一种水声试验水池中三维矢量参数传递函数测量方法与流程
1.本发明涉及水声测量领域,属于水下声场中矢量参数测量方向,尤其涉及一种水声试验水池中三维矢量参数传递函数测量方法。
背景技术:
2.随着水声技术的不断发展,水下矢量参数的测量一直以来都是水声领域研究的重点方向之一。通常,矢量信息包含有声压梯度、质点振速和质点加速度等矢量信息。相对于水下标量信息而言,矢量信息是具有方向性的,能够表示水中矢量参数的方向性信息,并且能与标量参数一同进行混合信号处理,广泛应用于水下定位和水下噪声测量等领域。
3.矢量传感器通常工作在远离声源的远场条件下。为了准确得到矢量传感器在实际工作条件下的性能,需要在自由场条件下进行测量。实验室条件下的试验水池通常可以近似为自由场声场。但是,由于试验水池的空间有限,在试验水池的边界,声波会发生反射,反射波会与原来直达声发生干涉,破坏原来的自由场声场环境。为了消除反射声对矢量传感器测量产生的影响,需要对有限水域中的矢量场进行分析,消除边界反射对矢量声场的影响。在矢量声场中,由于矢量参数带有方向性,在进行直达波和反射波的分析时,直达声波和反射声波的关系不能够简单的相加,这就导致有了反射波后,有限水域的矢量声场变得更为复杂,无法进行矢量传感器的测量工作。
4.本发明根据矢量声场的特性,对试验水池有限水域中的矢量声场进行了分析,建立了试验水池矢量声场条件下的系统频率响应模型。通过对该模型空间响应关系的分析,设计了矢量声场多重空间窗函数滤波器,并利用空间滤波器的方法在三维方向上消除了试验水池边界反射波对矢量声场中参数所产生的影响,得到了自由场条件下的三维矢量传递函数。该方法可应用于有限水域中矢量参数分布的计算和矢量传感器水声参数的测量等。
技术实现要素:
5.本发明针对现有技术中的缺点,提供了一种水声试验水池中三维矢量参数传递函数测量方法。
6.为了解决上述技术问题,本发明通过下述技术方案得以解决:一种水声试验水池中三维矢量参数传递函数测量方法,包括以下步骤:步骤一:根据水下声场中矢量参数带有方向性的特征,对水下矢量参数在自由场中沿轴向方向进行三维正交分解,并根据水下声场传播特性和声场边界特性条件,得到水下声场中的矢量参数三维正交分解分量;步骤二:建立水下三维矢量声场传递函数模型,在三维坐标方向上将水下声场中的矢量参数与参考矢量参数相除,得出混响条件下水中声场的三维矢量传递函数;步骤三:对矢量传递函数进行空间滤波处理,消除不同方向矢量参数对自由场传递函数的影响,得到自由场声场条件下矢量参数传递函数。
7.作为优选,步骤一的具体步骤如下:将在自由场的矢量参数定义为将 其进行
三维正交分解并形成p
gx
、p
gy
和p
gz
;矢量参数在水域内会产生反射,得出 第i次反射的反射矢量参数的正交分解分量为p
igx
、p
igy
和p
igz
;矢量参数在水域 内会产生反射,假设第i次反射的反射矢量参数的正交分解分量为p
igx
、p
igy
和p
igz
。 在声场中,p
gx
、p
gy
和p
gz
分别与p
igx
、p
igy
和p
igz
干涉叠加,得到矢量参数在水下总 声场的三维正交分解分量p
′
gx
、p
′
gy
和p
′
gz
;通过p
′
gx
、p
′
gy
和p
′
gz
合成得到水下总声场 中的矢量参数
8.作为优选,在步骤二中,通过得出直达声波数与反射波波数具有相同的幅度和/或通过定义系数,将传递函数进一步简化。
9.作为优选,水下矢量声场的矢量参数包括水声声压梯度、质点振速、质点加速度。
10.当步骤一中的矢量参数是水声声压梯度时,步骤一的具体步骤如下:1)在球面波自由场中,首先将声源抽象为点源,在远场条件下,球面波的声压梯度可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式(1)中,为水声声压梯度,该参数为矢量参数;j为复数单位,;为波数矢量, ,ω为角频率,为声速矢量;r为距离点源的距离,t为时间,p0为距离声源1m处的声压常数;2)水声声压梯度为矢量参数,其带有方向性,采用正交分析的方法,在接收点处将声压梯度沿着正交坐标轴进行分解,分别求解其在x、y和z三个方向的声压梯度分量,如式(2)所示:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式(2)中,pgx为水声声压梯度沿x轴方向的分量;pgy为水声声压梯度沿y轴方向的分量;pgz为水声声压梯度沿z轴方向的分量。θ为声压梯度方向在xoy坐标轴与x轴的夹角,j为声压梯度方向与坐标轴z轴的夹角;3)声波在有限水域内会产生反射波,由于水声声压梯度的是矢量参数,反射声波的水声声压梯度与反射波的声程和角度有关,反射声波的水声声压梯度可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
