基于体况评分的奶牛分类系统的制作方法
1.本发明涉及奶牛养殖设施技术领域,特别涉及一种基于体况评分的奶牛分类系统。
背景技术:
2.了奶牛养殖产业的集约化、规模化发展。而科学的管理方式是集约化、规模化发展的基石。例如,分类管理,根据奶牛的不同体况进行差别养殖。
3.现有技术中,关于奶牛的体况判断都是由人工评判完成,亦既,由受过专业培训且具有相关评分经验的评分人员对奶牛相关部位进行观察分析给出分数,打分采取5分制,低分表示消瘦,高分表示肥胖,以0.25为打分单位。在人工完成体况评分后,再根据分数将奶牛分群饲养。传统的人工评分方法不但耗时,而且评分人员主观因素会影响评分的准确性。
技术实现要素:
4.有鉴于此,针对上述不足,有必要提出一种客观、便捷的基于体况评分的奶牛分类系统。
5.一种基于体况评分的奶牛分类系统,包括奶牛体况评价装置,所述奶牛体况评价装置包括深度图像获取模块、标记模块、第一提取模块、第二提取模块、计算模块、评价模块,所述深度图像获取模块用于从奶牛的上方获取反映奶牛背部轮廓的背部深度图像,并将背部深度图像提供给标记模块,所述标记模块用于在背部深度图像上标记数个关键点body_d、body_c、body_h、body_g、body_f、body_e,其中,body_d、body_c为奶牛盆骨两个点,body_h、body_g为奶牛后胯骨两个点,body_f、body_e为奶牛两个v点,所述v点是荐骨和坐骨之间的一个点,并位于牛后腿的上方,所述第一提取模块用于读取背部深度图像上的每一个关键点平面信息,所述平面信息为关键点的x坐标和y坐标,并将每一个关键点的平面信息提供给计算模块,所述第二提取模块用于读取背部深度图像上的关键点深度信息,所述深度信息为关键点的z坐标,并将每一个关键点的深度信息提供给计算模块,所述计算模块用于计算body_d和body_h两点连线的中点body_f
′
的z坐标和body_c和body_g两点连线的中点body_e
′
的z坐标,所述评价模块根据公式一或公式二获得奶牛的体况评分bcs,
[0006][0007][0008]
其中,δ为为校正系数,|ze|为关键点body_e的z坐标值的绝对值,|ze′
|为关键点body_e
′
的z坐标值的绝对值,|zf|为关键点body_f的z坐标值的绝对值,|zf′
|为关键点body_f
′
的z坐标值的绝对值。
[0009]
优选地,所述基于体况评分的奶牛分类系统还包括称重通道、称重装置、分类通道,所述称重装置设于称重通道内,用于称量称重通道内奶牛的体重,所述称重通道的出口
与分类通道的入口连接,所述分类通道包括第一分类口、第二分类口、第三分类口,在第二分类口设置左分类门,在第三分类口设置右分类门,左分类门开启,第一分类口和第三分类口关闭,第二分类口打开,右分类门开启,第一分类口和第二分类口关闭,第三分类口打开,左分类门和右分类门闭合,第一分类口打开,第二分类口和第三分类口关闭。
[0010]
优选地,所述称重通道包括称重围栏、门框,所述门框与称重围栏连接,所述基于体况评分的奶牛分类系统还包括旋转门机构,所述旋转门机构设置在称重通道的出口或称重通道的入口,所述旋转门机构包括门体、拉杆、滑块,所述门体与门框转动连接,所述拉杆的一端与门体转动连接,所述拉杆的另一端与滑块转动连接,所述滑块可沿称重围栏的长度方向直线往复移动。
[0011]
优选地,所述旋转门机构还包括引导机构,所述引导机构包括弧形导轨、滚轮架、滚轮组,所述弧形导轨固设于门框上,所述滚轮架与拉杆转动连接,所述滚轮架与门体连接,所述滚轮组设于滚轮架上,所述滚轮组与滚轮架转动连接,所述滚轮组与弧形导轨滚动配合。
[0012]
优选地,所述引导机构还包括直线往复驱动机构,所述直线往复驱动机构包括机壳、丝杆、电机,所述机壳固设于门框上,所述滑块与机壳滑动配合,所述丝杆与机壳转动连接,所述滑块上设有螺孔,所述丝杆与螺孔螺纹连接,以通过丝杆转动驱动滑动沿机壳的直线往复移动,所述电机固设于机壳上,所述电机的输出端与丝杆同轴连接。
[0013]
优选地,所述基于体况评分的奶牛分类系统还包括奶牛夹紧机构,所述奶牛夹紧机构包括两个相对平行设置的夹板以及奶牛夹紧组件,所述奶牛夹紧组件驱动两个夹板同步相互靠近或远离。
[0014]
