一种应用于少儿编程的指令贴识别机器人
1.本实用新型属于机电技术领域,特别涉及一种应用于少儿编程的指令贴识别机器人。
背景技术:
2.随着少儿编程教育不断普及,应用于少儿编程的机器人动作指令识别也越来越多样化,目前最常见的实现机器人动作指令方式是技术人员提前将机器人行走路径网络化,并在每个位置的网络上标注机器人执行动作的内容,然后提前给机器人编程,使机器人在到达指令位置后可以感应出所处位置的纸质指令贴并执行所处位置标注的动作内容。这种方法一是需要对网络上的指令设置形式有要求,而对于纸质类的指令贴,在使用时间过长或外界环境因素,容易破损和脱落。二是对机器人能完成指令的方式太过单一化,在机器人的行走路径网络中的设置缺少娱乐性和灵活性。
3.综上所述,上述常见的完成动作指令方式对于环境适用范围十分有限,且应用于少儿编程教学中趣味性很低。
技术实现要素:
4.为了克服上述现有技术的缺点,本实用新型的目的在于提供一种应用于少儿编程的指令贴识别机器人,通过设计不同指令的射频芯片,根据射频原理,机器人将通过射频识别器识别芯片中相关指令,代替了传统的纸质指令贴形式;并可进一步根据识别的指令完成相应动作;且可在机器人行走路径上设置多元的奖励与陷阱,这是传统网络路径中所不具有的。此设计新型不仅在传统上具有创新性,更在实用性和适应环境因素等方面具有改革性。使应用于少儿编程的指令贴机器人在教学上更具有灵活性。
5.为了实现上述目的,本实用新型采用的技术方案是:
6.一种应用于少儿编程的指令贴识别机器人,机器人带有若干行进机构,行进路径采用九宫格网络路径,所述九宫格网络路径的各网格为站点,不同站点设置有不同的射频芯片,在机器人正面设置有雷达传感器,在机器人底部设有用于识别所述射频芯片的编号和位置信息的射频识别器。
7.进一步地,所述射频识别器与行进机构的数量相等,分别位于每个行进机构的底部。
8.进一步地,在每个所述行进机构底部设有一个颜色传感器。
9.进一步地,在所述机器人前方中央设有蜂鸣器。
10.进一步地,在所述机器人的底部中间设有红外寻迹传感器。
11.与现有技术相比,本实用新型的有益效果是:
12.1、指令贴机器人通过设置射频识别器识别九宫格网络路径的每个站点上的射频芯片,即读取各个位置上的射频芯片的编号,以及对应编号芯片内的指令信息,克服了纸质贴片容易破损和脱落的问题。
13.2、进一步地,可根据识别的指令信息进行响应,相对于传统的机器人动作指令方式而言,由于采用射频信号识别方式进行指令引导,抗环境干扰的能力更强,即适用的环境范围更广泛,且识别的指令更具体化多样化,可适用于恶劣环境,并满足教学的娱乐性。
附图说明
14.图1为九宫格网络路径图。
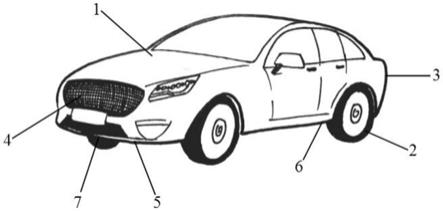
15.图2为机器人结构示意图。
16.其中:1
‑
机器人,2
‑
行进机构,3
‑
蜂鸣器,4
‑
雷达传感器,5
‑
射频识别器,6
‑
颜色传感器,7
‑
红外寻迹传感器,8
‑
九宫格网络路径,a
‑
启动并前进一格,b
‑
向右前进一格,c
‑
向左前进一格,d
‑
停止前进,e
‑
陷阱。
具体实施方式
17.下面结合附图和实施例详细说明本实用新型的实施方式。
18.实施例1
19.本实用新型采用九宫格网络路径8为行进路径,参考图1,九宫格网络路径8的各个网格即为站点,每个网格中设置有不同的射频芯片,各射频芯片存储有不同的编号以及指令信息。
20.在本实施例中,示出了5个站点的射频芯片,存储的指令信息分别为:
21.a:启动并前进一格;
22.b:向右前进一格;
23.c:向左前进一格;
24.d:停止前进;
25.e:陷阱。
26.参考图2,本实用新型的机器人1采用汽车机器人,其带有四个行进机构2,即四个车轮,在机器人1的前方正面设置有雷达传感器4,用于监测机器人的行进轨迹和行进状态。在机器人1底部设有射频识别器5,射频识别器5可识别前述的各个射频芯片的编号信息、位置信息以及指令信息。
