一种环境数据重建方法、装置、系统及存储介质与流程
本发明涉及车辆自动驾驶,尤其涉及一种环境数据重建方法、装置、系统及存储介质。
背景技术:
1、自动驾驶车辆由于其具有提高交通安全性、减少能源消耗以及提升出行便利性等潜能,被认为是未来汽车发展的主要方向。当前主流自动驾驶系统通常包含定位导航装置、环境感知装置、决策规划装置和车辆控制装置等。
2、其中,定位导航装置用于获取高精度地图,并基于高精度地图对车辆的行驶路径进行实时定位规划,获得车辆的参考路径;环境感知装置通过各类传感器采集环境信息,并利用深度学习模型对动态障碍物进行趋势预测,动态获取车辆周围的实时环境信息;决策规划装置针对定位导航装置和环境感知装置输出的数据,进行信息融合处理后进行自动驾驶决策规划,以使车辆控制装置根据决策方案控制车辆。但车辆行驶过程中环境变化较高,高精度地图和环境信息的信息复杂度高,决策规划装置进行信息处理和融合需要时间较长,导致决策规划装置决策规划的效率较低,无法快速规划出最优路径。
技术实现思路
1、本发明提供一种环境数据重建方法、装置、系统及存储介质,以解决现有自动驾驶策略中,决策规划装置处理的信息复杂度高,导致决策规划的效率较低,无法快速规划出最优路径的问题。
2、提供一种环境数据重建方法,包括:
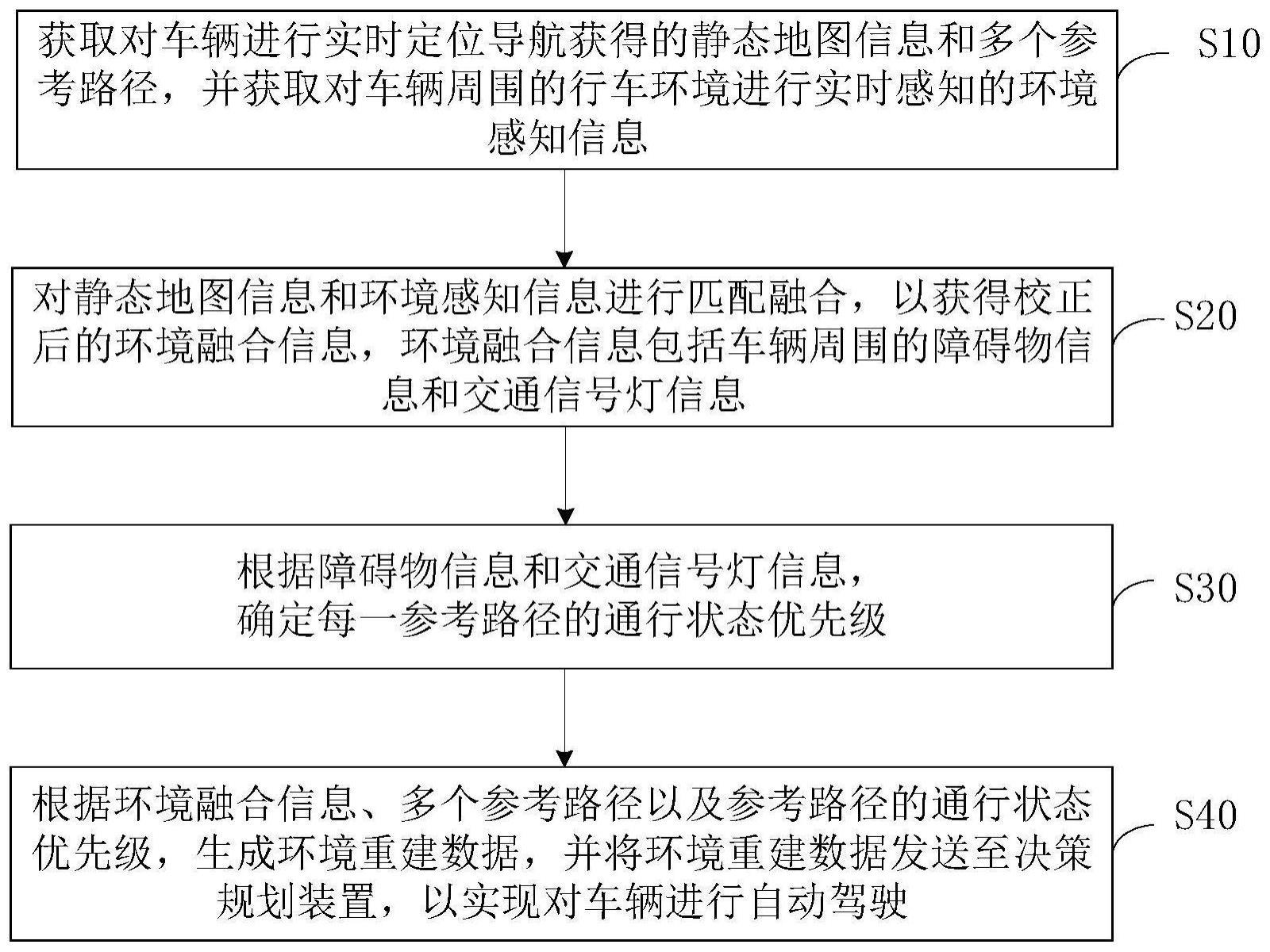
3、获取对车辆进行实时定位导航获得的静态地图信息和多个参考路径,并获取对车辆周围的行车环境进行实时感知的环境感知信息;
4、对静态地图信息和环境感知信息进行匹配融合,以获得校正后的环境融合信息,环境融合信息包括车辆周围的障碍物信息和交通信号灯信息;
5、根据障碍物信息和交通信号灯信息,确定每一参考路径的通行状态优先级;
6、根据环境融合信息、多个参考路径以及参考路径的通行状态优先级,生成环境重建数据,并将环境重建数据发送至决策规划装置,以实现对车辆进行自动驾驶。
7、提供一种环境数据重建装置,包括:
8、获取模块,用于获取对车辆进行实时定位导航获得的静态地图信息和多个参考路径,并获取对车辆周围的行车环境进行实时感知的环境感知信息;
9、融合模块,用于对静态地图信息和环境感知信息进行匹配融合,以获得校正后的环境融合信息,环境融合信息包括车辆周围的障碍物信息和交通信号灯信息;
10、确定模块,用于根据障碍物信息和交通信号灯信息,确定每一参考路径的通行状态优先级;
11、生成模块,用于根据环境融合信息、多个参考路径以及参考路径的通行状态优先级,生成环境重建数据,并将环境重建数据发送至决策规划装置,以实现对车辆进行自动驾驶。
12、提供一种环境数据重建装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述环境数据重建方法的步骤。
13、提供一种车辆自动驾驶系统,包括:
14、定位导航装置,用于对车辆进行实时定位导航,以获得静态地图信息和多个参考路径;
15、环境感知装置,用于对车辆周围的行车环境进行实时感知,以获得的环境感知信息;
16、环境数据重建装置,用于根据地图路径信息和环境感知信息生成环境重建数据,并发送环境重建数据至决策规划装置;
17、决策规划装置,用于根据环境重建数据进行自动驾驶决策规划以获得自动驾驶方案;
18、车辆控制装置,用于根据自动驾驶方案对车辆进行自动驾驶控制。
19、提供一种可读存储介质,该可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述环境数据重建方法的步骤。
