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常连接的含义相同,本文中在本发明的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
实施例,请参照附图1-4,一种快速建立手伸及界面的参数化方法,包括如下几个步骤:
在catia中新建3个参数,分别命名为h30、h17、l53,并根据设计硬点的设计对h30、h17和l53进行赋值;
在catia中新建1个参数,命名为g,利用公式a计算出g值,在catia中利用规则的命令对参数g和参数h30及h17进行关联设置在catia中利用规则的命令对参数g和参数h30及h17进行关联设置,
公式a:g=0.00327*h30+0.00285*h17-3.2;
在catia中新建一个参数,命名为hr,利用公式b计算出hr值,在catia中利用规则的命令对参数hr和参数g进行关联设置,
公式b:hr=786-99*g;
计算(hr-l53)值,根据(hr-l53)值,判断手伸及界面基准平面位置,若(hr-l53)<0,则手伸及界面基准平面在加速踏板踵点ahp+hr点处,若(hr-l53)>0值,则手伸及界面基准平面在后座椅r点处(如图4所示,5表示后座椅r点处、6表示加速踏板踵点ahp点处);
根据g值,判断手伸及界面的基础参数范围;
根据基础参数范围,引用手伸及界面参数表,建立相对于基准平面的手伸及界面坐标点(x、y、z值);
用线条连接手伸及界面坐标点;
对样条线进行桥接,最终生成手伸及界面(如图2所示,1表示驾驶员外侧、2表示驾驶员内侧、3表示手伸及界面、4表示基准平面位置)。
需要说明的是,将saej1517的参数转化到参数表中,利用catia软件中设计表命令将软件中点和表格参数进行关联设置,设置后坐标点(x、y、z值)即在正确位。
需要说明的是,利用catia中的样条线命令对每个y值相同的点进行连接,最后将各相邻的样条线进行桥接,得到最终的手伸及界面。
本发明的优点为:由其它软件生成的手伸及界面需要转换格式才可以在catia软件中打开,较为繁琐,同时在汽车开发前期,设计硬点会进行不断的调整和更新,每次的调整更新,都需要在其它软件中重新制作手伸及界面然后再转化为catia可识别的格式,无法做到实时更新,且效率偏低。本发明提供了一种快速建立手伸及界面的参数化方法,可以直接在catia软件中快速生成手伸及界面,并且可以随着汽车设计硬点的调整实时更新,大大提高工作效率。
技术特征:
1.一种快速建立手伸及界面的参数化方法,其特征在于,包括如下几个步骤:
在catia中新建3个参数,分别命名为h30、h17、l53,并根据设计硬点的设计对h30、h17和l53进行赋值;
在catia中新建1个参数,命名为g,利用公式a计算出g值,在catia中利用规则的命令对参数g和参数h30及h17进行关联设置,
公式a:g=0.00327*h30+0.00285*h17-3.2;
在catia中新建一个参数,命名为hr,利用公式b计算出hr值,在catia中利用规则的命令对参数hr和参数g进行关联设置,
公式b:hr=786-99*g;
计算(hr-l53)值,根据(hr-l53)值,判断手伸及界面基准平面位置;
根据g值,判断手伸及界面的基础参数范围;
根据基础参数范围,引用手伸及界面参数表,建立相对于基准平面的手伸及界面坐标点;
用线条连接手伸及界面坐标点;
对样条线进行桥接,最终生成手伸及界面。
2.根据权利要求1所述的一种快速建立手伸及界面的参数化方法,其特征在于,若(hr-l53)<0,则手伸及界面基准平面在加速踏板踵点ahp+hr点处,若(hr-l53)>0值,则手伸及界面基准平面在后座椅r点处。
3.根据权利要求1所述的一种快速建立手伸及界面的参数化方法,其特征在于,将saej1517的参数转化到参数表中,利用catia软件中设计表命令将软件中点和表格参数进行关联设置,设置后坐标点x、y、z值即在正确位置。
4.根据权利要求1所述的一种快速建立手伸及界面的参数化方法,其特征在于,利用catia中的样条线命令对每个y值相同的点进行连接,最后将各相邻的样条线进行桥接,得到最终的手伸及界面。
技术总结
本发明提供了一种快速建立手伸及界面的参数化方法,基于CATIA软件中的知识工程模块,将手伸及界面相关的设计硬点作为输入,将手伸及界面的相关基础数据做成参数表,通过将手伸及界面相关的制作过程进行参数化关联设置,最终实现在CATIA软件中通过几个硬点参数的输入即可生成对应的手伸及界面,并且可以随着汽车设计硬点的调整而实时更新,提高工作效率。
技术研发人员:姚兰杰
受保护的技术使用者:的卢技术有限公司
技术研发日:2021.02.24
技术公布日:2021.06.22
- 还没有人留言评论。精彩留言会获得点赞!