用于跟踪多个机器的活动的系统和方法与流程
本发明涉及跟踪多个机器的活动,并且更具体地涉及用于跟踪至少一个智能机器和/或至少一个非智能或所谓的哑机器的活动的系统和方法。
背景技术:
1、机器控制的传统方法可基于来自位于车队中的每个作业机器上的传感器的数据来识别作业机器(诸如,拖运卡车)的工作循环(例如,挖掘/拖运/倾卸)的区段。然而,多个作业机器(例如,所有作业机器)上的传感器可能是昂贵的,难以协调或校准,并且至少部分地在整个车队方面更易于失效。
2、美国专利no.5,546,093(“'093专利”)描述了一种用于在第一和第二运土或建筑机械之间提供导航信号的系统和方法。该系统可以确定第一和第二机器的位置,并基于最佳路径确定第二机器相对于第一机器的期望位置。根据'093专利,所需位置可以从第一机器传送到第二机器。
技术实现思路
1、在一个方面,本发明实现了一种跟踪工地处的多个机器的活动的方法,该方法包括:实时提供地理围栏,地理围栏限定与多个机器中的智能机器的工作循环中识别的工作段相关联的位置周围的区域;以及当仅基于从哑机器传输的位置信息来确定哑机器进入由地理围栏限定的区域时,实时地识别多个机器中的多个哑机器中的每一个的工作循环的至少一个工作段,位置信息包括哑机器的位置和在位置处的相应时间。
2、在另一方面,本公开实现或提供了一种存储计算机可读指令的非暂时性计算机可读存储介质,该计算机可读指令在由一个或多个计算机执行时使得一个或多个计算机执行一种方法,该方法包括:基于来自智能机器的一个或多个传感器的传感器数据来识别智能机器的至少一个工作段;以及基于智能机器的识别的至少一个工作段和从哑机器发送的位置数据来识别多个非智能机器中的每一个的至少一个工作段,该数据仅包括哑机器的位置信息。可以与工地处的第一位置相关联地识别智能机器的识别的至少一个工作段。当哑机器在与智能机器的识别的至少一个工作段相关联的第一位置的预定距离内时,可识别每个哑机器的至少一个工作段。
3、在又一方面,可以提供或实现用于管理来自工地的数据的系统。该系统可以包括后台远程信息处理系统,该后台远程信息处理系统包括处理电路,用于自动表征工地处的工作循环的工作段;在工地处的智能拖运卡车,其用于从能拖运卡车的多个传感器收集第一操作数据,并且经由智能拖运卡车的第一通信电路将收集的第一操作数据经由无线通信网络发送到后台远程信息处理系统;以及在工地处的多个非智能拖运卡车,其用于将第二操作数据发送回后台远程信息处理系统。智能拖运卡车的第一操作数据可以表示智能拖运卡车在工地内的工作循环的工作段。来自非智能拖运卡车的第二操作数据可以仅包括与工地内的非智能拖运卡车相关联的位置信息。后台远程信息处理系统可以通过以下方式来自动地表征非智能拖运卡车中的每一个的工作段:基于第一操作数据使用第一操作数据来表征智能拖运卡车的工作段,以及基于来自仅包括与非智能拖运卡车相关联的位置信息的非智能拖运卡车的第二操作数据,将智能拖运卡车的表征的工作段与非智能拖运卡车的工作段相关联。
4、根据以下描述和附图,本发明的其他特征和方面将是容易理解的。
技术特征:
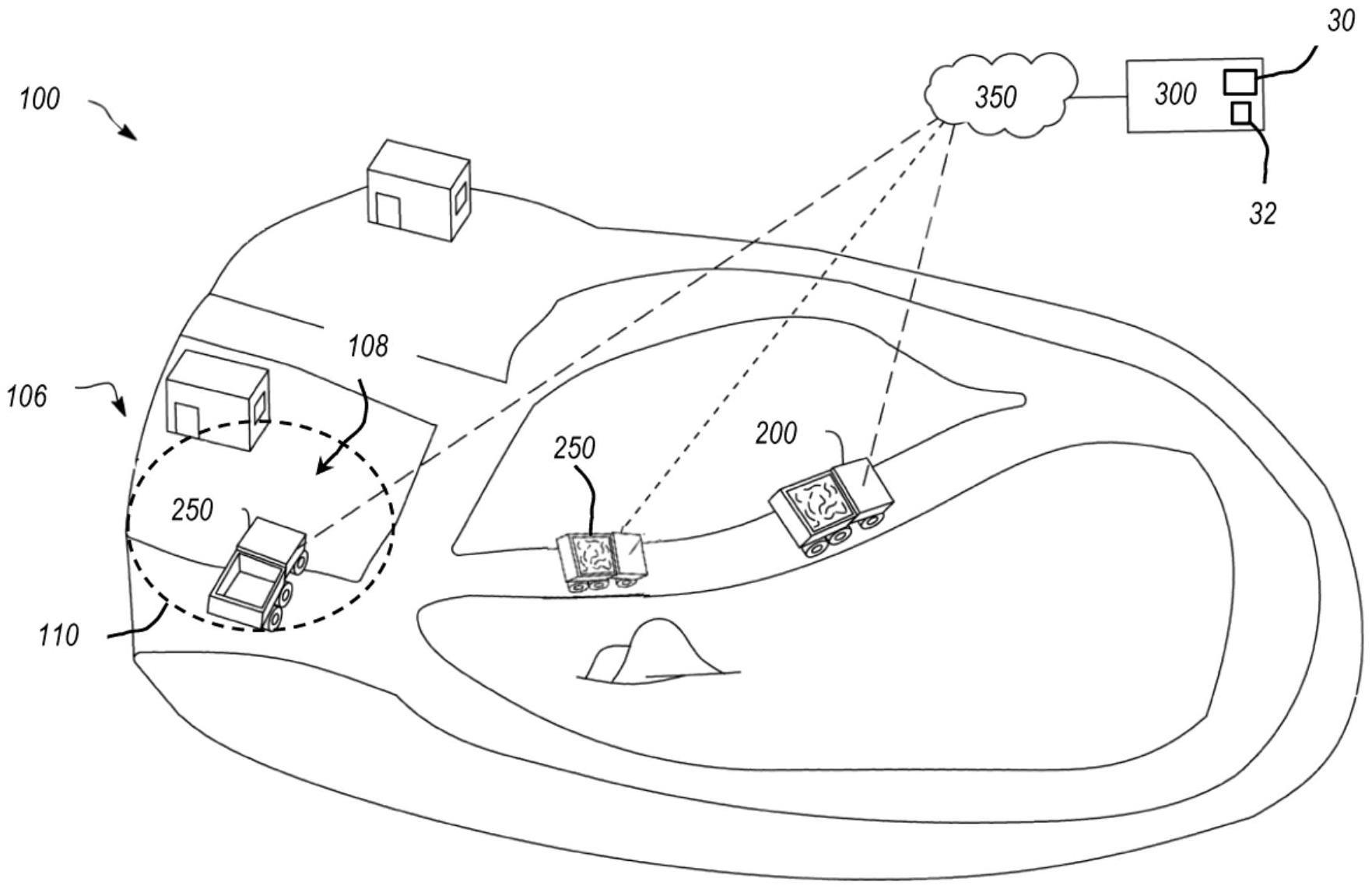
1.一种用于管理来自工地的数据的系统(100),包括:
2.根据权利要求1所述的系统(100),其中,当所述非智能拖运卡车(250)在距与所述智能拖运卡车(200)的所述表征的工作段相关联的位置的预定距离内时,所述后台远程信息处理系统(300)将所述智能拖运卡车(200)的所述表征的工作段与所述非智能拖运卡车(250)的所述工作段相关联。
