一种基于web的HMI机器人系统的制作方法
一种基于web的hmi机器人系统
技术领域
1.本发明涉及机器人技术领域,具体为一种基于web的hmi机器人系统。
背景技术:
2.在机器人制造行业中,hmi人机界面操作是其中不可缺失的环节,在目前的技术中,hmi人机界面操作的常常通过qt、wpf等技术开发,qt与wpf技术人员不是很多,薪资很高,而且学习成本也很高,开发周期也很长,效率不高,比如:c++没有垃圾收回机制,开发人员要小心翼翼地控制内存泄漏,c++语言特性繁多且复杂,学习曲线陡峭,需要针对不同平台进行编译,而wpf学习成本与开发效率相对于web还是比较高,并且不能跨平台开发。现有的方式是采用传统hmi开发以及操作方式,如图1和图2所示。而上述流程中,图1中,操作很单一,客户必须到工控机上操作。图2中,开发人员类似瀑布开发模式,必须先开发界面,再开发后台等其他功能,不能够同步开发,开发人员往往是全栈工程师。功能复用性不高,尤其是界面,新的需求可能就需要重新开发功能。
3.而目前很多机器人的hmi都是基于桌面系统开发,也有一些非机器人行业基于web开发的一套hmi系统。随着web应用大型其道,web前端开发领域的技术生态足够繁荣,发布到npmjs.com平台上的模块已经超过90万个,覆盖领域广,优秀模块繁荣多且非常方便。
技术实现要素:
4.针对现有机器人行业开发hmi用人成本高,开发效率低,学习成本高的技术问题,本发明提出了一种基于web的hmi机器人系统。
5.本发明所要解决的技术问题采用以下技术方案来实现:
6.一种基于web的hmi机器人系统,包括:
7.前端核心框架,所述前端核心框架包括vue框架,所述vue框架内引用了3d框架,所述vue框架包括vue和自研数据驱动引擎;
8.后端技术架构,所述后端技术架构包括服务请求层、服务逻辑层、后台资源接口层、后台资源层;
9.所述前端核心框架通过服务请求层向所述后端技术架构发出服务请求以及通过服务请求层接收服务请求。
10.优选地,所述vue框架还包括自研基础ui控件、扩展ui控件、图表控件、结构图、ui架构器、自研前端数据结构控件。
11.优选地,所述ui架构器包括自研循环、if表格、表单、树形容器、数据绑定机制。
12.优选地,所述3d框架包括2dcanvas画布控件、3d世界控件、全景容器控件。
13.优选地,所述2dcanvas画布控件包括物理世界控件和骨骼动画控件。
14.优选地,所述服务请求层位于服务逻辑层的前端,用于负责接收、发送服务请求,由python程序构成。
15.优选地,所述服务逻辑层包括默认服务和自定义服务,所述默认服务和自定义服
务之间通过rpc相互调用。
16.优选地,所述后台资源层通过后台资源接口层与服务逻辑层连接,所述后台资源层连接有设备通用接口,所述后台资源层包括数据库、通用算法库、socke.io。
17.本发明的有益效果是:
18.本发明实现了后端统一的api与sdk设计,采用了前后端分离模式。每块都是独立的,如果客户只是界面布局的要求,那么通过本发明,只需要修改前端即可。同理前端不变,可以只开发业务或者算法实现。本发明提供了市场没有实现统一的hmi解决方案复用的可能,不同客户使用相同hmi成为了可能,开发人员基于hmi快速开发成为了可能,基本上满足市场为了降低开发难度与成本,提高开发效率的需求。丰富了hmi系统解决方案的生态社区。
附图说明
19.下面结合附图和实施例对本发明进一步说明:
20.图1为现有方式中采用传统hmi操作的示意框图;
21.图2为现有方式中采用传统hmi开发的示意框图;
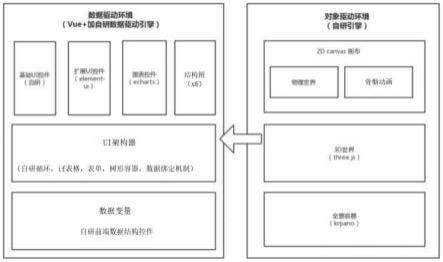
22.图3为本发明中前端核心框架的结构框图;
23.图4为本发明中后端技术架构的结构框图。
具体实施方式
24.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
25.如图3至图4所示,一种基于web的hmi机器人系统,主要由前端核心框架和后端技术架构两部分构成。其中,所述前端核心框架包括vue框架,在vue框架中部分内部模块使用了自研的对象驱动引擎,该架构包含自研基础ui控件、扩展ui控件、图表控件、结构图、ui架构器、自研前端数据结构控件,所述ui架构器自研循环、if表格、表单、树形容器、数据绑定机制;利用vue框架自身的特性,实现数据绑定,数据驱动,以及自研的数据结构控件。
