使用广角成像设备的3D重建的制作方法
本公开内容的实施方式总体上涉及移动计算技术,并且更具体地但不作为限制地涉及用于在客户端设备处呈现增强现实(augmented-reality,ar)内容的系统。
背景技术:
1、增强现实是其中通过计算机生成的感知信息来增强存在于现实世界中的对象的现实世界环境的交互体验,有时跨多个感知模态,包括视觉、听觉、触觉、体感和嗅觉。增强现实的主要价值是数字世界的组成部分融入人对现实世界的感知中的方式,而不是作为数据的简单显示,而是通过作为环境的自然部分感知的沉浸感的集成。
2、ar系统可以利用虚拟3d模型来定位和跟踪用户的ar设备。3d重建是用于推断由图像集合捕获的场景的几何结构的技术。
技术实现思路
技术特征:
1.一种使用一个或更多个处理器确定广角图像的姿态的方法,包括:
2.根据权利要求1所述的方法,其中,确定所述经去畸变的区域的估计姿态包括:将所述经去畸变的区域中的特征与来自一个或更多个其他广角图像的已经去畸变的其他区域中的特征进行比较。
3.根据权利要求1所述的方法,其中,确定所述估计姿态包括将所述经去畸变的区域中的特征与点云中的特征进行比较。
4.根据权利要求1所述的方法,其中,确定估计姿态包括:
5.根据权利要求4所述的方法,还包括:
6.根据权利要求4所述的方法,还包括:
7.根据权利要求6所述的方法,其中,所述广角图像的更新姿态是从经优化的估计姿态中的至少一些导出的。
8.根据权利要求6所述的方法,还包括:在优化所述经去畸变的区域的估计姿态之后优化所述广角图像的姿态。
9.根据权利要求1所述的方法,其中,导出所述广角图像的姿态包括:将所述广角图像的姿态确定为所述估计姿态中的至少一些估计姿态的平均值。
10.根据权利要求4所述的方法,其中,参考从由运动传感器数据和位置传感器数据构成的组中选择的传感器数据来确定一致性。
11.一种数据处理系统,包括:
