自移动设备的标定方法、系统和自移动设备与流程
本发明属于机器人,具体涉及一种自移动设备的标定方法、系统和自移动设备。
背景技术:
1、相关技术中,许多自移动设备会布设有摄像装置。自移动设备可以利用摄像装置拍摄图像,再结合预先存储的对应的外参完成诸如辅助定位等数据处理。
2、但是,在生产装配以及日常使用过程中,摄像装置相对自移动机器人的实际位置很容易会发生变化,导致摄像装置的实际位置参数已经不再符合预先存储的对应的外参。这种情况下,如果继续利用该相机拍摄图片,并结合预先存储的对应的外参进行数据处理,很容易出现误差,进而对自移动机器人的工作产生影响。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的技术问题是提供一种能够准确地判断是否需要调整摄像装置的位置参数的自移动设备的标定方法、系统和自移动设备。
2、为解决上述技术问题,本说明书实施例提供一种自移动设备的标定方法,所述方法包括:
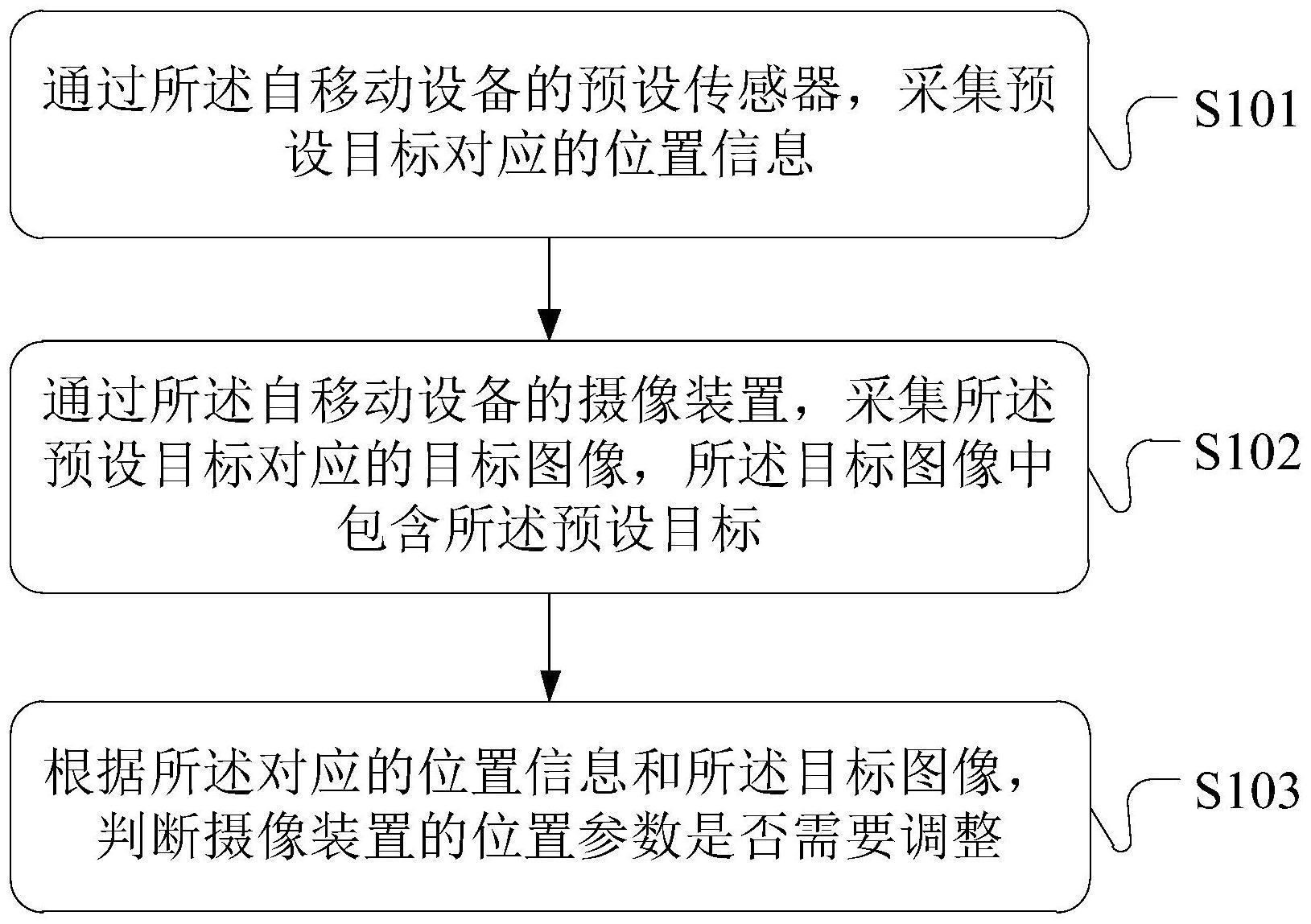
3、通过所述自移动设备的预设传感器,采集预设目标对应的位置信息;
4、通过所述自移动设备的摄像装置,采集所述预设目标对应的目标图像,所述目标图像中包含所述预设目标;
5、根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整。
6、在一个实施例中,所述通过所述自移动设备的预设传感器,采集预设目标对应的位置信息,包括:
7、通过所述预设传感器向所述预设目标发送激光信号,以便所述激光信号照射至所述预设目标后返回相应的反射信号;
8、根据所述反射信号生成所述预设目标对应的点云数据,并根据所述点云数据确定所述预设目标对应的位置信息;
9、相应的,所述通过所述自移动设备的摄像装置,采集所述预设目标对应的目标图像,包括:
10、通过所述自移动设备的摄像装置,采集所述预设目标对应的目标图像,其中,所述目标图像包含所述激光信号在所述预设目标上形成的第一图形。
11、在一个实施例中,所述根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整,包括:
12、根据预设的坐标转换关系,将所述点云数据投射至所述目标图像并形成第二图形;
13、根据所述第一图形与第二图形之间的偏差值,判断摄像装置的位置参数是否需要调整。
14、在一个实施例中,所述激光信号包括:线型激光束,所述第一图形包括第一线段,所述第二图形包括第二线段。
15、在一个实施例中,在根据预设的坐标转换关系,将所述点云数据投射至所述目标图像并形成第二图形之后,所述方法还包括:
16、确定第一线段的第一端点和第二端点在目标图像中的位置坐标;确定第二线段的第一端点和第二端点在目标图像中的位置坐标;
17、根据第一线段的第一端点和第二端点在目标图像中的位置坐标,和第二线段的第一端点和第二端点在目标图像中的位置坐标,计算得到所述第一图形与第二图形之间的偏差值。
18、在一个实施例中,根据所述第一图形与第二图形之间的偏差值,判断摄像装置的位置参数是否需要调整,包括:
19、比较所述偏差值与预设的偏差阈值,得到对应的比较结果;
20、根据所述比较结果,在确定所述偏差值大于预设的偏差阈值的情况下,确定摄像装置的位置参数需要调整。
21、在一个实施例中,在确定摄像装置的位置参数需要调整的情况下,所述方法还包括:
22、根据所述偏差值,调整摄像装置相对自移动设备的相对位置,以与预设的相机外参匹配。
23、在一个实施例中,根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整,还包括:
24、根据目标图像和预设的相机地图坐标系,确定出第一图形的位置坐标;其中,所述预设的相机地图坐标系为根据预设的相机外参构建的;
25、根据点云数据和预设的激光地图坐标系,确定出点云数据所对应的位置坐标;