式(4)中,pigx为第i次反射声波沿x轴方向的水声声压梯度分量;pigy为第i次反射声波沿y轴方向的水声声压梯度分量;pigz为第i次反射声波沿z轴方向的水声声压梯度分量,mi为第i次反射波的吸声系数;为第i次反射波的波数;ji为第i次反射波与z轴的夹角;θi为第i次反射波在xoy坐标轴上与x轴的夹角;4)通过式(2)和式(4)得出水下声场中距离声源距离为r处的声压梯度表示为:
ꢀꢀ
(5)为水下声场中距离声源距离为r处合成的水声声压梯度,且满足:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)式(1)和式(2)满足式(3),式(3)为。
11.步骤二中的具体步骤如下:水下声场中的声压梯度传递函数可表示为距离声源距离为r处的声压梯度与距离声源r处直达声相除,如式(7)所示:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)通过公式(2)至式(7)得到自由场条件下x、y和z方向的传递函数;当和时,则直达声沿某一个三维坐标方向的矢量分量为0,沿此方向全部为反射波分量,在分析时可以全部忽略,不需要进行矢量空间滤波。
12.当并且时,有:
ꢀꢀꢀꢀꢀꢀꢀ
(8)作为优选,在水下声场中,直达声波数与反射波波数具有相同的幅度,此时对
上式进行进一步化简,可得:
ꢀꢀꢀꢀ
(9)式(9)中,定义系数,和,令,,;,,,进一步化简,可得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)。
13.作为优选,从式(10)中可以看出,在完全的自由场中,矢量参数的传递函数通常为1。然而在水声试验水池中,由于受到了来自有限边界反射声波的影响,三维矢量参数的传递函数发生了变化。为了得到自由场条件下三维矢量参数的传递函数,需要消除试验水池有限水域对水下三维矢量参数产生的影响。从式(10)中可以看出,有限水域的反射波的影响与投影声程差以及入射声波直达波的入射角度有关,这里根据此参数设计传递函数的空间低通滤波器,将与空间函数相关的反射声滤掉。考虑到方向性,步骤三对步骤二中得到的式(10)进行进一步简化,定义矢量投影方向的延迟时间分别为,,,得到:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)作为优选,窗函数是典型的低通滤波器,根据三维矢量投影方向的空间延迟时间,多重三维传递函函数的窗函数滤波过程可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)式(12)中,δfix=1/δτix,δfiy=1/δτiy,δfiz=1/δτiz,i=1,2,3
…
n,为积分参数,矢量参数经过式(12)的空间滤波后,即可消除混响的影响,得到自由场条件下的空间传递函数。
14.作为优选,在进行测量时,直达声的入射角度j和θ以及反射声波的入射角度ji和θi可根据发射声源以及接收位置处的空间位置进行计算。
15.本发明由于采用了以上技术方案,具有显著的技术效果:对试验水池有限水域中的矢量声场进行了分析,建立了试验水池矢量声场条件下的系统频率响应模型。通过对该模型空间响应关系的分析,设计了矢量声场多重空间窗函数滤波器,并利用空间滤波器的方法在三维方向上消除了试验水池边界反射波对矢量声场中参数所产生的影响,得到了自由场条件下的三维矢量传递函数。
附图说明
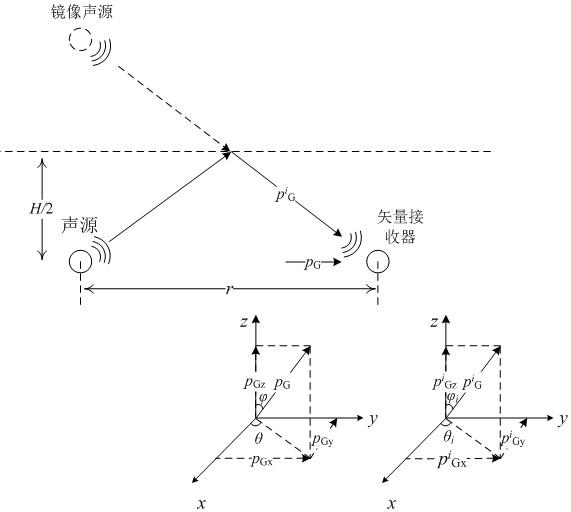
16.图1是本发明的直达声和反射声矢量参数三维空间投影图。
具体实施方式
17.下面结合附图与实施例对本发明作进一步详细描述。
18.实施例1一种水声试验水池中三维矢量参数传递函数测量方法,包括以下步骤:步骤一:根据水下声场中矢量参数带有方向性的特征,对水下矢量参数在自由场中沿轴向方向进行三维正交分解,并根据水下声场传播特性和声场边界特性条件,得到水下声场中的矢量参数三维正交分解分量;