27.本实施例中,射频识别器5可与行进机构2的数量相等,并分别位于每个行进机构2的底部。
28.根据该结构,当机器人1沿行进路径行进时,每到达一个站点,即可利用射频识别器5识别出所处的位置和相应的站点编号以及指令信息,该信息可通过有线或无线方式传输至控制端,供使用者第一时间获取,从而克服了纸质指令贴容易脱落和损坏以及难以第一时间获取站点信息的问题。
29.实施例2
30.在实施例1的基础上,九宫格网络路径8的每个站点可设置不同颜色,代表不同的陷阱或是奖励,其中红色方格表示陷阱e,同样地,在每个行进机构2底部设有一个颜色传感器6,用于判别不同的色块,并在机器人1前方中央设有蜂鸣器3,当机器人1进入陷阱e时,蜂鸣器3将发出警报,增加趣味性。
31.实施例3
32.在实施例1的基础上,在机器人1的底部中间设有红外寻迹传感器7,通过发射出的红外信号和接收管接受到的信息,保证机器人1在行进过程中不驶离九宫格区域。
33.实施例4
34.在实施例1
‑
3任一实施例的基础上,在控制端接收各传感器和射频识别器5采集的信息并发出相应的指令信息由机器人1响应。
35.具体地,射频识别器5读取到站点a的指令信息时,机器人1将在九宫格区域内开始启动并前进一格,当读取到站点b的指令信息时,机器人1将向右前进一格,当读取到站点c的指令信息时,机器人1将向左前进一格,当读取到站点d的指令信息时,机器人1将停止行进动作完成指令到达终点。
36.本实施例将射频芯片设置成多元化的动作指令,根据射频原理,机器人1利用射频识别器5自动识别并读取各个射频芯片中的指令信息做出响应,此设计新型不同于现有指令贴机器人在于,射频识别器根据射频原理可以高速的同时识别多个射频芯片,且能工作于各种恶劣环境,使得应用范围更加广泛,可实现的指令条件也更加宽松。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种应用于少儿编程的指令贴识别机器人,机器人(1)带有若干行进机构(2),行进路径采用九宫格网络路径(8),其特征在于,所述九宫格网络路径(8)的各网格为站点,不同站点设置有不同的射频芯片,在机器人(1)正面设置有雷达传感器(4),在机器人(1)底部设有用于识别所述射频芯片的编号和位置信息的射频识别器(5)。2.根据权利要求1所述应用于少儿编程的指令贴识别机器人,其特征在于,所述射频识别器(5)与行进机构(2)的数量相等,分别位于每个行进机构(2)的底部。3.根据权利要求1所述应用于少儿编程的指令贴识别机器人,其特征在于,在每个所述行进机构(2)底部设有一个颜色传感器(6)。4.根据权利要求1所述应用于少儿编程的指令贴识别机器人,其特征在于,在所述机器人(1)前方中央设有蜂鸣器(3)。5.根据权利要求1所述应用于少儿编程的指令贴识别机器人,其特征在于,在所述机器人(1)的底部中间设有红外寻迹传感器(7)。
技术总结
一种应用于少儿编程的指令贴识别机器人,机器人带有若干行进机构,行进路径采用九宫格网络路径,所述九宫格网络路径的各网格为站点,不同站点设置有不同的射频芯片,在机器人正面设置有雷达传感器,在机器人底部设有用于识别所述射频芯片的编号和位置信息的射频识别器,本实用新型通过设计不同指令的射频芯片,根据射频原理,机器人将通过射频识别器识别芯片中相关指令,代替了传统的纸质指令贴形式;并可进一步根据识别的指令完成相应动作;且可在机器人行走路径上设置多元的奖励与陷阱,这是传统网络路径中所不具有的。这是传统网络路径中所不具有的。这是传统网络路径中所不具有的。
技术研发人员:徐微 杜雅茜 李睿勋 王瑶瑶 郝琦琦
受保护的技术使用者:西安交通大学城市学院
技术研发日:2021.06.01
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1