26.所述vue框架内引用了3d框架,所述3d框架包括2dcanvas画布控件、3d世界控件、全景容器控件,所述2dcanvas画布控件包括物理世界控件和骨骼动画控件,模仿物理世界,实现实体机器人与3d机器人实时的关联,同时封装了element-ui组件,也可以同时打包为其他类型的前端应用。
27.本发明中,基于前端低代码技术通过自己研发的组件(通用组件与业务组件),实现组件自定义属性与自定义布局等功能适配不同开发需求,提高开发效率,降低开发成本。
28.所述后端技术架构包括服务请求层、服务逻辑层、后台资源接口层、后台资源层。其中,所述服务请求层用于前端核心框架向后端技术架构发出服务请求以及接收服务请求。所述服务请求层位于服务逻辑层的前端,由python程序构成。
29.所述服务逻辑层为核心服务逻辑处理,包括默认服务和自定义服务,所述默认服务和自定义服务之间通过rpc相互调用。所述默认服务即在编辑器服务组件中定义的业务逻辑,这一部分逻辑,目前是由js定义,然后进一步编译为静态页面程序在后台运行。所述自定义服务即需要先定义后台自定义组件,组件编译后,会以python服务的方式来运行。
30.所述后台资源层通过后台资源接口层与服务逻辑层连接,所述后台资源层连接有设备通用接口,所述后台资源层包括数据库、通用算法库、socke.io。所述后台资源层还引用了自研一些封装的库,动态sdk,有个别的库会用到网络编程技术,通过网络进行数据的传输与硬件设备的io操作。
31.本发明中,基于动态库sdk技术,针对机器人各种算法,功能模块,抽象统一的接口,通过运行服务适配不同平台的接口,实现跨平台以及适配不同设备相同功能。基于tcp网络编程技术,自订协议。实现订阅,监听,设置设备等功能以及可以通过web对设备进行配置,监控等操作。
32.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种基于web的hmi机器人系统,其特征在于:包括:前端核心框架,所述前端核心框架包括vue框架,所述vue框架内引用了3d框架,所述vue框架包括vue和自研数据驱动引擎;后端技术架构,所述后端技术架构包括服务请求层、服务逻辑层、后台资源接口层、后台资源层;所述前端核心框架通过服务请求层向所述后端技术架构发出服务请求以及通过服务请求层接收服务请求。2.根据权利要求1所述的一种基于web的hmi机器人系统,其特征在于:所述vue框架还包括自研基础ui控件、扩展ui控件、图表控件、结构图、ui架构器、自研前端数据结构控件。3.根据权利要求2所述的一种基于web的hmi机器人系统,其特征在于:所述ui架构器包括自研循环、if表格、表单、树形容器、数据绑定机制。4.根据权利要求1所述的一种基于web的hmi机器人系统,其特征在于:所述3d框架包括2dcanvas画布控件、3d世界控件、全景容器控件。5.根据权利要求4所述的一种基于web的hmi机器人系统,其特征在于:所述2dcanvas画布控件包括物理世界控件和骨骼动画控件。6.根据权利要求1所述的一种基于web的hmi机器人系统,其特征在于:所述服务请求层位于服务逻辑层的前端,用于负责接收、发送服务请求,由python程序构成。7.根据权利要求1所述的一种基于web的hmi机器人系统,其特征在于:所述服务逻辑层包括默认服务和自定义服务,所述默认服务和自定义服务之间通过rpc相互调用。8.根据权利要求7所述的一种基于web的hmi机器人系统,其特征在于:所述后台资源层通过后台资源接口层与服务逻辑层连接,所述后台资源层连接有设备通用接口,所述后台资源层包括数据库、通用算法库、socke.io。
技术总结
本发明涉及机器人技术领域,具体为一种基于web的HMI机器人系统,包括:前端核心框架,所述前端核心框架包括Vue框架,所述Vue框架内引用了3D框架,所述Vue框架包括Vue和自研数据驱动引擎;后端技术架构,所述后端技术架构包括服务请求层、服务逻辑层、后台资源接口层、后台资源层;所述前端核心框架通过服务请求层向所述后端技术架构发出服务请求以及通过服务请求层接收服务请求。本发明提供了市场没有实现统一的HMI解决方案复用的可能,不同客户使用相同HMI成为了可能,开发人员基于HMI快速开发成为了可能,基本上满足市场为了降低开发难度与成本,提高开发效率的需求。丰富了HMI系统解决方案的生态社区。决方案的生态社区。决方案的生态社区。
技术研发人员:李浩来 李其明 周小文 冯超 沈铭元 李会欣 孟庭伟 刘梦梦 单勇 唐栋
受保护的技术使用者:埃夫特智能装备股份有限公司
技术研发日:2022.03.29
技术公布日:2022/8/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1