优选地,所述奶牛夹紧组件包括第一支撑杆、第二支撑杆、滑杆、第一滑座、第二滑座、第一连杆、第三连杆、第四连杆、第五连杆、第六连杆、第七连杆、第九连杆,所述第一支撑杆和第二支撑杆固设于门框上,所述滑杆的两端分别与第一支撑杆和第二支撑杆连接,所述第一滑座和第二滑座可沿滑杆移动,两个夹板分别固设在第一滑座和第二滑座上,所述第一连杆的一端与第一滑座转动连接,所述第一连杆的另一端与第三连杆的一端转动连接,所述第三连杆的另一端与第一支撑杆转动连接,所述第四连杆的一端与第三连杆靠近第一支撑杆的一端固定连接,所述第四连杆的另一端与第五连杆的一端转动连接,所述第五连杆的另一端与第六连杆的一端转动连接,所述第六连杆的另一端与第二支撑杆转动连接,所述第七连杆的一端与第六连杆靠近第二支撑杆的一端固定连接,所述第七连杆的另一端与第九连杆的一端转动连接,所述第九连杆的另一端与第二滑座转动连接。
[0015]
优选地,所述奶牛夹紧组件还包括压杆,所述压杆的一端与第七连杆的中部固定连接,所述压杆的另一端为自由端。
[0016]
优选地,所述基于体况评分的奶牛分类系统还包括自锁机构,在称重围栏上设有长条孔,在长条孔内设有数个自锁机构,所述自锁机构沿长条孔的长度方向均布,所述自锁机构受力后,可相对称重围栏单向转动,所述自锁机构不受力时可自动复位。
[0017]
优选地,所述自锁机构包括固定柱、转动柄、复位弹簧,所述固定柱固设于长条孔上部的称重围栏上,所述转动柄的下端与长条孔下部的称重围栏转动连接,所述转动柄的上端延伸至超过固定柱水平高度,所述复位弹簧的一端与称重围栏固定连接,所述复位弹簧的另一端与转动柄固定连接。
[0018]
与现有技术相比,本发明的有益效果在于:
[0019]
利用深度图像获取模块从奶牛的上方稳定的获取反映奶牛背部轮廓的背部深度图像,根据实际生产中总结的能体现奶牛背部特征的关键点,从背部深度图像中标记出对应的关键点,以body_c、body_g或者body_d、body_h两点之间的中分点为标准,将body_e点或body_f点与中分点进行比较,申请人发现,body_e点或body_f点与中分点的距离比值作为奶牛体况评分基准,既客观,又便捷。
附图说明
[0020]
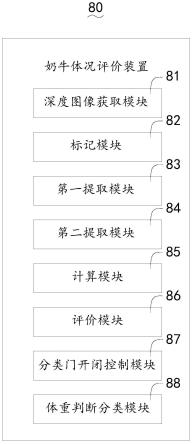
图1为所述牛体况评价装置的功能模块示意图。
[0021]
图2为所述深度图像获取模块安装位置示例。
[0022]
图3为奶牛的背部深度图像的关键点确定示意图。
[0023]
图4为所述基于体况评分的奶牛分类系统的轴测图。
[0024]
图5为所述旋转门机构的轴测图。
[0025]
图6为所述旋转门机构的局部视图。
[0026]
图7为所述夹紧机构第一角度的轴测图。
[0027]
图8为所述夹紧机构第二角度的轴测图。
[0028]
图9为所述夹自锁机构的轴测图。
[0029]
图中:称重通道10、称重围栏11、门框12、称重装置20、分类通道30、左分类门31、右分类门32、外接通道40、旋转门机构50、门体51、拉杆52、滑块53、引导机构54、弧形导轨541、滚轮架542、滚轮组543、直线往复驱动机构55、机壳551、丝杆552、电机553、奶牛夹紧机构60、夹板61、奶牛夹紧组件62、第一支撑杆621、第二支撑杆622、滑杆623、第一滑座624、第二滑座625、第一连杆626、第三连杆627、第四连杆628、第五连杆629、第六连杆6210、第七连杆6211、第九连杆6212、第二连杆6212、第八连杆6213、第十连杆6214、第十一连杆6215、压杆6216、自锁机构70、固定柱71、转动柄72、复位弹簧73、奶牛体况评价装置80、深度图像获取模块81、标记模块82、第一提取模块83、第二提取模块84、计算模块85、评价模块86、分类门开闭控制模块87、体重判断分类模块88。
具体实施方式
[0030]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0031]
