用于路段绘制的系统和方法与流程
本公开总体上涉及自主车辆导航。
背景技术:
1、随着技术的不断进步,能够在行车道上导航的全自主车辆的目标即将到来。自主车辆可能需要考虑多种因素,并基于这些因素做出适当的决策,以便安全且准确地到达预定目的地。例如,自主车辆可能需要处理和解释视觉信息(例如,从相机捕获的信息),并且还可能使用从其它来源(例如,从gps设备、速度传感器、加速度计、悬架传感器等)获得的信息。同时,为了导航到目的地,自主车辆可能还需要识别其在特定行车道内的地点(例如,多车道道路内的特定车道)、与其它车辆并排导航、避开障碍物和行人、遵守交通信号和标志,并在适当的交叉路口或交汇处从一条道路行驶到另一条道路。利用和解释自主车辆在车辆行驶至其目的地时收集的大量信息带来了众多设计挑战。自主车辆可能需要分析、访问和/或存储的大量数据(例如,捕获的图像数据、地图数据、gps数据、传感器数据等)带来了挑战,这些挑战实际上可能限制甚至不利地影响自主导航。此外,如果自主车辆依赖传统的绘制技术进行导航,那么存储和更新地图所需的大量数据会带来艰巨的挑战。
技术实现思路
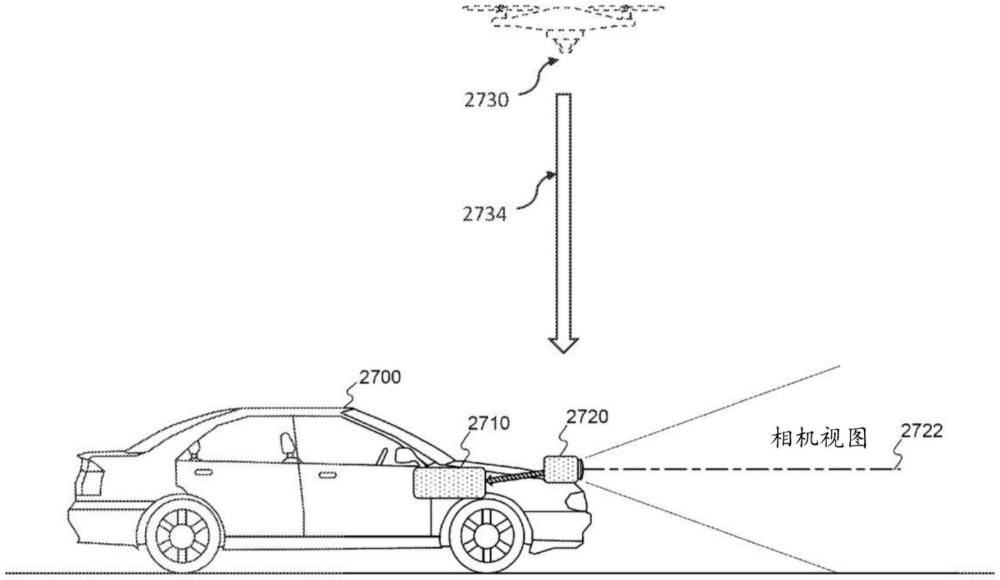
1、在实施例中,一种用于自动绘制路段的系统可以包括:至少一个处理器,被编程为:从安装在车辆上的至少一个相机接收当车辆穿过路段时获取的多个图像;将所述多个图像中的每个图像转换成对应的俯视图图像以提供多个俯视图图像;聚合所述多个俯视图图像以提供路段的聚合的俯视图图像;分析聚合的俯视图图像以识别与路段相关联的至少一个道路特征;相对于聚合的俯视图图像自动注释至少一个道路特征;以及将包括注释的至少一个道路特征的聚合的俯视图图像输出到至少一个存储器。
2、与其它公开的实施例一致,非暂态计算机可读存储介质可以存储程序指令,该程序指令由至少一个处理设备执行并且执行本文描述的任何方法。
3、前面的一般描述和下面的详细描述仅是示例性和解释性的,而不是对权利要求的限制。
技术特征:
1.一种用于自动绘制路段的系统,所述系统包括:
2.如权利要求1所述的系统,其中所述至少一个相机具有远离所述车辆突出的光轴。
3.如权利要求1所述的系统,其中所述多个俯视图图像中的每个俯视图图像基于相对于所述至少一个相机的实际高度升高的模拟视点而生成。
4.如权利要求3所述的系统,其中所述模拟视点相对于所述相机的所述实际高度升高至少十米。
5.如权利要求3所述的系统,其中所述模拟视点相对于所述相机的所述实际高度升高十米至二十米之间。
6.如权利要求3所述的系统,其中与所述模拟视点相关联的光轴垂直于与所述路段相关联的道路表面。
7.如权利要求1所述的系统,其中所述多个俯视图图像中的每个俯视图图像通过将由所述至少一个相机从所述至少一个相机的视点捕获的图像变形到相对于所述至少一个相机升高并沿着垂直于路段表面的线引导的模拟相机视点来生成。
8.如权利要求1所述的系统,其中所述至少一个相机包括相对于车辆的前向相机。
9.如权利要求1所述的系统,其中所述至少一个相机包括相对于车辆的侧面相机。
10.如权利要求1所述的系统,其中所述至少一个相机包括相对于车辆的后向相机。
11.如权利要求1所述的系统,其中所述多个俯视图图像的聚合包括:识别并关联相对于所述多个俯视图图像的多个特征点,以及基于关联的特征点并且基于所述车辆的所跟踪的自我运动确定所述多个俯视图图像的相对对齐。
12.如权利要求11所述的系统,其中所述多个俯视图图像的聚合包括确定所述多个特征点中的每个特征点相对于路段的位置。
13.如权利要求12所述的系统,其中使用来自运动计算的结构来确定所述多个特征点中的每个特征点的位置。
14.如权利要求1所述的系统,其中所述多个俯视图图像的聚合包括图像分割过程,其中对所述多个俯视图图像中表示的对象进行识别和分类。
15.如权利要求14所述的系统,其中所述多个俯视图图像的聚合包括从所述聚合的俯视图图像中省略来自所述多个俯视图图像中的一个或多个俯视图图像的经由所述图像分割过程被确定为表示车辆的至少一部分的像素。
