障碍物预警方法与流程
本发明涉及一种对障碍物进行预警的方法,尤其涉及一种利用图像的对比度比对能进行障碍物位置探测的障碍物预警方法。
背景技术:
1、现有在行驶面上进行自主行驶的系统中,用传感器等检测障碍物,对动作进行控制。例如,在汽车等车辆中,作为辅助驾驶员的系统,已开发了辅助避免与障碍物接触的车辆的避免接触辅助装置(如专利文献:特开平2008-49932号公报)。另外,已提出了使移动机器人向通过遥控操作指示的方向移动,基于由传感器检测出的与障碍物之间的距离算出移动速度,从而防止与障碍物接触的方法(如专利文献:特开平2006-285548号公报)。同时,随着技术的不断进步,最近,作为有力的手段而采用如下计测技术:利用搭载于汽车的相机等对车外的对象风景进行拍摄,对该拍摄的图像进行图像处理,求出从汽车到对象物的距离(如,专利文献:特开平5-114099号公报)。该基于图像的距离计测技术大体分为如下技术:根据单眼可视图像,使用与相机位置的关系推定到对象物的距离的技术;以及根据利用多个相机拍摄的多个图像,使用三角测量的原理求出到对象物的距离的技术;中,根据多个图像使用三角测量的原理求出距离的计测技术根据左右图像中的相同物体的位置的相对偏移求出距离,所以能求出准确的距离。
2、上述这些现有的障碍物探测方法都需要借助智能计算机的计算才能完成,基于此本申请的发明人通过大量的对现有技术的了解,提出了创新性的仅通过图像对比度的对比理即可提示出障碍物是否在安全距离内的障碍物预警方法。
3、因此,亟需一种与以往不同的障碍物预警方法。
技术实现思路
1、本发明的目的在于提供一种通过图片对比度的比对即得知障碍物位置的障碍物预警方法。
2、本发明提供的障碍物预警方法,包括如下步骤:
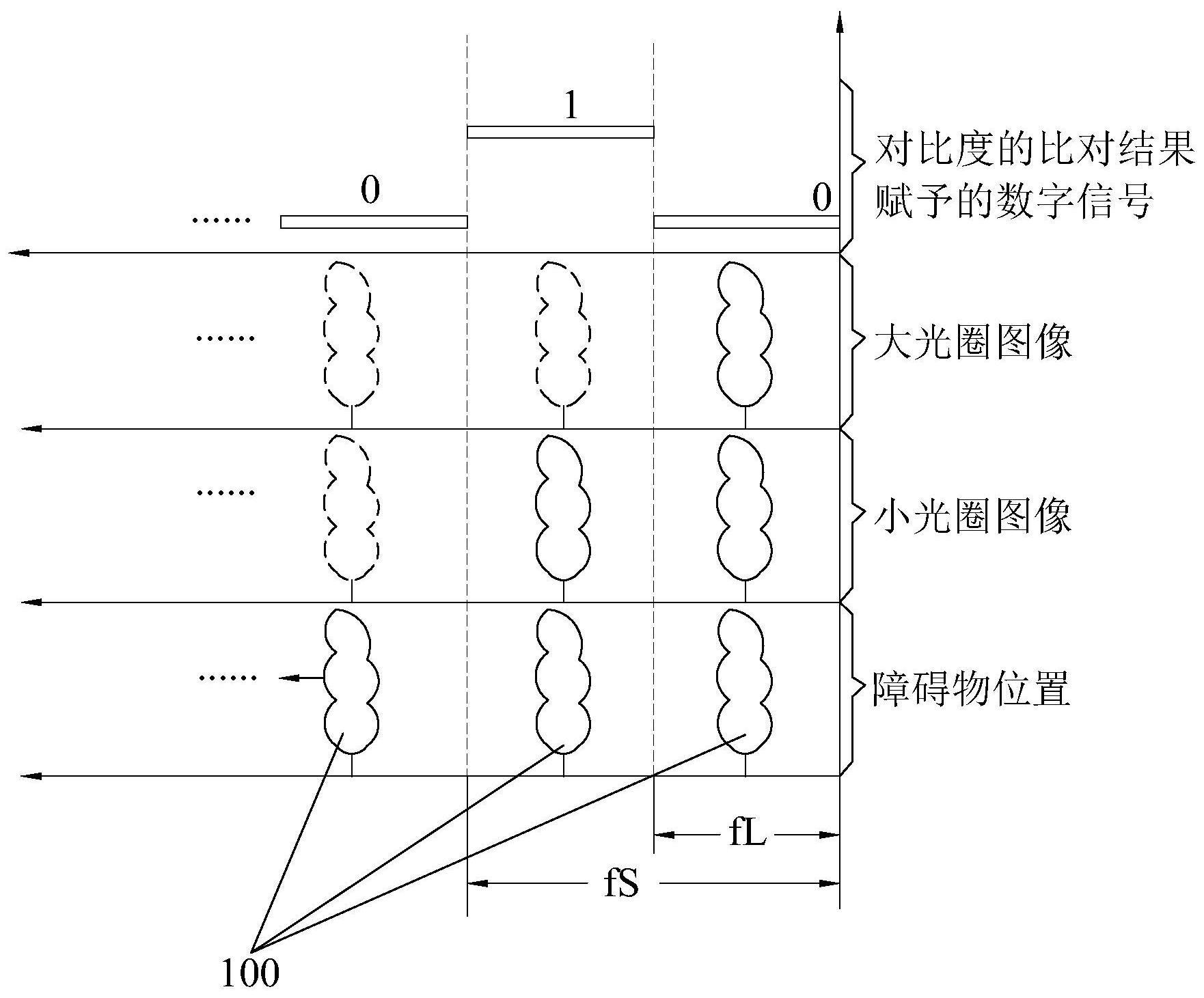
3、提供一具有第一物镜系统及第二物镜系统的摄影装置,所述第一物镜系统具有小景深fl,所述第二物镜系统具有大景深fs,于同一障碍物所述小景深fl 的范围位于所述大景深fs的范围内;
4、对同一障碍物同一位置及同一时间获取,在第一物镜系统下形成的大光圈图像,在第二物镜系统下形成的小光圈图像;
5、障碍物于小景深fl范围内大光圈图像呈清晰状;障碍物于大景深fs范围内小光圈图像呈清晰状;障碍物除上述情况之外大光圈图像及小光圈图像均呈模糊状;
