用于生成经校正图像的系统和方法与流程
本技术整体涉及图像生成,并且更具体地涉及生成没有由图像传感器视场中的至少一个物体引起的饱和衰减的经校正图像。
背景技术:
1、使用基于x射线的图像的配准依赖于识别x射线图像中的患者解剖结构的解剖元件。可以基于x射线图像中对应于不同解剖元件以及相关联的厚度的不同衰减水平来识别这些解剖元件。金属(诸如在医疗装置中使用的那些金属)也引起图像中的衰减并且将与解剖元件一起出现在图像中。
技术实现思路
1、本公开的示例性方面包括:
2、根据本公开的至少一个实施方案的用于生成经校正图像的方法包括:基于关于患者解剖结构内的使患者解剖结构的图像中的衰减饱和的物体的信息来计算成像装置的多个位姿;在该多个位姿中的每个位姿处从成像装置接收图像以产生图像集,每个图像描绘患者的解剖元件和物体的至少一部分;在图像集中的图像中其中识别物体已经引起饱和衰减的一组饱和区域以及其中物体没有引起饱和衰减的一组不饱和区域;以及通过组合来自该一组不饱和区域的数据来生成经校正图像,该经校正图像描绘解剖特征,该解剖特征具有比该一组饱和区域中的所有饱和区域更少的饱和区域。
3、本文的各方面中的任一方面,还包括接收具有该信息的外科手术计划。
4、本文的各方面中的任一方面,其中计算成像装置的多个位姿包括计算保持成像装置的机器人臂的运动,该机器人臂具有至少五个运动自由度。
5、本文的各方面中的任一方面,其中成像装置利用x射线。
6、本文的各方面中的任一方面,其中识别该一组饱和区域和该一组不饱和区域使用特征辨别、机器学习或基于阈值的算法。
7、本文的各方面中的任一方面,其中该信息包括物体的至少一个尺寸。
8、本文的各方面中的任一方面,其中生成经校正图像进一步基于对应于图像集中的每个图像的位姿。
9、本文的各方面中的任一方面,其中物体包括多个物体。
10、本文的各方面中的任一方面,其中计算该多个位姿以获得经校正图像中的解剖元件的每个部分的无遮挡视图。
11、根据本公开的至少一个实施方案的用于生成经校正图像的方法包括:从成像装置接收图像集,每个图像描绘患者的解剖元件和物体的至少一部分;在图像集中的图像中识别其中物体已经引起饱和衰减的一组饱和区域和其中物体没有引起饱和衰减的一组不饱和区域,其中解剖元件的至少一部分在该一组饱和区域的至少一个饱和区域和该一组不饱和区域的至少一个不饱和区域内;以及通过组合来自该一组不饱和区域的数据来生成经校正图像,经校正图像描绘解剖元件的来自该至少一个不饱和区域的部分。
12、本文的各方面中的任一方面,还包括基于基准标记确定物体和/或解剖元件在图像中的位姿。
13、本文的各方面中的任一方面,还包括基于基准标记为每个图像确定成像装置的位姿,并且其中部分地基于每个图像的对应位姿生成经校正图像。
14、本文的各方面中的任一方面,还包括接收具有关于物体的信息的外科手术计划。
15、本文的各方面中的任一方面,其中机器人臂具有至少五个运动自由度。
16、本文的各方面中的任一方面,其中该信息包括该至少一个物体的至少一个尺寸。
17、本文的各方面中的任一方面,其中计算该多个位姿以获得解剖元件的每个部分的无遮挡视图。