参见图1,本发明实施例提供了一种基于体况评分的奶牛分类系统,包括奶牛体况评价装置80,奶牛体况评价装置80包括深度图像获取模块81、标记模块82、第一提取模块83、第二提取模块84、计算模块85、评价模块86,深度图像获取模块81用于从奶牛的上方获取反映奶牛背部轮廓的背部深度图像,并将背部深度图像提供给标记模块82,标记模块82用于在背部深度图像上标记数个关键点body_d、body_c、body_h、body_g、body_f、body_e,其中,body_d、body_c为奶牛盆骨两个点,body_h、body_g为奶牛后胯骨两个点,body_f、body_e为奶牛两个v点,v点是荐骨和坐骨之间的一个点,并位于牛后腿的上方,第一提取模块83用于读取背部深度图像上的每一个关键点平面信息,平面信息为关键点的x坐标和y坐
标,并将每一个关键点的平面信息提供给计算模块85,第二提取模块84用于读取背部深度图像上的关键点深度信息,深度信息为关键点的z坐标,并将每一个关键点的深度信息提供给计算模块85,计算模块85用于计算body_d和body_h两点连线的中点body_f
′
的z坐标和body_c和body_g两点连线的中点body_e
′
的z坐标,评价模块86根据公式一或公式二获得奶牛的体况评分bcs,
[0032][0033][0034]
其中,δ为为校正系数,|ze|为关键点body_e的z坐标值的绝对值,|ze′
|为关键点body_e
′
的z坐标值的绝对值,|zf|为关键点body_f的z坐标值的绝对值,|zf′
|为关键点body_f
′
的z坐标值的绝对值。
[0035]
公式一或公式二中,δ是现实生产中工作人员根据实际生产经验确定的经验值。
[0036]
body_f
′
、body_e
′
的坐标:的坐标:
[0037]
深度图像获取模块81可以调取深度摄像机拍摄的深度图像,深度摄像机用于从奶牛上方拍摄奶牛背部轮廓的背部深度图像,上述关键点的z坐标的基准点为深度摄像机所在的水平高度,请参看图2,将深度摄像机放置在奶牛背部中心的正上方,采集奶牛背部深度图像,通过cocoannotator对背部深度图像进行关键点标记,如图3所示,其中,body_i为牛头,body_l为牛颈,body_j为尾骨,body_k为脊骨,body_a,body_b为奶牛前胯骨两个点,通过dcnv2网络进行关键点回归和关系回归,得到关键点预测模型,通过opencv加载预测模型,使用关键点检测算法,获得关键点坐标x、y,通过关键坐标和深度图像数据,获得关键点的深度值数据,从而获得关键点的坐标x、y、z。获得上述数据后,校验数据合法性,对误差数据进行纠正。
[0038]
除了通过上述公式一或公式二获得奶牛的体况评分bcs,还可以计算奶牛的体型数据,如通过body_k获得奶牛身高数据,body_i和body_j获得奶牛体长数据,body_c和body_d获得奶牛体宽数据,body_a和body_b获得前跨宽度数据,body_g和body_h获得后跨宽度数据。
[0039]
奶牛体况评价装置80可以是能够处理数据的微机,奶牛体况评价装置80运行了背部深度图像获取及完成体况评分bcs功能的计算机应用程序,产生了上述功能模块。在其他实施方式中,奶牛体况评价装置80所具备的上述功能也可以通过硬件逻辑电路及嵌入式代码来实现。
[0040]
与现有技术相比,本发明的有益效果在于:
[0041]
利用深度图像获取模块81从奶牛的上方稳定的获取反映奶牛背部轮廓的背部深度图像,根据实际生产中总结的能体现奶牛背部特征的关键点,从背部深度图像中标记出对应的关键点,以body_c、body_g或者body_d、body_h两点之间的中分点为标准,将body_e点或body_f点与中分点进行比较,申请人发现,body_e点或body_f点与中分点的距离比值
作为奶牛体况评分基准,既客观,又便捷。
[0042]
参见图4,进一步,基于体况评分的奶牛分类系统还包括称重通道10、称重装置20、分类通道30,称重装置20设于称重通道10内,用于称量称重通道10内奶牛的体重,称重通道10的出口与分类通道30的入口连接,分类通道30包括第一分类口、第二分类口、第三分类口,在第二分类口设置左分类门31,在第三分类口设置右分类门32,左分类门31开启,第一分类口和第三分类口关闭,第二分类口打开,右分类门32开启,第一分类口和第二分类口关闭,第三分类口打开,左分类门31和右分类门32闭合,第一分类口打开,第二分类口和第三分类口关闭。左分类门31、右分类门32分别通过电动机构驱动开启或闭合。
[0043]