26、根据所述第一图形的位置坐标和所述点云数据所对应的位置坐标,判断摄像装置的位置参数是否需要调整。
27、本说明书实施例还提供了一种自移动设备的标定系统,包括:
28、第一采集模块,用于通过所述自移动设备的预设传感器,采集预设目标对应的位置信息;
29、第二采集模块,用于通过所述自移动设备的摄像装置,采集所述预设目标对应的目标图像,所述目标图像中包含所述预设目标;
30、判断模块,用于根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整。
31、本说明书实施例还提供了一种自移动设备,包括:
32、设备主体,所述设备主体还设置有预设传感器、摄像装置和控制器;
33、其中,所述控制器用于:
34、控制预设传感器采集预设目标对应的位置信息;
35、控制摄像装置采集所述预设目标对应的目标图像,所述目标图像中包含所述预设目标;
36、所述控制器还用于根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整。
37、基于本说明书提供的自移动设备的标定方法、系统和自移动设备,具体实施时,可以先通过所述自移动设备的预设传感器,采集预设目标对应的诸如点云数据等位置信息;同时通过所述自移动设备的相机等摄像装置,采集所述预设目标对应的目标图像,所述目标图像中包含所述预设目标;再根据对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整。从而能够较为高效、便捷地自动检测出自移动设备的摄像装置的位置参数是否准确,并准确地判断是否需要调整摄像装置的位置参数,避免在摄像装置的实际位置参数已经不再符合对应的外参的情况下继续使用摄像装置所拍摄的图像来参与定位等数据处理所引入的误差。
技术特征:
1.一种自移动设备的标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的自移动设备的标定方法,其特征在于,所述通过所述自移动设备的预设传感器,采集预设目标对应的位置信息,包括:
3.根据权利要求2所述的自移动设备的标定方法,其特征在于,所述根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整,包括:
4.根据权利要求3所述的自移动设备的标定方法,其特征在于,所述激光信号包括:线型激光束,所述第一图形包括第一线段,所述第二图形包括第二线段。
5.根据权利要求4所述的自移动设备的标定方法,其特征在于,在根据预设的坐标转换关系,将所述点云数据投射至所述目标图像并形成第二图形之后,所述方法还包括:
6.根据权利要求3-5中任一项所述的自移动设备的标定方法,其特征在于,根据所述第一图形与第二图形之间的偏差值,判断摄像装置的位置参数是否需要调整,包括:
7.根据权利要求6所述的自移动设备的标定方法,其特征在于,在确定摄像装置的位置参数需要调整的情况下,所述方法还包括:
8.根据权利要求1-5中任一项所述的自移动设备的标定方法,其特征在于,根据所述对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整,还包括:
9.一种自移动设备的标定系统,其特征在于,包括:
10.一种自移动设备,其特征在于,包括:
技术总结
本发明公开了一种自移动设备的标定方法、系统和自移动设备。具体实施时,可以先通过所述自移动设备的预设传感器,采集预设目标对应的诸如点云数据等位置信息;同时通过所述自移动设备的相机等摄像装置,采集所述预设目标对应的目标图像,所述目标图像中包含所述预设目标;再根据对应的位置信息和所述目标图像,判断摄像装置的位置参数是否需要调整。从而能够较为高效、便捷地自动检测出自移动设备的摄像装置的位置参数是否准确,并及时判断是否需要调整摄像装置的位置参数。
技术研发人员:程立业,薄慕婷,邬芮璠
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!