18、本文的各方面中的任一方面,其中识别该一组饱和区域和该一组不饱和区域包括使用特征辨别、机器学习或基于阈值的算法中的至少一者。
19、本文的各方面中的任一方面,其中物体是金属物体。
20、本文的各方面中的任一方面,其中物体包括多个物体。
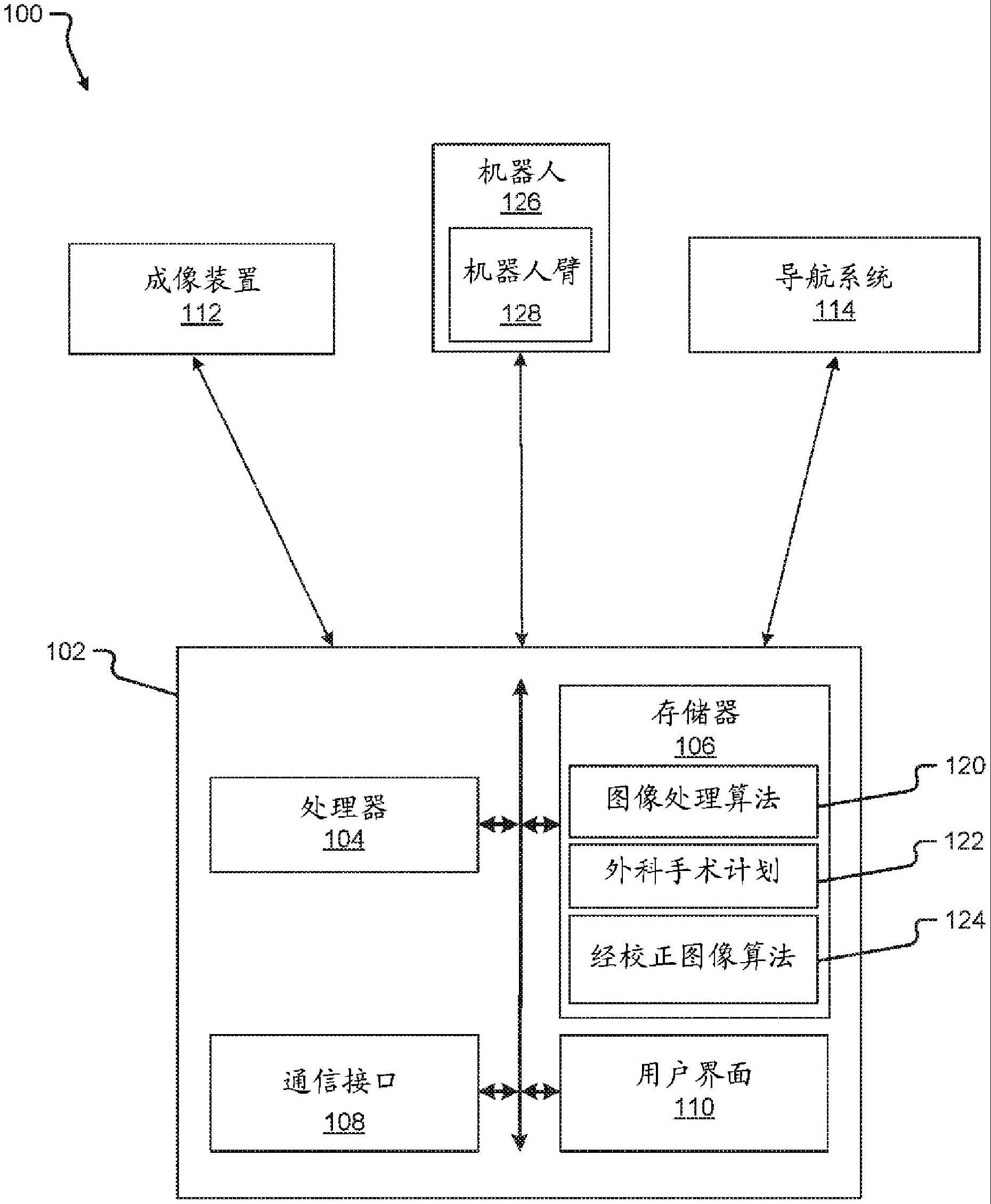
21、根据本公开的至少一个实施方案的用于生成经校正图像的系统包括:至少一个成像装置;多个机器人臂,该多个机器人臂中的至少一个臂被配置成保持该至少一个成像装置;至少一个处理器;和至少一个存储器,该至少一个存储器存储用于由该至少一个处理器执行的指令,这些指令当被执行时使该至少一个处理器:基于关于至少一个物体和至少一个解剖元件的信息计算成像装置的一个或多个位姿;在该一个或多个位姿中的每个位姿处从成像装置接收一个或多个图像,该一个或多个图像描绘该至少一个解剖元件和该至少一个物体的至少一部分;在该一个或多个图像中的每个图像中识别其中该至少一个物体已经影响衰减的第一组区域以及在该一个或多个图像中的每个图像中识别其中该至少一个物体没有影响衰减的第二组区域;以及基于组合该一个或多个图像中的每个图像中的第二组区域来生成复合图像,该复合图像描绘解剖特征,该解剖特征具有比第一组区域的所有区域更少的区域。
22、本文的各方面中的任一方面,其中机器人臂具有至少五个运动自由度。
23、本文的各方面中的任一方面,其中该存储器存储用于由该至少一个处理器执行的附加指令,该附加指令在被执行时进一步使该至少一个处理器:接收包括该信息的外科手术计划。
24、本公开的一个或多个方面的细节在以下附图和描述中阐述。根据说明书和附图以及权利要求书,本公开中描述的技术的其他特征、目标和优点将是显而易见的。
25、短语“至少一个”、“一个或多个”以及“和/或”是在操作中具有连接性和分离性两者的开放式表述。例如,表述“a、b和c中的至少一个”、“a、b或c中的至少一个”、“a、b和c中的一个或多个”、“a、b或c中的一个或多个”以及“a、b和/或c”意指仅a、仅b、仅c、a和b一起、a和c一起、b和c一起,或a、b和c一起。当上述表述中的a、b和c中的每一个都指代诸如x、y和z的一个元素或诸如x1-xn、y1-ym和z1-zo的一类元素时,短语意指选自x、y和z的单个元素、选自同一类的元素(例如x1和x2)的组合以及选自两个或更多类的元素(例如y1和zo)的组合。
26、术语“一(a/an)”实体指所述实体中的一个或多个。如此,术语“一(a/an)”、“一个或多个”和“至少一个”在本文中可以可互换地使用。还应当注意,术语“包括(comprising/including)”、和“具有”可以可互换地使用。
27、前述内容是本公开的简化概述以提供对本公开的一些方面的理解。本
技术实现要素:
既不是对本公开和其各个方面、实施方案和配置的广泛性概述也不是详尽性概述。其既不旨在识别本公开的关键或重要要素,也不旨在描绘本公开的范围,而是以简化形式呈现本公开的所选概念,作为对下文呈现的更详细描述的介绍。如应了解,本公开的其他方面、实施方案和配置可能单独或以组合方式利用上文所阐述或下文所详细描述的特征中的一个或多个。