实施例1:所述奶牛体况评价装置80还包括分类门开闭控制模块87,分类门开闭控制模块87根据所述评价模块86计算的体况评分bcs及预存的基准表来控制分类口,如表1所示。其中,基准表中包括基准体况评分bcs栏及与基准体况评分bcs栏对应的分类口。
[0044]
表1基准表
[0045]
bcs分类门打开组合方式分类口小于3左分类门31开启、右分类门32闭合第二分类口大于等于3左分类门31闭合、右分类门32开启第三分类口
[0046]
例如,分类门开闭控制模块87获得bcs为3、3.5、3.75、4,奶牛偏瘦,则第二分类口打开;分类门开闭控制模块87获得bcs为2.5、2.75,奶牛病态,则第三分类口打开。
[0047]
实施例2:所述奶牛体况评价装置80还包括体重判断分类模块88,称重装置20将位于称重通道中的奶牛的体重数据提供给体重判断分类模块88,体重判断分类模块88根据称重装置20提供的体重数据及预存的体重分类表来控制启停信号,进而深度图像获取模块81的运行或不运行,如表2所示。其中,体重分类表包括体重栏及与体重栏对应的启停信号。
[0048]
表2体重分类表
[0049]
体重深度图像获取模块81启停信号小于1000公斤运行1大于等于1000公斤不运行0
[0050]
例如,奶牛体重为1200公斤,奶牛偏胖,深度图像获取模块81获得启动信号0,不运行,奶牛体重为800公斤,深度图像获取模块81获得启动信号1,运行。对于偏胖的奶牛,不必计算bcs以进行分类,深度图像获取模块81不运行,第一分类口打开,直接进入第一分类口,以提高分类效率。只有偏瘦的奶牛才计算bcs,深度图像获取模块81运行,标记模块82、第一提取模块83、第二提取模块84、计算模块85、评价模块86依次运行,进行判断是否有病态奶牛,病态奶牛进入第三分类口,剩余的奶牛进入第二分类口。
[0051]
基于体况评分的奶牛分类系统还包括外接通道40,外接通道40的出口与称重通道10的入口连接。称重通道10由两个平行设置称重围栏11组成,在称重围栏11上设有侧门,侧门采用压入式安装。在称重通道10的底部设有第一奶牛脚踏板,可在第一奶牛脚踏板上设置电子秤,或者奶牛脚踏板本身作为电子秤,通过称重通道10外侧设置的显示器,实时显示奶牛的体重。分类通道30由两个平行设置分类围栏组成。外接通道40由两个平行设置外接围栏组成。在分类通道30的底部设置第二奶牛脚踏板,在称重通道10的入口设置入口脚踏板,在分类通道30出口设置出口脚踏板。
[0052]
参见图4和图5,进一步,称重通道10包括称重围栏11、门框12,门框12与称重围栏
11连接,基于体况评分的奶牛分类系统还包括旋转门机构,旋转门机构设置在称重通道10的出口或称重通道10的入口,旋转门机构包括门体51、拉杆52、滑块53,门体51与门框12转动连接,拉杆52的一端与门体51转动连接,拉杆52的另一端与滑块53转动连接,滑块53可沿称重围栏11的长度方向直线往复移动。
[0053]
参见图5和图6,进一步,旋转门机构还包括引导机构54,引导机构54包括弧形导轨541、滚轮架542、滚轮组543,弧形导轨541固设于门框12上,滚轮架542与拉杆52转动连接,滚轮架542与门体51连接,滚轮组543设于滚轮架542上,滚轮组543与滚轮架542转动连接,滚轮组543与弧形导轨541滚动配合。
[0054]
滚轮组543为两个轴线平行设置的滚轮本体,两个滚轮本体分别与弧形导轨541的两侧接触。
[0055]
参见图5,进一步,引导机构54还包括直线往复驱动机构55,直线往复驱动机构55包括机壳551、丝杆552、电机553,机壳551固设于门框12上,滑块53与机壳551滑动配合,丝杆552与机壳551转动连接,滑块53上设有螺孔,丝杆552与螺孔螺纹连接,以通过丝杆552转动驱动滑动沿机壳551的直线往复移动,电机553固设于机壳551上,电机553的输出端与丝杆552同轴连接。
[0056]
采用丝杆552的驱动方式,相比气缸,噪声小,可避免奶牛受到惊吓。
[0057]
参见图7和图8,进一步,基于体况评分的奶牛分类系统还包括奶牛夹紧机构60,奶牛夹紧机构60包括两个相对平行设置的夹板61以及奶牛夹紧组件62,奶牛夹紧组件62驱动两个夹板61同步相互靠近或远离。
[0058]