12.根据权利要求11所述的数据处理系统,其中,确定所述经去畸变的区域的估计姿态包括:将所述经去畸变的区域中的特征与来自一个或更多个其他广角图像的已经去畸变的其他区域中的特征进行比较。
13.根据权利要求11所述的数据处理系统,其中,确定估计姿态包括:
14.根据权利要求11所述的数据处理系统,其中,参考位置传感器数据或运动传感器数据来确定一致性。
15.根据权利要求11所述的数据处理系统,其中,所述操作还包括:
16.一种包括指令的非暂态机器可读介质,所述指令在由机器读取时使所述机器执行用于确定广角图像的姿态的操作,包括:
17.根据权利要求16所述的非暂态机器可读介质,其中,确定所述经去畸变的区域的估计姿态包括:将所述经去畸变的区域中的特征与来自一个或更多个其他广角图像的已经去畸变的其他区域中的特征进行比较。
18.根据权利要求16所述的非暂态机器可读介质,其中,所述确定估计姿态的操作包括:
19.根据权利要求18所述的非暂态机器可读介质,其中,参考位置传感器数据或运动传感器数据来确定一致性。
20.根据权利要求17所述的非暂态机器可读介质,其中,所述操作还包括:
技术总结
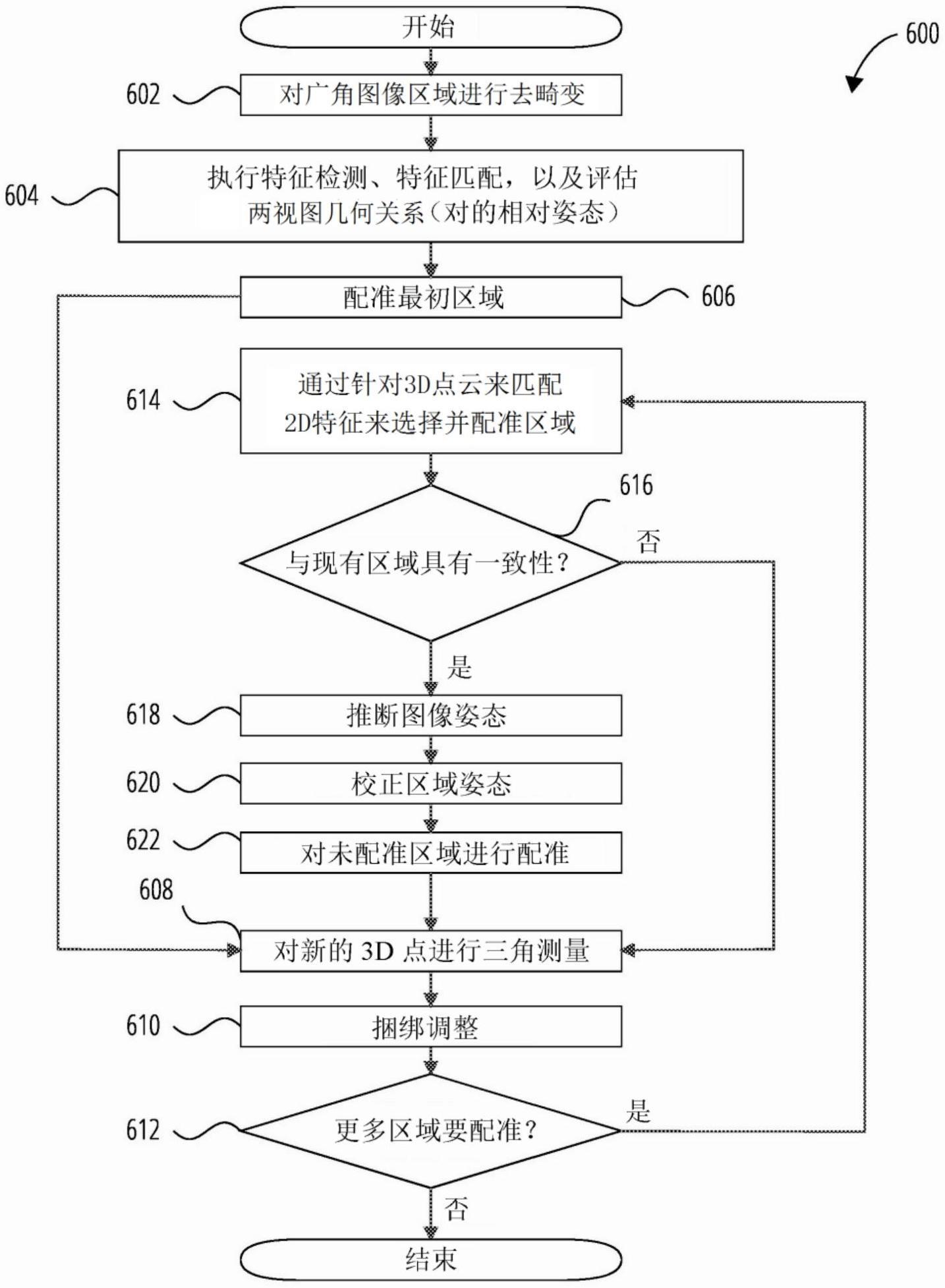
广角图像的姿态由对广角图像的区域进行去畸变(602)、确定广角图像的经去畸变的区域的估计姿态(604、614)以及从经去畸变的区域的估计姿态导出广角图像的姿态(616、618)来确定。可以通过将经去畸变的区域中的特征与来自一个或更多个先前广角图像的先前经去畸变的区域中的特征进行比较以及通过将经去畸变的区域中的特征与点云中的特征进行比较来确定经去畸变的区域的估计姿态。
技术研发人员:帕特里克·福克斯-罗伯茨,理查德·麦科马克,潘琪,爱德华·詹姆斯·罗斯滕
受保护的技术使用者:斯纳普公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!