28、在考虑下文提供的实施方案描述之后,本发明的许多额外特征和优点对于本领域技术人员将变得显而易见。
技术特征:
1.一种用于生成经校正图像的方法,包括:
2.根据权利要求1所述的方法,还包括接收具有所述信息的外科手术计划。
3.根据权利要求1所述的方法,其中计算所述成像装置的所述多个位姿包括计算保持所述成像装置的机器人臂的运动,所述机器人臂具有至少五个运动自由度。
4.根据权利要求3所述的方法,其中所述成像装置利用x射线。
5.根据权利要求1所述的方法,其中识别所述一组饱和区域和所述一组不饱和区域使用特征辨别、机器学习或基于阈值的算法。
6.根据权利要求1所述的方法,其中所述信息包括所述物体的至少一个尺寸。
7.根据权利要求1所述的方法,其中生成所述经校正图像进一步基于与所述图像集中的每个图像相对应的所述位姿。
8.根据权利要求1所述的方法,其中所述物体包括多个物体。
9.根据权利要求1所述的方法,其中计算所述多个位姿以获得所述经校正图像中的所述解剖元件的每个部分的无遮挡视图。
10.一种用于生成经校正图像的方法,包括:
11.根据权利要求10所述的方法,还包括:
12.根据权利要求10所述的方法,还包括:
13.根据权利要求10所述的方法,还包括:
14.根据权利要求13所述的方法,其中所述机器人臂具有至少五个运动自由度。
15.根据权利要求13所述的方法,其中所述信息包括所述至少一个物体的至少一个尺寸。
16.根据权利要求13所述的方法,其中计算所述多个位姿以获得所述解剖元件的每个部分的无遮挡视图。
17.根据权利要求10所述的方法,其中识别所述一组饱和区域和所述一组不饱和区域包括使用特征辨别、机器学习或基于阈值的算法中的至少一者。
18.根据权利要求10所述的方法,其中所述物体是金属物体。
19.根据权利要求10所述的方法,其中所述物体包括多个物体。
20.一种用于生成经校正图像的系统,包括:
21.根据权利要求20所述的系统,其中所述机器人臂具有至少五个运动自由度。
22.根据权利要求20所述的系统,其中所述存储器存储用于由所述至少一个处理器执行的附加指令,所述指令被执行时进一步使得所述至少一个处理器:
技术总结
提供了一种用于生成经校正图像的系统和方法。可基于关于患者解剖结构内的物体的信息来计算成像装置的多个位姿。可在该多个位姿中的每个位姿处从该成像装置接收图像以产生图像集。每个图像可以描绘患者的解剖元件和物体的至少一部分。可以在该图像集中的图像中识别其中该物体已经引起饱和衰减的一组饱和区域以及其中该物体没有引起饱和衰减的一组不饱和区域。可以通过组合来自该一组不饱和区域的数据来生成经校正图像,该经校正图像描绘了解剖特征,该解剖特征具有比该一组饱和区域中的所有饱和区域更少的饱和区域。
技术研发人员:D·朱尼奥
受保护的技术使用者:马佐尔机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!