步骤二:建立水下三维矢量声场传递函数模型,在三维坐标方向上将水下声场中的矢量参数与参考矢量参数相除,得出混响条件下水中声场的三维矢量传递函数;步骤三:对矢量传递函数进行空间滤波处理,消除不同方向矢量参数对自由场传递函数的影响,得到自由场声场条件下矢量参数传递函数。
19.步骤一的具体步骤如下:将在自由场的矢量参数定义为,将其进行三维正交分解并形成p
gx
、p
gy
和p
gz
;矢量参数在水域内会产生反射,得出第i次反射的反射矢量参数的正交分解分量为p
igx
、p
igy
和p
igz
。矢量参数在水域内会产生反射,假设第i次反射的反射矢量参数的正交分解分量为p
igx
、p
igy
和p
igz
;在声场中,p
gx
、p
gy
和p
gz
分别与p
igx
、p
igy
和p
igz
干涉叠加,得到矢量参数在水下总声场的三维正交分解分量、和;通过、和合成得到水下总声场中的矢量参数。
20.在步骤二中,通过得出直达声波数与反射波波数具有相同的幅度和/或通过定义系数,将传递函数进一步简化。
21.水下矢量声场的矢量参数包括水声声压梯度、质点振速、质点加速度。
22.实施例2与实施例1相同,不同的是步骤一中的矢量参数是水声声压梯度时,步骤一的具体步骤如下:1)在球面波自由场中,首先将声源抽象为点源,在远场条件下,球面波的声压梯度可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式(1)中,为水声声压梯度,该参数为矢量参数;j为复数单位,;为波数矢量, ,ω为角频率,为声速矢量;r为距离点源的距离,t为时间,p0为距离声源1m处的声压常数;2)水声声压梯度为矢量参数,其带有方向性,采用正交分析的方法,在接收点处将声压梯度沿着正交坐标轴进行分解,分别求解其在x、y和z三个方向的声压梯度分量,如式(2)所示:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式(2)中,pgx为水声声压梯度沿x轴方向的分量;pgy为水声声压梯度沿y轴方向的分量;pgz为水声声压梯度沿z轴方向的分量。θ为声压梯度方向在xoy坐标轴与x轴的夹角,j为声压梯度方向与坐标轴z轴的夹角;3)声波在有限水域内会产生反射波,由于水声声压梯度的是矢量参数,反射声波
的水声声压梯度与反射波的声程和角度有关,反射声波的水声声压梯度可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)式(4)中,pigx为第i次反射声波沿x轴方向的水声声压梯度分量;pigy为第i次反射声波沿y轴方向的水声声压梯度分量;pigz为第i次反射声波沿z轴方向的水声声压梯度分量,mi为第i次反射波的吸声系数;为第i次反射波的波数;ji为第i次反射波与z轴的夹角;θi为第i次反射波在xoy坐标轴上与x轴的夹角;4)通过式(2)和式(4)得出水下声场中距离声源距离为r处的声压梯度表示为:
ꢀꢀ
(5)为水下声场中距离声源距离为r处合成的水声声压梯度,且满足:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)式(1)和式(2)满足式(3),式(3)为。
23.步骤二中的具体步骤如下:水下声场中的声压梯度传递函数可表示为距离声源距离为r处的声压梯度与距离声源r处直达声相除,如式(7)所示:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)通过公式(2)至式(7)得到自由场条件下x、y和z方向的传递函数;当和时,则直达声沿某一个三维坐标方向的矢量分量为0,沿此方向全部为反射波分量,在分析时可以全部忽略,不需要进行矢量空间滤波。
24.当并且时,有:
ꢀꢀꢀꢀꢀꢀꢀꢀ
(8)在水下声场中,直达声波数与反射波波数具有相同的幅度,此时对上式进行进一步化简,可得:
ꢀꢀꢀꢀ
(9)式(9)中,定义系数,和,令,,;,,,进一步化简,可得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)。