参见图7和图8,进一步,奶牛夹紧组件62包括第一支撑杆621、第二支撑杆622、滑杆623、第一滑座624、第二滑座625、第一连杆626、第三连杆627、第四连杆628、第五连杆629、第六连杆6210、第七连杆6211、第九连杆6212,第一支撑杆621和第二支撑杆622固设于门框12上,滑杆623的两端分别与第一支撑杆621和第二支撑杆622连接,第一滑座624和第二滑座625可沿滑杆623移动,两个夹板61分别固设在第一滑座624和第二滑座625上,第一连杆626的一端与第一滑座624转动连接,第一连杆626的另一端与第三连杆627的一端转动连接,第三连杆627的另一端与第一支撑杆621转动连接,第四连杆628的一端与第三连杆627靠近第一支撑杆621的一端固定连接,第四连杆628的另一端与第五连杆629的一端转动连接,第五连杆629的另一端与第六连杆6210的一端转动连接,第六连杆6210的另一端与第二支撑杆622转动连接,第七连杆6211的一端与第六连杆6210靠近第二支撑杆622的一端固定连接,第七连杆6211的另一端与第九连杆6212的一端转动连接,第九连杆6212的另一端与第二滑座625转动连接。
[0059]
在一个实施例中,第一支撑杆621和第二支撑杆622相互平行。夹紧机构为两组,两组夹紧机构通过第二连杆6212、第八连杆6213、第十连杆6214、第十一连杆6215连接,具体的,两个夹紧机构的第一连杆626、第三连杆627均转动连接在第二连杆6212上,两个夹紧机构的第七连杆6211、第九连杆6212均转动连接在第八连杆6213上,两个夹紧机构的第四连杆628、第五连杆629均转动连接在第十连杆6214上,两个夹紧机构的第五连杆629、第六连杆6210均转动连接在第十一连杆6215上。
[0060]
与第一滑座624或第二滑座625配合的滑杆623为两个,两个滑杆623相互平行,与每一个第一滑座624或第二滑座625内设置的滚轮为八个,对应一个滑杆623的滚轮为四个,
四个滚轮分两组,滑杆623的上下各设一组,每组两个滚轮的轴向相互平行。上述设计保证运行更加稳定。
[0061]
夹板61由矩形框架和矩形框架内固设横条、纵条构成,其中矩形框架上部设计成一排纵条,矩形框架上部设计成一横条,横条的长度方形为水平方向,纵条的长度方形为竖直方向,横条之间至少具有10mm的距离,纵条部分加紧奶牛牛腿以上部分。若加紧奶牛牛腿以上部分设计成横条,奶牛身体的突起部分可能会压在横条上,造成奶牛的体重数据的称量误差增大。
[0062]
参见图7和图8,进一步,奶牛夹紧组件62还包括压杆6216,压杆6216的一端与第七连杆6211的中部固定连接,压杆6216的另一端为自由端。
[0063]
参见图9,进一步,基于体况评分的奶牛分类系统还包括自锁机构70,在称重围栏11上设有长条孔,在长条孔内设有数个自锁机构70,自锁机构70沿长条孔的长度方向均布,自锁机构70受力后,可相对称重围栏11单向转动,自锁机构70不受力时可自动复位。
[0064]
参见图9,进一步,自锁机构70包括固定柱71、转动柄72、复位弹簧73,固定柱71固设于长条孔上部的称重围栏11上,转动柄72的下端与长条孔下部的称重围栏11转动连接,转动柄72的上端延伸至超过固定柱71水平高度,复位弹簧73的一端与称重围栏11固定连接,复位弹簧73的另一端与转动柄72固定连接。
[0065]
参见图9,进一步,自锁机构70还包括推杆,推杆穿过两个称重围栏11上的长条孔,并位于两个转动柄72之间。
[0066]
基于体况评分的奶牛分类系统的使用方法:
[0067]
开启称重通道10一侧的旋转门机构,奶牛进入称重通道10;
[0068]
关闭上述旋转门机构,按下压杆6216,奶牛被夹板61固定;
[0069]
奶牛体况评价装置80获得奶牛的体重数据和bcs数据,按照预定的评价标准开启对应的分类门;
[0070]
将推杆穿过两个长条孔,并向前移动推杆,转动柄72转动,推杆向前移动一个位置,转动柄72复位,以将奶牛从称重通道10赶出至分类通道30。
[0071]
本发明实施例装置中的模块或单元可以根据实际需要进行合并、划分和删减。
[0072]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1