16.如权利要求1所述的系统,其中所述多个俯视图图像的聚合包括从所述聚合的俯视图图像中省略来自所述多个俯视图图像中的一个或多个俯视图图像的被确定为表示移动对象的至少一部分的像素。
17.如权利要求1所述的系统,其中所述多个俯视图图像中的第一俯视图图像和第二俯视图图像至少部分地在重叠区域中重叠,并且其中所述多个俯视图图像的聚合包括将来自第一俯视图图像的驻留在所述重叠区域中的至少一些像素和来自第二俯视图图像的驻留在所述重叠区域中的至少一些像素合并到所述聚合的俯视图图像中。
18.如权利要求1所述的系统,其中所述多个俯视图图像中的第一俯视图图像、第二俯视图图像和第三俯视图图像至少部分地在重叠区域中重叠,并且其中所述多个俯视图图像的聚合包括将来自第一俯视图图像的驻留在重叠区域中的至少一些像素、来自第二俯视图图像的驻留在重叠区域中的至少一些像素,以及来自第三俯视图图像的驻留在重叠区域中的至少一些像素合并到所述聚合的俯视图图像中。
19.如权利要求1所述的系统,其中所述至少一个道路特征的自动注释由经过训练的神经网络执行。
20.如权利要求1所述的系统,其中所述至少一个道路特征包括道路表面。
21.如权利要求1所述的系统,其中所述至少一个道路特征包括车道标记。
22.如权利要求1所述的系统,其中所述至少一个道路特征包括道路边缘。
23.如权利要求1所述的系统,其中所述至少一个道路特征包括可行驶路径。
24.如权利要求23所述的系统,其中所述可行驶路径与合并车道相关联。
25.如权利要求23所述的系统,其中所述可行驶路径与出口车道相关联。
26.如权利要求23所述的系统,其中所述可行驶路径与交叉路口相关联。
27.如权利要求23所述的系统,其中所述可行驶路径与人行横道相关联。
28.如权利要求1所述的系统,其中所述至少一个道路特征包括连接两个或更多个不连续车道标记的虚拟车道标记。
29.如权利要求1所述的系统,其中所述至少一个道路特征包括交通灯。
30.如权利要求1所述的系统,其中所述至少一个道路特征包括杆。
31.如权利要求1所述的系统,其中所述至少一个道路特征包括交通标志。
32.如权利要求1所述的系统,其中所述至少一个道路特征包括树。
33.如权利要求1所述的系统,其中所述至少一个道路特征包括建筑物。
34.如权利要求1所述的系统,其中所述至少一个处理器还被编程为将所述聚合的俯视图图像转换成一系列帧视图图像,每个帧视图图像包括所述至少一个道路特征的至少一部分的表示,并且其中所述聚合的俯视图图像中表示的所述至少一个道路特征的注释被变换成所述一系列帧视图图像中的每个帧视图图像。
35.如权利要求1所述的系统,其中所述至少一个处理器还被编程为基于存储到所述至少一个存储器的所述聚合的俯视图图像来生成至少一个导航地图。
36.如权利要求1所述的系统,其中所述至少一个处理器还被编程为将所述聚合的俯视图图像与基于在路段的早期穿越期间从多个车辆收集的轨迹生成的可行驶路径重叠。
37.如权利要求35所述的系统,其中所述可行驶路径被表示为3d样条。
38.如权利要求1所述的系统,其中所述多个图像是由包括在多个不同车辆上的相机在所述多个不同车辆中的每个车辆穿过路段时获取的。
39.如权利要求37所述的系统,其中所述多个图像基于收集到的与所述不同车辆中的每个车辆相关联的自我运动来对齐。
技术总结
一种用于自动绘制路段的系统可以包括:至少一个处理器,被编程为:从安装在车辆上的至少一个相机接收当车辆穿过路段时获取的多个图像;将多个图像中的每个图像转换成对应的俯视图图像以提供多个俯视图图像;聚合多个俯视图图像以提供路段的聚合的俯视图图像;分析聚合的俯视图图像以识别与路段相关联的至少一个道路特征;自动注释相对于聚合的俯视图图像的至少一个道路特征;以及将包括注释的至少一个道路特征的聚合的俯视图图像输出到至少一个存储器。
技术研发人员:A·费伦茨,O·扎凯,R·弗伦克尔-莱维,R·乌尔巴赫,Y·赖斯
受保护的技术使用者:御眼视觉技术有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!