3.根据权利要求1所述的系统(100),其中,所述基于所述第一操作数据来表征所述智能拖运卡车(200)的所述工作段导致在所述工地(106)内的位置周围设置预定区域的地理围栏(110),所述位置与所述智能拖运卡车(200)的所述表征的工作段相关联。
4.根据权利要求1所述的系统(100),其中,针对所述智能拖运卡车(200)的不同工作段执行多次所述基于所述第一操作数据来表征所述智能拖运卡车(200)的所述工作段,并且每次导致在所述工地(106)内的不同位置周围设置地理围栏(110),所述地理围栏(110)与所述表征的所述智能拖运卡车(200)的不同工作段相关联。
5.根据权利要求1所述的系统(100),其中,所述位置信息包括与所述非智能拖运卡车(250)的位置相对应的时间。
6.根据权利要求1所述的系统(100),其中,所述后台远程信息处理系统(300)针对每个所述非智能拖运卡车(250)的多个工作循环自动表征每个所述非智能拖运卡车(250)的工作段。
7.根据权利要求1所述的系统(100),其中,所述后台远程信息处理系统(300)针对每个所述非智能拖运卡车(250)的每个工作循环的多个工作段自动表征每个所述非智能拖运卡车(250)的工作段。
8.根据权利要求1所述的系统(100),其中,所述后台远程信息处理系统(300)基于所述将所述智能拖运卡车(200)的表征的工作段与所述非智能拖运卡车(250)的工作段相关联,为所有所述非智能拖运卡车(250)和所述智能拖运卡车(200)提供工作循环生产率数据。
9.根据权利要求1所述的系统(100),其中,所述后台远程信息处理装置(300)通过将另一智能拖运卡车(200)的表征的工作段与所述非智能拖运卡车(250)的工作段相关联,来自动表征每个所述非智能拖运卡车(250)的工作段。
10.一种跟踪工地处的多个机器(200,250)的活动的方法,包括:
11.根据权利要求10所述的方法,还包括基于来自所述智能机器(200)的一个或多个传感器(20a,20b,20c等)的传感器信息来实时地识别所述智能设备(200)的所述工作段;
12.根据权利要求10所述的方法,进一步包括:
13.根据权利要求10所述的方法,其中,所述识别每个所述哑机器(250)的至少一个工作段将所述至少一个工作段表征为所述哑机器(250)的工作循环的挖掘段、所述哑机器(250)的工作循环的运输段,以及所述哑机器(250)的工作循环的倾卸段中的一者。
14.根据权利要求10所述的方法,还包括提供限定与所述智能机器的识别的工作段相关联的另一位置周围的区域的地理围栏(110)。
技术总结
用于跟踪多个机器的活动的系统和方法可包括基于来自智能机器的一个或多个传感器的传感器数据来识别智能机器的至少一个工作段;以及基于智能机器的识别的至少一个工作段和从非智能机器发送的位置数据来识别多个非智能机器中的每一个的至少一个工作段。可以与工地处的第一位置相关联地识别智能机器的识别的至少一个工作段。当非智能机器在与智能机器的识别的至少一个工作段相关联的第一位置的预定距离内时,可识别每个非智能机器的至少一个工作段。
技术研发人员:B·K·波莫,C·T·布里克纳,S·C·麦克布赖德,V·G·塞瓦拉吉
受保护的技术使用者:卡特彼勒公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!