20、上述环境数据重建方法、装置、系统及存储介质所提供的一个方案中,通过获取对车辆进行实时定位导航获得的静态地图信息和多个参考路径,并获取对车辆周围的行车环境进行实时感知的环境感知信息,然后对静态地图信息和环境感知信息进行匹配融合,以获得校正后的环境融合信息,环境融合信息包括车辆周围的障碍物信息和交通信号灯信息,再根据障碍物信息和交通信号灯信息,确定每一参考路径的通行状态优先级,最后根据环境融合信息、多个参考路径以及参考路径的通行状态优先级,生成环境重建数据,并将环境重建数据发送至决策规划装置,以实现对车辆进行自动驾驶;本发明中,通过将提前环境感知信息与静态地图信息的融合分析,有选择地输出为环境融合数据,并基于环境融合数据确定参考路径的通行状态优先级,然后生成环境重建数据输出给决策规划装置,为决策规划模块提供更为完备、精确的环境重建数据,且无需决策规划装置对未经筛选的原始信息进行处理,降低了决策规划的信息复杂度,提高了决策规划的效率,从而能够基于高精度环境重建数据快速规划出最优路径。
技术特征:
1.一种环境数据重建方法,其特征在于,包括:
2.如权利要求1所述的环境数据重建方法,其特征在于,所述根据所述障碍物信息和交通信号灯信息,确定每一所述参考路径的通行状态优先级,包括:
3.如权利要求2所述的环境数据重建方法,其特征在于,所述根据所述障碍物信息确定所述车辆周围的障碍物对所述车辆的影响力,以根据所述影响力确定障碍物优先级,包括:
4.如权利要求1所述的环境数据重建方法,其特征在于,所述根据所述障碍物信息和交通信号灯信息,确定每一所述参考路径的通行状态优先级,包括:
5.如权利要求1所述的环境数据重建方法,其特征在于,所述根据所述环境融合信息、所述多个参考路径以及所述参考路径的通行状态优先级,生成环境重建数据,包括:
6.如权利要求5所述的环境数据重建方法,其特征在于,所述根据所述环境融合信息、所述多个参考路径,以及所述参考路径的通行状态优先级和停止线位置,生成预设数据格式所述环境重建数据,包括:
7.如权利要求1-6任一项所述的环境数据重建方法,其特征在于,所述对所述静态地图信息和所述环境感知信息进行匹配融合,以获得校正后的环境融合信息,包括:
8.一种环境数据重建装置,其特征在于,包括:
9.一种车辆自动驾驶系统,包括定位导航装置、环境感知装置、决策规划装置、车辆控制装置和环境数据重建装置;
10.一种可读存储介质,所述可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述环境数据重建方法的步骤。
技术总结
本发明公开了一种环境数据重建方法、装置、系统及存储介质,方法包括:获取对车辆进行实时定位导航获得的静态地图信息和多个参考路径,并获取对车辆周围的行车环境进行实时感知的环境感知信息;对静态地图信息和环境感知信息进行匹配融合,以获得校正后的环境融合信息,环境融合信息包括车辆周围的障碍物信息和交通信号灯信息;根据障碍物信息和交通信号灯信息,确定每一参考路径的通行状态优先级;根据环境融合信息、多个参考路径及其通行状态优先级,生成环境重建数据发送至决策规划装置,以实现对车辆进行自动驾驶;本发明中,降低了决策规划的信息复杂度,提高了决策规划的效率,从而能够基于高精度环境重建数据快速规划出最优路径。
技术研发人员:张剑锋,王玉龙,闵欢,覃小艺,刘文如,李景俊
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!