25.从式(10)中可以看出,在完全的自由场中,矢量参数的传递函数通常为1。然而在水声试验水池中,由于受到了来自有限边界反射声波的影响,三维矢量参数的传递函数发生了变化。为了得到自由场条件下三维矢量参数的传递函数,需要消除试验水池有限水域对水下三维矢量参数产生的影响。从式(10)中可以看出,有限水域的反射波的影响与投影声程差以及入射声波直达波的入射角度有关,这里根据此参数设计传递函数的空间低通滤波器,将与空间函数相关的反射声滤掉。考虑到方向性,步骤三对步骤二中得到的式(10)进行进一步简化,定义矢量投影方向的延迟时间分别为,,,得到:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)窗函数是典型的低通滤波器,根据三维矢量投影方向的空间延迟时间,多重三维传递函函数的窗函数滤波过程可以表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)式(12)中,δfix=1/δτix,δfiy=1/δτiy,δfiz=1/δτiz,i=1,2,3
…
n,为积分参数,矢量参数经过式(12)的空间滤波后,即可消除混响的影响,得到自由场条件下的空间传递函数。
26.在进行测量时,直达声的入射角度j和θ以及反射声波的入射角度ji和θi可根据发射声源以及接收位置处的空间位置进行计算。
27.本发明一种水声试验水池中三维矢量参数传递函数测量方法,需要借助测量系统来实现,测量系统构成及要求如下:1)函数发生器:可以产生宽带信号的任意函数发生器;2)线性低频功率放大器,该功率放大器的功率足够大,并且具有满足要求的带宽,能够激励低频换能器产生需要测量的声波;3)发射换能器,该发射换能器在测量频带内是线性的,并且带宽满足要求;4)三维矢量水听器,该三维矢量水听器具有三维矢量通道,能够接收来自三维正交方向的矢量参数;5)电流取样器,可以测量功率放大器的发射电流信号; 6)滤波器,该滤波器的滤波频率覆盖测量频率范围;7)数据采集系统,能够对测量结果进行数据采
集和相应的分析;8)计算机,用于控制整个系统信号的收发和数据分析。
28.本发明一种水声试验水池中三维矢量参数传递函数测量方法,可以在任意形状的水声试验水池中进行。直达声和反射声的示意图如图1所示,其正交分解也同样在图中进行了标注。这里为了分析方便,以长为l,宽为w,高为h的立方体水池为例,投影声程差的计算过程如下:发射换能器和矢量接收器位于水下h/2深度处,发射器与矢量传感器的距离为r。这里先考虑水面反射的影响,根据虚源原理,可以得到水面反射声波的路径,并建立三维直角坐标系。坐标系中的xoy平面与发射换能器和矢量传感器所在平面相同。因此,直达波与坐标轴的夹角为θ=0
°
,j=90
°
。以同样的参考面对水面反射波进行正交分解。此时,水面反射声波对应的夹角为θ1=0
°
,,反射波的声程为,此时在坐标轴x方向的投影声程差为。同理,在y方向的投影声程差δr1y=0,在z方向的投影声程差为。采用同样方法可以得到立方体试验水池其他面反射波的三维投影声程差,,,i=1,2,
…
6。通常情况下,由于消声水池存在消声尖劈,经过水池反射后不太会出现二次反射,因此,本示例只考虑了一次反射,部分特殊情况可以考虑二次反射。
29.本发明一种水声试验水池中三维矢量参数传递函数测量方法,测量过程如下:在自由场条件下,函数发生器产生测量所需的宽带信号,该信号通过线性功率放大器激励发射换能器产生测量所需要的声信号。电流取样器用于测量功率放大器输出的发射电流信号。矢量水听器用于接收自由场中的矢量参数信号。电流取样信号和矢量水听器接收到的矢量信号分别通过滤波器进行滤波后,输入到数据采集系统中进行数据处理。
30.本发明一种水声试验水池中三维矢量参数传递函数测量方法,信号处理过程如下:这里以电流传递函数为例进行分析。系统的输入信号为电流信号,输出信号为电压信号,此时的传递函数为转移阻抗。对发射电流信号和矢量水听器的开路电压信号进行频域分析,得到其在频域下的转移阻抗表达式:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)式(13)中,uo( f )为矢量水听器输出开路电压频率响应,ui( f )为功率放大器激励电流的频率响应,z( f )为转移阻抗的频率响应。
31.可以对z( f )进行正交分解,三个方向的转移阻抗满足:对其进行处理,可以消除反射声的影响,得到自由场的转移阻抗:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)利用三维转移阻抗,既可以得到声场中声源的发射三维矢量参数响应,也可以进一步计算其三维灵敏度响应。
32.总之,以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所作的均等变化与修饰,皆应属本发明专利的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1