6、对同时获取的小光圈图像和大光圈图像的对比度进行对比,均为清晰状的小光圈图像和大光圈图像的对比度对比结果赋予数字信号“0”,清晰状的小光圈图像和模糊状的大光圈图像的对比度对比结果赋予数字信号“1”,均为模糊状的小光圈图像和大光圈图像的对比度对比结果赋予数字信号“0”;及
7、接收数字信号,对连续两次数字信号的变化为“0”“0”的发出安全指示,对连续两次数字信号的变化为“0”“1”的发出预警指示,对连续两次数字信号的变化为“1”“0”的发出紧急指示。
8、与现有技术相比,障碍物的光学影像通过第一物镜系统形成大光圈图像,障碍物的光学影像通过第二物镜系统形成小光圈图像,通过对障碍物同一位置同一时间同时获取的大光圈图像和小光圈图像的对比度进行对比并对对比结果赋予数字信号,并依据连续两次数字信号的变化对应的发出安全指示、预警指示或紧急指示三种指示中的一种指示,进而获取障碍物是否在安全距离外的提示。由上可知,本发明不需要借助智能计算机的复杂计算,仅通过大光圈图像和小光圈图像的对比度的比对即可提示出障碍物是否在安全距离外的提示,获取大光圈图像和小光圈图像仅通过光学器件即可完成,故,本发明的障碍物预警方法具有与以往不同的障碍物探测方式,实用性强,适于广泛推广使用。
9、较佳地,所述第一物镜系统的光圈口径大于所述第二物镜系统的光圈口径。
技术特征:
1.一种障碍物预警方法,其特征在于,包括如下步骤:
2.如权利要求1所述的障碍物预警方法,其特征在于,所述第一物镜系统的光圈口径大于所述第二物镜系统的光圈口径。
技术总结
本发明公开一种障碍物预警方法其包括如下步骤,提供具有第一物镜系统及第二物镜系统的摄影装置,第一物镜系统具有小景深fL,第二物镜系统具有大景深fS,在第一物镜系统下形成大光圈图像,在第二物镜系统下形成的光圈图像;障碍物于小景深fL范围内大光圈图像呈清晰状;障碍物于大景深fS范围内小光圈图像呈清晰状;障碍物除上述情况之外大光圈图像及小光圈图像均呈模糊状;对同时获取的小光圈图像和大光圈图像的对比度进行对比并形成数字信号“0”或“1”;对连续两次数字信号的变化发出安全指示或预警指示或紧急指示。本发明仅通过大光圈图像和小光圈图像的对比度的比对即可提示出障碍物是否在安全距离外的提示,实用性强,适于广泛推广使用。
技术研发人员:范继良
受保护的技术使用者:黄剑鸣
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!